Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Linux adoption wikipedia , lookup
Plan 9 from Bell Labs wikipedia , lookup
Distributed operating system wikipedia , lookup
Unix security wikipedia , lookup
Security-focused operating system wikipedia , lookup
Burroughs MCP wikipedia , lookup
Spring (operating system) wikipedia , lookup
Linux kernel wikipedia , lookup
Thread (computing) wikipedia , lookup
Introduction to
Embedded Systems
Dr. Jerry Shiao, Silicon Valley University
Spring 2014
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
1
Section 5 Kernel Internals
Kernel Modules
Functionality
Object file that extends the running Kernel without rebuilding and
rebooting Kernel.
Loaded and unloaded upon demand.
Drivers to support new hardware or filesystems.
Support system calls.
Module Organization
Invoked by user application needing its service. Does not
execute on its own.
Allows application communicate to kernel:
proc file system (i.e. /proc).
System calls and ioctl calls.
- Process Control (i.e. load/execute/create/terminate process,
allocate/free memory.
- File management (i.e. create/delete/open/close/read/write file).
- Device Management (i.e. request/release/read/write device).
- Information Maintenance (i.e. get/set system data, get/set device
attributes).
Spring 2014
module_init() and module_exit().
Module installation (Insmod, modprobe), removal (rmmod), list
(lsmod).
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
2
Section 5 Kernel Internals
Kernel Modules
Without Loadable Kernel Modules
Need large, monolithic kernel for all possible functionality.
Kernel code memory not fragmented.
LKM load/unload fragments Kernel code memory.
Rebuild and reboot required for new functionality.
Waste memory on unused modules.
NOTE: With embedded systems, hardware will not change. During
embedded system development, modules are loadable and for
production, modules are made static and placed in the kernel.
License Issues
LKM are derived work of the Kernel.
“Tainted” Kernel when non-GPL LKM loaded (code not available to public).
MODULE_LICENSE macro for GPL.
EXPORT_SYMBOL_GPL macro resolves ONLY for GPL modules.
Configuration
.config file.
CONFIG_INSMOD=y
CONFIG_RMMOD=y
CONFIG_LSMOD=y
/lib/modules ( extension “.ko” ).
Spring 2014
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
3
Section 5 Kernel Internals
Kernel Modules
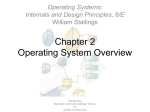
Loading
Modules Into the Kernel.
Kernel Module:
request_module()
System
call
execs modprobe
Insmod:
Kernel Initialization (/etc/rc.d scripts):
depmod –a
-- Create dependency file to be used by modprobe.
Spring 2014
/etc/modprobe.conf
-- Aliase to module.
…
alias eth0 e100
kmod subsystem:
/etc/modules/<version>/modules.dep
-- Dependency before loading.
…
/lib/modules/…/e100.ko: /lib/modules/…/mii.ko
/lib/modules/…/ext2.ko: /lib/modules/…/mbcache.ko
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
4
Section 5 Kernel Internals
Kernel Modules
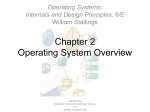
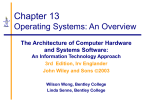
System Call – Explicit request to the kernel made through a software interrupt.
Service provided in the kernel, cross the user-space / kernel
boundary.
Linux C library – Provides the wrapper routines to issue a system call.
Wrapper
routine
Load arguments:
1) Register eax = system call index.
2) Software Interrupt (Interrupt 0x80).
main() {
xyz() {
…
…
xyz()
“SYSCALL”
}
}
User Application
system_call()
sys_xyz() {
…
…
sys_call_table[] -> sys_xyz()
}
…
“SYSEXIT”
Linux C library
System Call Handler
User Mode
Spring 2014
System Call
Service Routine
Kernel Mode
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
5
Section 5 Kernel Internals
Kernel Modules
#include <linux/module.h>
#include <linux/kernel.h>
…
MODULE_LICENSE(“GPL”);
MODULE_DESCRIPTION(“Mytime Module”);
MODULE_AUTHOR(“Linux:Embedded Class (SVU).
