Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
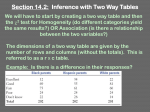
Error Propagation Uncertainty • Uncertainty reflects the knowledge that a measured value is related to the mean. • Probable error is the range from the mean with a 50% certainty. – For a normal distribution: 0.675 Coefficient of Variation • The coefficient of variation (CV) is the ratio of the standard deviation to the mean. – Fractional standard deviation cv • The CV for the Poisson distribution is fixed by the mean. 1 cv • For Poisson or normal distributions the measured count n has a fixed estimate for . – Significance is 0.683 1 n n n 1 Multiple Uncertainties • Measurements often involve multiple variables. • First order expansion: Q Q ( xi x ) ( yi y ) x y 1 1 Q Qi NQ( x , y ) Q( x , y ) N N Qi Q( x , y ) • Assume two independent variables x, y. – N measurements of xi, yi – Assume small differences from means. • The cross term (covariance) vanishes for large N. • The variance in Q is: Q 1 Q Q2 ( xi x ) ( yi y ) N y x 2 Q Q Q2 x2 x2 x y 2 2 Count Rate Error • Counting experiments are expected to have Poisson statistics. – Assume precise time measurement • Gross count rate includes all counts in a time interval. – Number of counts ng – Time tg n Pn n! e g g ng rg ng tg gr g tg ng tg rg tg Significant Difference Typical Problem • Two technicians measure a sample with a 35% efficiency counter, Julie gets 19 counts in 1 min and Phil gets 1148 counts in 60 min. What is the confidence that the activity is the stated value of 42.0 min-1? Answer • From the given value, the expected count rate rg = 14.7 min-1. • The difference in Julie’s rate from expected is 4.3 cpm. – By chance 27% of time rJ J nJ t 4.3 1.12 t 14.7 • The difference in Phil’s rate from expected is 4.4 cpm. – By chance 10-19 of time rP P nP t 1148 882 8.96 t 882 Net Count Rates • Experiments typically have a background counting rate. – Net count rate subtracts background • This involves two variables with errors. – Use standard deviation of gross and background rates ng nb rn rg rb t g tb nr nr g2 t g2 ng b2 tb2 gr2 br2 rg rb nb 2 2 t g tb t g tb Background Subtraction Typical Problem • A counter with 28% efficiency measures a background of 2561 counts in 90 min. A 10 min measure of a sample is gets 1426 counts. How long must a sample be measured to get the activity within 5% with 95% confidence? Answer • The activity will have the same significance as the count rate. – Scales with efficiency • Find the count rates. – rg = 142.6 min-1 – rb = 28.5 min-1 – rn = 114 min-1 – 0.05 rn = 5.7 min-1 • 95% is 1.96, nr = 2.91 min-1. nr tg rg tg rb tb rg nr2 rb tb 17.5 min Optimum Counting • The time to measure can be optimized. – Based on background and gross rates. • A fixed total time can be partitioned into optimum segments. – Variance can be used instead of standard deviation T t g tb r d 2 d rg nr b dt g dt g t g T t g rg 0 rg rb rb 2 2 2 0 2 t g T t g t g tb tg tb rg rb Short Lives • A rapidly decaying does not obey Poisson statistics. – Still Bernoulli process – Use lt >> 1 – For large t, 0 • The equations can be adapted for a fixed efficiency. – At long times limited by efficiency Np N 1 e lt Npq N 1 e lt e lt e lt c N 1 e lt c N 1 e lt 1 e lt ct N 1 c 1 False Measurements • Many measurements only seek to determine if any activity is present above background. • The minimum significant measurement determines the conditions to assert that there is activity above background. – Failure is false positive; type I error. • The minimum detectable measurement determines the conditions to assert that there is no activity. – Failure is false negative; type II error. Tails of the Curve • The type I and type II errors are due to statistical fluctuations. • A type I error is set by a rate r1 – Measurements in curve area a give a false positive. • A type II error is set by a rate r2 – Measurements in curve area b give a false negative. Pn(rn) a b r1 0 r2 rn Type I Error • The minimum significant measurement, r1, depends on the tolerance for error. • Set the probability a. – Area in tail of normal distribution equal to a – Equate to number of standard deviations ka r1 ka 2 gr ka2 ka r1 2t g 2 2 br ka r1 rb rb tg tb t g tb ka2 4rb 2 t t tg gb for tg = tb, r1 ka ka ka2 8nb 2t Background Error • A type I error is a false positive. – Can’t be made if a real signal is present. • With no signal, the only measurement is background. – For nb >> ka2, k r1 a 2nb t – For well measured background, nb2 = B, r1 ka t B Typical Problem • A background reading at 29% efficiency is 410 counts in 10 minutes. The maximum risk of false positive is 5%. How accurate is the approximation? Answer • From 5%, ka = 1.65. • To compare, nb = 410. • Times are equal, r1 = 4.9 with the full formula or 4.7 with the approximation. Type II Error • The minimum detectable measurement also depends on risk. – Willingness to risk a miss • The result is related to the minimum significant measurement. rg rb r2 k b • Set the probability b. – Area in tail of normal distribution equal to b – Equate to number of standard deviations kb r2 rg rb k b r2 r1 k b rg tg rg rb tg rb tb rb t g tb r1 rb tg t g tb t g tb t g tb Background Counts • As with type I, there are approximations based on the knowledge of the background. – With a large background count, nb >> ka2. – The best case fixes the background, nb2 = B. r2 r2 ka k b t ka t B 2nb ka t B r2t k b2 k b2 ka B r2 ka kb 1 t 2 B B 4 B Noise • Counts are often made at a variety values for some variable. – Time, position, angle, mass, frequency, energy, etc. • Noise refers to the fluctuations in the counts from point to point in the variable. – Statistical tests apply to one or more bins. Autocorrelation • An autocorrelation function tests for a periodic signal in the presence of noise. y (t ) s (t ) n(t ) • The autocorrelation of the combination is based on mean values compared at two points. – Cross terms are zero for long times. yy (t ) s(t ) n(t )s(t ) n(t ) yy (t ) s(t ) s(t ) s (t )n(t ) n(t ) s (t ) n(t )n(t ) yy (t ) ss (t ) sn (t ) ns (t ) nn (t ) yy (t ) ss (t ) nn (t ) Correlation Measure • Autocorrelated noise should peak strongly at 0. • Sinusoidal signals would show periodic peaks of auto correlation. • “This sample autocorrelation plot shows that the time series is not random, but rather has a high degree of autocorrelation between adjacent and nearadjacent observations.” nist.gov