Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
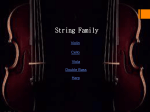
Slide 1 Mr Chairman, honourable judges, fellow course mates, hello and good morning. My name is Boon Yao and on behalf of my team I would like to present our project Robofiddler: Robotic violin player, project no. 395 which is supervised by Dr. Frank Wornle. My team also includes Joshua, Chin Hooi and Beinjy. Slide 4 Here is the seminar outline where I will be giving a brief background, our project goals, and a brief overview to the project’s current design. Joshua will be presenting a detailed discussion of the bowing mechanism. Next Beinjy will be presenting the fingering mechanism. Chin Hooi will present the design’s control system overview and finally wrap things up with a summary of achievements made and conclusion. Slide 5 Now, a brief background on the violin. The violin is the smallest and highest pitch among string instruments. It comprises of four open strings tuned to perfect fifths, which are G, D, A, E from the lowest to the highest pitch. Sound is produced by vibrating the strings through plucking or bowing by using a bow with the right hand. Pitch progression are changed by shortening the strings using left hand fingering pressure. Violin playing can be viewed in 3 parts which plays and integral part in our project design. The left arm for fingering, the right arm for bowing, and the most important thing is through the human brain and intelligence where musical tunes and expressions can be produced with the violin. There are also many bowing styles that create articulation and dynamics to musical tone production which I will not discuss this today. And there is also the vibrato which is a violin fingering skill where the pitch of note varies in pulsating rhythm, this also adds articulation. I will let you now hear an audio sample of a simple violin sound. Slide 6 The following images are a simple anatomy of the acoustic violin and the bowing stick. There are various parts of the violin and bow which attention will be paid to, the neck and fingerboard are used for the left arm fingering (pointing at neck and fingerboard) . The bowing action is placed here right above the bridge (pointing at bridge). Looking at the bow here, the right hand holds onto the frog and the pad, the hair is generally either made of horse hair or synthetic fiber. (pointing at frog, pad and hair) Slide 7 The image at the far left are the musical notes of the basic fingering position. The bold colored ones are the open strings and the rest are in 1 semitone apart from the lowest to the highest pitch. The next two images are a good example of how the violin and bow is hold and played. Note that the bow position changes angle as it interchange strings. Slide 8 In this advanced technological age, there are several robotic systems that are invented and are also commercially available which are able to play the violin in a way where it closely imitates the human violin player. Here are some good examples. The left side image shows the Virtuoso violin of QRS music technologies, the whole system is MIDI controlled and pitch is produced using vibrating string blades and electromagnetism, the bowing closely imitates the human bowing action. Although this is impressive but it cost a fortune of 25000 US dollars. The next image shows the Kansei violin playing robot developed by Shibuya Labs of Ryukoku University. This is an elaborate robotic system with complete fingering and bowing mechanism where it imitates and applies human emotions to play the violin. The problem with this one is that its not very portable and too chunky. Therefore, cost and mobility are important factors when designing the Robofiddler. Slide 9 I will now show you a short video sample of the Gulbransen virtuoso violin. Slide 10 With all the background information in mind, our main project goal is to design and build a robotic system with the ability to play the acoustic violin when given a command of simple musical notes. The 3 main specifications of the system which will be discussed by the team are the mechanical bowing system , the mechanical fingering system and the control system which commands and control the actuation of the robotic system. We also aim to design a low cost system which is portable and able to stimulate in the application of robotics and control. Slide 11 This is a solid edge image of the current design. This is the fingering system where the actuators are placed closed by, this is where the violin’s body will be rested upon. and this is the bowing system and its actuators. (brief about pc host, microcontrollers) I will now hand over to Joshua for a detailed discussion of the design.