…
Int init_mytime_module( void )
{
printk(KERN_ALERT "Hello, world\n");
…
return ret;
} /* init_mytime_module */
Identify whether the module is GPL.
NOTE: EXPORT_SYMBOL_GPL()
only available to modules with GPL
compatible license.
Describes what module does.
Author of the module.
Int cleanup_mytime_module( void )
{
…
return ret;
} /* cleanup_my_time_module */
Kernel module initialization entry point.
Modules only in kernel space. Called
by insmod.
module_init( init_mytime_module );
module_exit( cleanup_mytime_module);
Spring 2014
Required for all modules. Defines for
MODULE_XXX macros.
Contained in ELF header in .modinfo
section.
Kernel module exit entry point. Called
by rmmod.
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
6
Section 5 Kernel Internals
Linux Device Drivers
Provides access to hardware devices, hiding details through set of
standardized APIs independent to specific driver.
Drivers provide APIs through system calls or through ioctl for the user to
access the actual hardware device.
Independent modules separate from Kernel.
Dynamic Loadable Module linkable and removable at runtime.
/dev directory contains all hardware devices accessable through file
system abstraction (required before device driver can access).
Device driver catagories.
Character Drivers.
Block Drivers.
Does not need buffering, byte I/O.
Accessed as stream of bytes. Do not need fixed block size.
/dev/console, /dev/ttyS0
Buffers to respond to requests.
Send and receive through blocks. The block size is determined by driver module.
Usually a filesystem (i.e. RAMDisk, USB stick).
Network Drivers.
Spring 2014
Interface is hardware device for transmit/receive packets, but could be software.
Network subsystem, not in /dev.
Accessed through name (i.e. eth0).
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
7
Section 5 Kernel Internals
Linux Device Drivers
Spring 2014
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
8
Section 5 Kernel Internals
Linux Device Drivers
Major number used by kernel to identify device driver.
Minor number used by device driver to distinguish devices of the
same type.
Hard drive multiple partitions, each partition minor number.
Multiple serial ports.
mknod command creates the device file in /dev.
Udev manages /dev directory.
Automatically selects the major numbers.
Prevents clutter of /dev with unused devices.
Only present devices in /dev.
Linux Assigned Name and Number Authority (LANANA) to get major
number.
/sys initially created to perform driver level debugging out of /proc.
/sys became useful to other subsystems. Contain exported information
about devices and drivers in user space.
/sys/devices are all devices in system.
/sys/class shows devices grouped according to classes.
/sys/block contains the block devices.
Spring 2014
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
9
Section 5 Kernel Internals
Linux Char Device Driver Components
#include <linux/module.h>
#include <linux/kernel.h>
…
MODULE_LICENSE(“GPL”);
MODULE_DESCRIPTION(“Device Driver”);
MODULE_AUTHOR(“Linux:Embedded Class (SVU).
…
Int init_device_driver( void )
{
major = register_chrdev(major, “foo”, &fops);
…
} /* init_device_driver */
Int cleanup_device_driver( void )
{
unregister_chrdev(major, “foo”);
…
} /* cleanup_device_driver */
module_init( init_device_driver );
module_exit( cleanup_device_driver);
Spring 2014
Character device created using:
#mknod /dev/foo c <major> 0
Registers device driver for character
device. “fops” is structure with
callback functions of file operations
for this device.
struct file_operations fops = {
.owner = THIS_MODULE,
.open = <device_open_cb>,
.release = <device_release _cb>,
.read = <device_read_cb>,
.write = <device_write_cb>,
.ioctl = <device _ioctl_cb>
}
Unregisters device driver by
releasing the major number for
character device, “foo”.
