The Intelligent Conversational Humanoid Robot
... However, when it comes to engineering, the purpose of artificial intelligence is to use knowledge to solve real-world problems. One of these problems, similar to the problem of the Turing Test, is how to make an artificial device or creature appear more human. To address this problem, a technology h ...
... However, when it comes to engineering, the purpose of artificial intelligence is to use knowledge to solve real-world problems. One of these problems, similar to the problem of the Turing Test, is how to make an artificial device or creature appear more human. To address this problem, a technology h ...
The 1995 Robot Competition and Exhibition - David P. Miller
... tasks as goal-directed navigation, feature detection, object recognition, identification, and physical manipulation as well as effective humanrobot communication. The competition consisted of two separate events: (1) Office Delivery and (2) Office Cleanup. The exhibition also consisted of two events ...
... tasks as goal-directed navigation, feature detection, object recognition, identification, and physical manipulation as well as effective humanrobot communication. The competition consisted of two separate events: (1) Office Delivery and (2) Office Cleanup. The exhibition also consisted of two events ...
The 2004 Mobile Robot Competition and Exhibition
... through software created by Haptek Technology with an intelligent conversation system, the interface is able both to respond to human inputs appropriately and to react with a display of appropriate emotions. The end result is that users spend an average of approximately 40 percent more time interact ...
... through software created by Haptek Technology with an intelligent conversation system, the interface is able both to respond to human inputs appropriately and to react with a display of appropriate emotions. The end result is that users spend an average of approximately 40 percent more time interact ...
Reasoning robot, involved tasks/modules and robot world
... reasoning and robot world representation, sensing and perception, and actuation modules (both hardware and software), which are called jointly “a robot control architecture”. ...
... reasoning and robot world representation, sensing and perception, and actuation modules (both hardware and software), which are called jointly “a robot control architecture”. ...

A framework for making sophisticated robotics accessible
... sensors used. Some sensors provide specific range information, like distance to an obstacle in meters or millimeters. Others simply provide a numeric value where larger values correspond to open space and smaller values imply nearby obstacles. In our abstractions, in addition to the default units pr ...
... sensors used. Some sensors provide specific range information, like distance to an obstacle in meters or millimeters. Others simply provide a numeric value where larger values correspond to open space and smaller values imply nearby obstacles. In our abstractions, in addition to the default units pr ...

Learning Concepts by Interaction
... If machines could acquire conceptual knowledge with the same facility as humans, then AI would be much better off. There's no denying the dream of a machine that knows roughly what we know, organized roughly as we organize it, with roughly the same values and motives as we have. It makes sense, then ...
... If machines could acquire conceptual knowledge with the same facility as humans, then AI would be much better off. There's no denying the dream of a machine that knows roughly what we know, organized roughly as we organize it, with roughly the same values and motives as we have. It makes sense, then ...

Controlling a mobile robot with Visual Prolog 7
... and computer (see Fig. 5) After being turned on, robot is moving around for some time to adjust his sensors. In the initial state robot moves randomly, until the computer tells him to look for the line. Having found the line, robot starts to follow it. If a bright flash of light frightens robot, he ...
... and computer (see Fig. 5) After being turned on, robot is moving around for some time to adjust his sensors. In the initial state robot moves randomly, until the computer tells him to look for the line. Having found the line, robot starts to follow it. If a bright flash of light frightens robot, he ...

Explaining robot actions - Advanced Technology Laboratories
... mode and world information. We have developed but not implemented algorithms that examine changes in the grids used to produce the cost map. These algorithms look for the most influential cells on the robot’s route and determine what grid(s) correspond to the values of these cells. By understanding ...
... mode and world information. We have developed but not implemented algorithms that examine changes in the grids used to produce the cost map. These algorithms look for the most influential cells on the robot’s route and determine what grid(s) correspond to the values of these cells. By understanding ...
Poster title - Tarleton State University
... Experimental results Acknowledgement: Many thanks to Arun Mahendra for his contribution to the design of this poster! ...
... Experimental results Acknowledgement: Many thanks to Arun Mahendra for his contribution to the design of this poster! ...
Slide 1
... Water clocks are a big breakthrough for timepieces. Up until then the Greeks used hour glasses that had to be turned over after all the sand ran through. Ctesibus' invention changed this because it measured time as a result of the force of water falling through it at a constant rate. In general, the ...
... Water clocks are a big breakthrough for timepieces. Up until then the Greeks used hour glasses that had to be turned over after all the sand ran through. Ctesibus' invention changed this because it measured time as a result of the force of water falling through it at a constant rate. In general, the ...
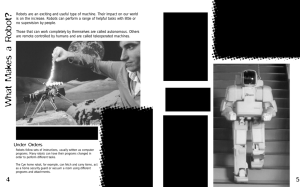
robot
... no supervision by people. Those that can work completely by themselves are called autonomous. Others are remote controlled by humans and are called teleoperated machines. ...
... no supervision by people. Those that can work completely by themselves are called autonomous. Others are remote controlled by humans and are called teleoperated machines. ...
Super Robot Monkey Team Hyperforce Go!
Super Robot Monkey Team Hyperforce Go! (commonly known by its initialism, SRMTHFG) is an American/Japanese animated television series, and was created by Ciro Nieli, one of the directors of Teen Titans, produced by Jetix Animation Concepts with animation being done by a Japanese studio known as The Answer Studio (who would later work on the Cartoon Network original series Transformers: Animated). Set mainly on the fictional planet of Shuggazoom, the series follows the adventures of five cyborg monkeys and a human boy named Chiro as they struggle to protect their planet - and the rest of the universe - from the forces of evil.As is obvious from the visual appearance of the show, there is a significant anime influence present, despite being produced for American television. It was also influenced by Star Trek, Super Sentai (most recognizably exemplified in the West by Power Rangers), Voltron and Star Wars. The show also contains various references to pop culture, a notable example being the episode ""Season of the Skull"", which is a parody of the 1970s thriller The Wicker Man.