Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
EMS1EP Lecture 9
Analog to Digital Conversion (ADC)
Dr. Robert Ross
Overview
(what you should learn today)
•
•
•
•
•
•
Revision of Analog and Digital
ADC + Quantisation
Examples of Analog Inputs
Worked examples
Minor Project
Major Project
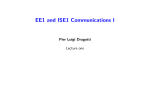
Analog/Digital
Digital
Voltages
Physical
Variable
(Sound,
light,
pressure,
temp, ect)
DAC
ADC
Transducer
(Sensor)
Analog
to
Digital
Converter
Microcontroller
(LArduino)
Analog
Voltages
Digital
to
Analog
Converter
Actuator
Control
Physical
Variable
(Sound,
light,
pressure,
temp, ect)
Analog to Digital Converters (ADC)
• Measure an analog value and provide a digital
representation of this value
• Like a digital multimeter for your
microcontroller
• Inside the Arduino microcontroller
• Several different techniques used (covered in
second year microcontrollers)
ADC quantisation
• Converting a continuous value into a digital number
• Arduino has a 10bit ADC – (210 = 1024 voltage levels)
• Value returned in the range of 0-1023 (corresponding
to 0-5V)
• 5/1023 = 4.89mV/step
• Each time you increase the voltage by 4.89mV the
digital value should go up 1 step
ADC on the LArduino
• LArduino has 4 analog inputs
(marked Analog 0-3)
• Analog inputs can be connected
to all of these inputs at the same
time
• Can only read one analog input
at a time
Using the ADC
• Analog pins don’t need to be setup in the setup function
• To read an analog value use the analogRead() command.
• Syntax:
int analogRead(<ADC Pin>);
Returns the analog result
<ADC Pin>: specifies which ADC pin you wish to read (i.e. Pins 0-4)
Typical use:
int ADC_Result;
ADC_Result = analogRead(2);
Examples of Analog Inputs
Temperature
Acceleration
Voltage (Variable resistor
forms voltage divider)
Pressure
Light
Worked Example: Potentiometer
• Interface a potentiometer to an analog input
on the Arduino
• Every 500ms read the value of the
potentiometer and send it via the serial port
to the PC
• If the value is more than 500 turn ON an LED –
else turn off LED
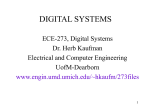
Worked Example: Potentiometer
• Circuit Diagram
5V
5V
LArduino Board
Analog Pin2
Voltage (Variable resistor
forms voltage divider)
Pin5
Worked Example: Potentiometer
int pot1 = 2;
int led1 = 5;
int ADCValue;
void setup()
{
Serial.begin(<baud rate>); //Setup serial port
pinMode(led1, OUTPUT);
//Setup LED
delay(500);
}
Worked Example: Potentiometer
void loop()
{
ADCValue = analogRead(pot1); //Read analog value
Serial.print(“ADC Result: “);
Serial.println(ADCValue);
if(ADCValue > 500){ //Turn LED on
digitalWrite(led1,LOW);
}
else{ //Turn LED off
digitalWrite(led1,HIGH);
}
delay(500); //500ms delay
}
Measuring multiple ADCs
• Only one ADC can be measured at a time
• If more than one need to be measured step
through and measure one after another
ADCValue1 = analogRead(ADC1);
ADCValue2 = analogRead(ADC2);
ADCValue3 = analogRead(ADC3);
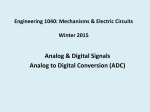
Worked example: Light Sensor
• Create a ‘garden light sensor’
• A photodiode is used to sample how much light
there is and gives an analog voltage output
• If the voltage is below a preset threshold then turn
on another LED – otherwise turn off the LED
5V
5V
100K
LArduino Board
Analog Pin1
Pin6
Worked Example: Light Sensor
int pd1 = 1;
int led1 = 6;
void setup()
{
pinMode(led1, OUTPUT);
}
void loop()
{ //You fill in this section
}
//Setup LED
Minor Project: Level Crossing System
• Construction of a train level crossing system
• Description – a level crossing system using 1
servo as the boom gate, activated by a
debounced switch and with flashing warning
lights and a audible buzzer alarm
• Deliverables:
– Working System for demonstration day
– Schematics (completed in Altium)
– Code
Minor Project: Level Crossing System
• When the switch is pressed (and at some point released):
– The boom gate should come down (servo turn 90o)
– Two LEDs should alternately flash at 1Hz
– A buzzer should be controlled to beep in 0.5 second bursts (use PWM
with 50% duty cycle)
• The switch is a debounced switch. When the switch is pressed
a second time the boom gate should come up, the LEDs
should stop flashing and the buzzer should remain silent
• See handout for more details
• Minor project is to be completed in the lab (may require a
small amount of extra outside lab time)
• Demonstrations in lab 8
What the minor project should look
like
Major Project
• Build a robot
• Infrared photodiodes on the bottom (allow it
to sense light/dark objects
• Battery powered
• Control algorithms
• Applications
– Line tracking/following
– Staying inside a paddock
– Racing
What the major project should look
like
Continuous Rotation Servos
• By default servo motors only have about 180O of
motion that they can travel over
• Servos can be modified for continuous rotation (they
can go all the way around)
• PWM signal controls speed not position of
continuous rotation servos
• Involves:
– Removing feedback potentiometer (variable resistor)
– Soldering in resistors
– Cutting notch out of gears
• Instruction video will be provided in the labs
Control Algorithms
• Three light sensors on the bottom of the robot used
to detect the lines
• For line following want to keep it close to the middle
sensor
• Possible readings:
–
–
–
–
–
–
–
No Sensors (but last seen on S1)
S1 only
S1+S2
S2 only
S2+S3
S3 only
No Sensors (but last seen on S3)
S1 S2 S3
Control Algorithms
• Suggested algorithm is a proportional one
– The further away the robot is from the line (S2 only) the
larger change in its relative speed between the wheels it
should make
– Should also give the robot a little forward bias so it keeps
moving forward and doesn’t get stuck in tight bends
• Can switch between just driving forward and control algorithm
• Will need to experiment with different speeds and
find a mix between speed and stability
• Execution tests will have races with the fastest robots
receiving bonus marks (but they must not leave the
track)
Summary
(What you learnt in this session)
• Many sensors that our microcontroller needs
to read are analog
• An ADC enables the microcontroller to read an
analog value and convert it to a digital number
• Introduction to the minor and major project
tasks