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
10
Section 5 Kernel Internals
Linux Block Device Driver Components
…
MODULE_LICENSE(“GPL”);
…
Int init_device_driver( void )
{
major = register_blkdev(major, “foo”);
foo.gd = alloc_disk( 16 );
foo.gd->major = major;
foo.gd->minors = 16;
set_capacity(foo.gd, <disk_size_in_sectors>);
strcpy(foo.gd->disk_name, “foo”);
foo.gd->fops = &foo_ops;
…
} /* init_device_driver */
Block device created using:
#mknod /dev/foo b <major> 0
Gendisk structure created, with 15
partition descriptors.
Initialize gendisk structure capacity.
Registers device driver for block
device. “foo_ops” is structure with
callback functions of file operations
for this device.
Int cleanup_device_driver( void )
{
unregister_blkdev(major, “foo”);
…
} /* cleanup_device_driver */
struct file_operations foo_ops = {
.owner = THIS_MODULE,
.open = <device_open_cb>,
.release = <device_release _cb>,
.read = <device_read_cb>,
.write = <device_write_cb>,
.ioctl = <device _ioctl_cb>
}
module_init( init_device_driver );
module_exit( cleanup_device_driver);
Unregisters device driver by
releasing the major number for block
device, “foo”.
Spring 2014
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
11
Section 5 Kernel Internals
Assignment 5: Kernel Modules
/proc
file system is used to store many system
configuration parameters.
Use the /proc file system to return the number of clock ticks
since the system initialized.
Kernel module to create /proc file structure (struct
proc_dir_entry) with file system read/write APIs.
Kernel variable jiffies represents the number of clock ticks
since system initialized.
Kernel variable HZ represents the clock tick rate, the
frequency of clock ticks per second (i.e. HZ = 250 means
hardware will have 250 ticks/second or 4 milliseconds per
tick.
User
application use system calls (i.e. read/write) to
interface with kernel module.
Insmod installs loadable kernel module into running
kernel.
Spring 2014
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
12
Section 6 Kernel Scheduling
Kernel processes heart of the Linux system.
Process
and files are fundamental concept in
Unix Operating System.
Process is a program in execution.
Consists of:
Executing program code.
Set of resources (i.e. open files).
Internal kernel data (i.e. struct task_struct).
Address space.
One or more threads of execution.
Data section (i.e. global variables).
Spring 2014
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
13
Section 6 Kernel Scheduling
Linux multitasking operating system (tasks
running concurrently).
Process is an independently running program that has its own set of
resources (i.e. output file).
Process managed with process descriptors (struct task_struct) in
circular doubly-linked list.
Use light weight processes or threads to support multithreaded
operation.
Light weight processes share same address space with each other
and parent process. Communication simple.
Heavy weight processes contains its own address space.
Communication through IPCs.
Linux process state:
TASK_RUNNING: Executing in CPU or waiting.
TASK_INTERRUPIBLE: Suspended waiting on some condition.
TASK_UNINTERRUPTIBLE: Suspended until a given event.
TASK_STOPPED: Stopped from receiving signal.
TASK_ZOMBIES: Child process terminated, but not waited on by its
parent. Does not release its process ID.
Spring 2014
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
14
Section 6 Kernel Scheduling
ps (Process Status) command:
[sau@localhost ~]$ ps –f
UID
PID PPID STIME
…
hermie 24
1 00:35:28
hermie 137
24 00:36:39
…
TTY TIME CMD
pts/1 0:01
pts/1 0:00
[sau@localhost ~]$ ps –ax
PID TTY
STAT TIME COMMAND
…
181 pts/1 S
0:01
-bash
231 ?
T
0:07
emacs
274 pts/1 R
0:00
ps
…
Spring 2014
bash
ps –f
UID – Owning user.
PID – Process ID (used in command “kill”).
PPID – Parent process ID.
STIME – When the task started.
TTY – Controlling terminal or running from a shell.
STAT – State. S = Shell is suspended.
T = Running, but suspended.
R = Running.
TIME – CPU time used so far.
CMD – Command running.
PID – Process ID (used in command “kill”).
TTY – Controlling terminal or running from a shell.
STAT – State. S = Shell is suspended.
T = Running, but suspended.
R = Running.
TIME – CPU time used so far.
