Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Lumped element model wikipedia , lookup
Index of electronics articles wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Operational amplifier wikipedia , lookup
Regenerative circuit wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Surge protector wikipedia , lookup
Opto-isolator wikipedia , lookup
Rectiverter wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Integrated circuit wikipedia , lookup
Flexible electronics wikipedia , lookup
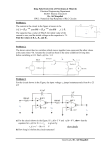
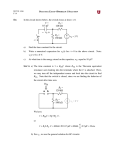
Chapter 5 Copyright © The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Transient Analysis A steady-state region for 0 ≤ t ≤ 0.2 s; a transient region for 0.2 ≤ t ≤ 2 s (approximately); and a new steady-state region for t > 2 s, where the voltage reaches a steady DC or AC condition. The objective of transient analysis is to describe the behavior of a voltage or a current during the transition between two distinct steadystate conditions. Examples of transient response A general model of the transient analysis problem Regardless of how many resistors the circuit contains, it is a first-order circuit. The response of a first-order circuit to a switched DC source will appear in one of the two forms shown below, which represent, in order, a decaying exponential and a rising exponential waveform. Decaying and rising exponential responses Applying KVL around the loop, we may obtain the following equation: Circuit containing energy storage element Any circuit containing a single energy storage element can be described by a differential equation of the form Second-order circuit DC Steady-State Solution The term DC steady state refers to circuits that have been connected to a DC (voltage or current) source for a very long time, such that it is reasonable to assume that all voltages and currents in the circuits have become constant. At DC steady state, all capacitors behave as open circuits and all inductors behave as short circuits. Consider the defining equation for the capacitor Abrupt change in capacitor voltage The value of an inductor current or a capacitor voltage just prior to the closing (or opening) of a switch is equal to the value just after the switch has been closed (or opened). Formally Where the notation 0+ signified “just after t = 0” and 0- means “just before t = 0.” FOCUS ON METHODOLOGY FIRST-ORDER TRANSIENT RESPONSE 1. Solve for the steady-state response of the circuit before the switch changes state (t = 0−) and after the transient has died out (t→∞).We shall generally refer to these responses as x(0−) and x(∞). 2. Identify the initial condition for the circuit x(0+), using continuity of capacitor voltages and inductor currents [vC = vC(0−), iL(0+) = iL(0−)]. 3. Write the differential equation of the circuit for t = 0+, that is, immediately after the switch has changed position. The variable x(t) in the differential equation will be either a capacitor voltage vC(t) or an inductor current iL(t). It is helpful at this time to reduce the circuit to Thévenin or Norton equivalent form, with the energy storage element (capacitor or inductor) treated as the load for the Thévenin (Norton) equivalent circuit. Reduce this equation to standard form (equation 5.8). 4. Solve for the time constant of the circuit: τ = RTC for capacitive circuits, τ = L/RT for inductive circuits. 5. Write the complete solution for the circuit in the form x(t) = x(∞) + [x(0) − x(∞)]e−t/τ General Solution of First-Order Circuits Let the initial condition of the system be x(t = 0) = x(0). Then we seek to solve the differential equation This solution consists of two parts: the natural response (or homogeneous solution), with the forcing function set equal to zero, and the forced response (or particular solution), in which we consider the response to the forcing function. The complete response then consists of the sum of the natural and forced responses. Once the form of the complete response is known, the initial condition can be applied to obtain the final solution. Natural Response Forced Response Complete Response Energy Storage in Capacitors and Inductors Decay through a resistor of energy stored in a capacitor Decay through a resistor of energy stored in an inductor Parallel case Second-order circuits Solution of Second-Order Circuits Response of switched second-order system 1. The response asymptotically tends to a final value of 1. 2. The response oscillates with a period approximately equal to 6 s. 3. The oscillations decay (and eventually disappear) as time progresses. 1. The final value of 1 is predicted by the DC gain KS = 1, which tells us that in the steady state (when all the derivative terms are zero) x(t) = f(t). 2. The period of oscillation of the response is related to the natural frequency: ωn = 1 leads to the calculation T = 2π/ωn = 2π ≈ 6.28 s. Thus, the natural frequency parameter describes the natural frequency of oscillation of the system. 3. Finally, the reduction in amplitude of the oscillations is governed by the damping ratio ζ. You can see that as ζ increases, the amplitude of the initial oscillation becomes increasingly smaller until, when ζ = 1, the response no longer overshoots the final value of 1 and has a response that looks, qualitatively, like that of a first-order system. Response of switched second-order system Elements of the Transient Response The solution of a second-order differential equation also requires that we consider the natural response (or homogeneous solution), with the forcing function set equal to zero, and the forced response (or particular solution), in which we consider the response to the forcing function. The complete response then consists of the sum of the natural and forced responses. Once the form of the complete response is known, the initial condition can be applied to obtain the final solution. FOCUS ON METHODOLOGY ROOTS OF SECOND-ORDER SYSTEMS Case 1: Real and distinct roots. This case occurs when ζ > 1, since the term under the square root sign is positive in this case, and the roots are s1,2 = −ζωn ± ωn √ ζ 2 − 1. This leads to an overdamped response. Case 2: Real and repeated roots. This case holds when ζ = 1, since the term under the square root is zero in this case, and s1,2 = −ζωn = −ωn. This leads to a critically damped response. Case 3: Complex conjugate roots. This case holds when ζ < 1, since the term under the square root is negative in this case, and s1,2 = −ζωn ± jωn √ 1 − ζ 2. This leads to an underdamped response. FOCUS ON METHODOLOGY SECOND-ORDER TRANSIENT RESPONSE 1. Solve for the steady-state response of the circuit before the switch changes state (t = 0−) and after the transient has died out (t→∞).We shall generally refer to these responses as x(0−) and x(∞). 2. Identify the initial conditions for the circuit x(0+), and ˙x(0+), using the continuity of capacitor voltages and inductor currents [vC(0+) = vC(0−), iL(0+) = i + L(0−)] and circuits analysis. This will be illustrated by examples. 3. Write the differential equation of the circuit for t = 0+, that is, immediately after the switch has changed position. The variable x(t) in the differential equation will be either a capacitor voltage vC(t) or an inductor current iL(t). Reduce this equation to standard form. 4. Solve for the parameters of the second-order circuit, ωn and ζ. 5. Write the complete solution for the circuit in one of the three forms given below as appropriate: Overdamped case (ζ > 1): Critically damped case (ζ = 1): Underdamped case (ζ < 1): 6. Apply the initial conditions to solve for the constants α1 and α2.