Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
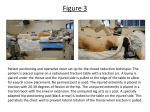
CEDRAT News - N° 66 - June 2014 Design optimization of traction motors for EV applications. W͘>ĂnjĂƌŝĂŶĚ:͘tĂŶŐͲdŚĞhŶŝǀĞƌƐŝƚLJŽĨ^ŚĞĸĞůĚ͘ I ncreasing concerns on energy security and environmental pollution by fossil fuel engines have pushed significant research in electric vehicles (EVs). The requirements for traction electrification are highly demanding in terms of efficiency, torque and power density, wide constant power operating range and cost effectiveness. The challenge for the EV traction machine design is that it has to produce high torque, usually 2-3 times the nominal value, at standstill or low speed in order to provide the required acceleration and hill climbing requirements. On the other hand, the machine needs to output peak power (~2x the nominal value) over a wide speed range to provide acceleration during high speed driving. This wide torque-speed operating range imposes significant constraints on the achievable machine efficiency and power density using conventional design methodologies. Since an EV operates over a wide torque-speed range in response to various dynamic driving conditions, the traction machine design should be aimed to achieve overall energy saving under a given set of constraints over a representative driving cycle rather than a few operating points (such as the rated and/or peak operating points at base and/or maximum speed which are mainly used for hillclimbing/acceleration during driving). In order to realize high fidelity multi-parameter FE-based design optimizations against driving cycles, while avoiding enormous computational time and maintaining high accuracy, two solutions were exploited. The driving cycles, such as the New European Driving Cycle (NEDC) and Artemis Urban Driving Cycle (AUDC) shown in Fig. 1, are characterized into a finite number of representative points (referred to as “energy gravity centers”), which can accurately represent the cycle energy loss (viz. the error being <4%). The “energy gravity centers” for NEDC and AUDC are illustrated in Fig. 2 under the required Torque-Speed envelope of the motor. Thus, the optimization can be conducted against these operating points leading to a drastically reduced computational time. Further, the use of an efficient FE-coupled optimization tool (GOT-It) with distributed computing capabilities (CDE) provides an ideal and effective optimization environment for EV traction machines. It can yield a global optimum solution with the minimum number of FE evaluations (i.e. dependent on the number of optimizing parameters) without sacrificing accuracy. Accordingly, the development of effective and computationally efficient optimization techniques and tools is considered essential for the design of EV traction machines. In this article, the process of enhancing the energy efficiency of a traction machine against a defined driving cycle with the aid of CEDRAT’s software suit (i.e. Flux, GOT-It and CEDRAT distribution engine - CDE) will be demonstrated. Design specification, challenges and approach The integration of driving cycles in the design optimization process places significant challenges in terms of computational time, especially when high fidelity FE evaluations against the hundreds of cycle points are required. &ŝŐƵƌĞϮ͗dŽƌƋƵĞͲƐƉĞĞĚĞŶǀĞůŽƉĞĂŶĚĚƌŝǀŝŶŐĐLJĐůĞ ŽƉĞƌĂƟŶŐƉŽŝŶƚƐ͘ Parameter Value Active length 105 mm Stator outside diameter 2100 rpm Maximum cruise speed 8200 rpm Peak torque below and at base speed for 120 s 30.0 Nm Continuous torque below and at base speed 17.0 Nm Peak torque at maximum cruise speed 7.4 Nm Continuous torque at maximum cruise speed 4.4 Nm Peak power 6.6 kW Continuous power below and at base speed 3.75 kW Nominal DC link voltage 120 V Maximum inverter current 120 A Continuous current density - Jrms Maximum