COMMAND – Command running.
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
15
Section 6 Kernel Scheduling
Process Scheduling
Scheduler responsible for best utilizing the processor time by deciding
which processor to run next from a set of runnable processes.
Scheduling gives impression that multiple processes are executing
concurrently.
Multitasking operating systems has two options:
Preemptive multitasking.
Process involuntary suspended.
Scheduler decides when process is context switched through time
slice.
Scheduler manages the time slice, prevents process monopolizing
CPU.
Interrupts will cause context switch.
Cooperative multitasking.
Process must voluntarily suspend (i.e. driver’s responsibility).
Scheduler does not decide when process is switched.
Process can monopolize CPU, hang the system.
Group Scheduling by userid or groups of processes to not starve
processes.
Real time systems are multitasked with key activities taking a greater share
of process time.
Spring 2014
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
16
Section 6 Kernel Scheduling
Scheduling Policy
Objectives: Set of rules determining when and how a
process is to run.
Fast process response time, good throughput background jobs, avoid
process starvation, reconcilitate low and high priority processes.
Time sharing principle based on timer interrupts.
Each process has time slice or quantum. When quantum expires,
context switch occurs (process appear to run concurrently).
Epoch is time when all runnable processes has exceeded
their quantum.
Timer interrupts used by Linux to measure process quantum.
Quantum Linux 2.4: 210ms, Linux 2.6: 100ms.
Linux dynamically changes process priority.
Priority adjusted higher for releasing CPU before quantum (I/Obound process).
Priority adjusted lower for using entire quantum (CPU-bound
process).
Process dynamically changes its own priority: nice() and setpriority().
Spring 2014
Device driver executing I/O and expects to take a long time.
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
17
Section 6 Kernel Scheduling
Scheduling Policy
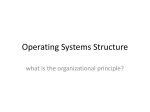
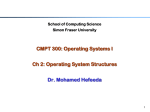
Scheduling Algorithmn
epoch
Process_2
Process_3
Quantum_2
Quantum_3
Process_3
Process_1
Quantum_3
Process_1
Process_1
Quantum_1
Quantum_1
Quantum_1
o Epoch is division of CPU time or a period of time
o Every process has a maximum time quantum computed at beginning of each
epoch.
o When process waiting for I/O its quantum suspended and can be used again in the
epoch until its fully used.
o Epoch ends when all runnable processes have used all of their quantum.
Spring 2014
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
18
Section 6 Kernel Scheduling
Scheduling Policy
Process Priority
Static priorities: Real Time processes. Range 1 to 99.
Always higher than dynamic priority of other processes.
Dynamic priorities: Other processes. I/O and CPU bound
based on time used. Sum of the base time quantum and the
number of “clock ticks” left in the current epoch.
I/O-bound priority bonus ( -5 ).
CPU-bound priority bonus ( +5 ).
Process Quantum
Process assigned at least base time quantum.
Process does not use its entire quantum, bonus calculated
from unused quantum carried over into the next epoch.
Spring 2014
Increased quantum used to calculate priority in next epoch.
When a new child process is created, the parent’s quantum
is split in two halves, one for the parent and one for the child.
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
19
Section 6 Kernel Scheduling
Scheduling Policy
Process Priority
Normal process static priority range 100 – 139
New process inherits static priority of its parent.
Dynamic priorities: Process either I/O and CPU bound based
on time used or the average sleep time.
Real-Time process static priority range 1 – 99.
Spring 2014
Used by scheduler to select the next process to run.
Max(100, min (static priority – bonus + 5, 139))
Bonus determined by the average sleep time.
Sleep 0-99 msec,
bonus = 0.
Sleep 100-199 msec,
bonus = 1.
…
Sleep 900-1000 msec,
bonus = 10
.Highest process priority: max( 100, min( 100-10+5, 139 ) ) = 100.
Lowest process priority: max( 100, min( 100-0+5, 139 ) ) = 139.
CPU-bound priority bonus ( static priority – 0 + 5 ) is +5.