permissible line-to-line voltage Cooling method &ŝŐƵƌĞϭ͗EĂŶĚhƐƉĞĞĚƉƌŽĮůĞƐ͘ 120 mm Based speed < 8 Arms/mm2 < 250 V Air-cooled dĂďůĞϭ͗dƌĂĐƟŽŶŵŽƚŽƌĚĞƐŝŐŶƐƉĞĐŝĮĐĂƟŽŶ͘ (see continued on page 7) -6- CEDRAT News - N° 66 - June 2014 GOT-It GOT-It & CDE Optimizations using GOT-It & CDE The motor considered for the purposes of this article is part of a distributed drive-train, class 2 EV. The traction machine design specification, obtained from the vehicle’s dynamic model and acceleration and hill-climbing requirements, are listed in Table 1. An interior mounted permanent magnet synchronous motor (IPMSM) was used as a design case study to demonstrate the optimization process. The motor cross section along with its leading design parameters is shown in Fig. 3. The motor was optimized with respect to 8 design parameters, viz. the back-iron thickness (Hy), tooth width (Tw), rotor to stator-outer radius ratio (Ri/Ro), magnet depth (Dm), thickness (hm), width (wm), angle span (βm) and coil turn number (TN). The multi-parameter, FE-based optimization process with Flux and GOT-It is illustrated in Fig. 4. &ŝŐƵƌĞϱ͗^ĞƋƵĞŶƟĂůĐŽŵƉƵƟŶŐ;ůĞŌͿĂŶĚ ƉĂƌĂůůĞůĐŽŵƉƵƟŶŐ;ƌŝŐŚƚͿ͘ The objective was to maximize the system (motor + inverter) energy efficiency over the NEDC while satisfying the required torque-speed operating range and a given set of electrical, thermal and volumetric constraints (viz. Table 1). The use of a sequential surrogate optimizer (SSO) from GOT-It, which enables indirect optimization through response surface building and postprocessing by genetic algorithm (GA), allows for timely efficient multi-parameter optimizations. For this case, where 8 parameters are involved, 246 design samples should be solved in 3 iterations in order to acquire a global optimum solution with the SSO. This approximates to a computational time of 123 hours, since it takes ~30min to evaluate the system efficiency from the FE model for each sample over the 12 NEDC representative points. &ŝŐƵƌĞϲ͗^LJƐƚĞŵĞŶĞƌŐLJĞĸĐŝĞŶĐLJĞǀŽůƵƟŽŶŽǀĞƌE͘ &ŝŐƵƌĞϯ͗ƌŽƐƐƐĞĐƟŽŶ ĂŶĚŽƉƟŵŝnjŝŶŐ ƉĂƌĂŵĞƚĞƌƐŽĨ/WD^D͘ Whilst this is far superior to simple parametric optimizations, it can still be considered as relatively computationally intensive, particularly if multiple optimizations or more optimizing parameters are required. It should be noted that the computational time per sample varies depending on the model size and nonlinearity. In this case, only 1/6th of the model was considered due to symmetry. This implies a 3-fold increase in computational time (~ 15 days) for a case where half model must be used. However, the computational time for large multi-parameter optimization models can be significantly further reduced by using a distributed computing tool (CDE) associated with GOT-It optimizer. This allows for multiple design samples to be solved simultaneously on a multi-core CPU as illustrated in Fig. 5. Compared to sequential computing (123 hours), the global optimum solution that satisfies all design constraints is acquired in only 35 hours for the 8-parameter optimization problem. The system energy efficiency evolution over NEDC is shown in Fig. 6. The reduction in computational time is approximately linear to the number of CPU cores used (in this case 4). This indicates that the 35 hours can potentially further reduce to almost half (~ 17 hours) if an additional 4-core CPU is used in a cluster configuration. Conclusion It has been shown that multi-parameter, high fidelity FE-based optimizations against driving cycles, which typically require an enormous amount of computational time, can be effectively performed in a drastically reduced time by using GOT-It and CDE. This provides great versatility in rapidly exploiting the complete design space for EV traction machines which are characterized by many design challenges. &ŝŐƵƌĞϰ͗KƉƟŵŝnjĂƟŽŶƉƌŽĐĞƐƐǁŝƚŚ&ůƵdžĂŶĚ'KdͲ/ƚĐŽƵƉůŝŶŐ͘ -7-