I/O-bound priority bonus ( static priority – 10 + 5 ) is -5.
Always higher than dynamic priority of normal processes.
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
20
Section 6 Kernel Scheduling
Scheduling Policy
Process Classification: Interactive Process.
Interactive processes are I/O-bound, spending a lot of
time waiting for I/O operations.
Interactive processes waiting for human input.
Response time must be quick (latency 50-150ms).
Command shells, text editors, graphical
applications, mouse and keyboard processes.
Processes heavily utilizing I/O (i.e. hard drive, CD).
Spring 2014
I/O bound process “blocked”, pending arrival of data, will
receive interrupt when data has arrived and continue.
Higher priority access to CPU.
Scheduled multiple times within epoch. CPU released
before quantum completes.
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
21
Section 6 Kernel Scheduling
Scheduling Policy
Process Classification: Batch Processes.
Batch processes are CPU-bound, heavily ultilize CPU
time for computations.
Batch processes typically executing in background,
i.e. compilers, database search engines, and
scientific computiations.
No user interactions.
Lower priority access to CPU.
Preempted by I/O-bound process.
Scheduled less than I/O-bound process within
epoch. CPU usually ultilized up to quantum.
Spring 2014
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
22
Section 6 Kernel Scheduling
Scheduling Policy
Process Classification: Real-time Processes.
Real-time processes highest priority, always higher
than I/O or Batch processes.
“Hard” real-time require bounded response time
(absolute deadline must be meet to guarantee
deterministic behavior).
Linux is “soft” real-time. Allows time tolerance
when event occurs in effort to minimize latency.
Internal latency cannot guarantee deterministic
behavior.
Streaming video/audio, robot controllers, programs
collecting data from physical sensors.
Spring 2014
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
23
Section 6 Kernel Scheduling
Linux 2.6 Scheduler Algorithm
Runqueues
Keep track of all runnable tasks for a CPU.
Two priority arrays, active and expired array.
Tasks at same priority are RR scheduled
Dynamic priority changes based on CPU usage.
Special threads: idle thread and migration thread.
runqueue structure
Spring 2014
*curr: Pointer to the currently running task.
*idle: Pointer to the CPU’s idle task.
cpu_load: CPU load info used by Migration thread to balance CPU
loads by scheduling threads to other CPUs.
*active: Pointer to active priority array containing tasks with unexpired
quantums.
*expired: Pointer to expired priority array containing tasks with used up
quantums.
arrays[]: Actual active and expired priority arrays.
*migration_thread: Thread that handles task migrations. Every 200 ms,
checks to see whether the CPU loads are unbalanced.
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
24
Section 6 Kernel Scheduling
Linux 2.6 Scheduler Algorithm
Priority Queues
Priority arrays are the data structure that provide O(1)
scheduling.
140 priority levels. Lower the value, higher the priority.
Two priority-ordered arrays (active and expired) per CPU
managed by runqueue structure.
Active/Expired Array elements linked list of task_structs.
queue structure.
Spring 2014
Transition between active and expired handled by moving pointers
in runqueue structure.
When each task's quantum reaches zero, its quantum is
recalculated before it is moved to the expired array.
Multiple tasks at same priority scheduled round robin.
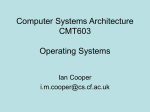
bitmap[]: Bitmap represents the priorities for which active tasks
exist in the priority array.
*list_head_queue[]: Array of linked lists. One list in the array for
each priority level (140 priority levels).
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
25
Section 6 Kernel Scheduling
Linux 2.6 Scheduler Algorithm
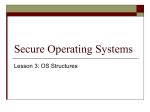
runqueue per CPU.
runqueue
Active
Priority 140
Bitmap
1 0
Task 1
0
Task 2
...
3
2
1
...
0
0
1
...
Task N
Priority: 1
...
Expired
Task 3
Task 4
Task 5
Task 6
Task 7
Task 68
Task M
...
Task Z
Task X
Priority: 140
Priority: 1
Priority: 140
Migration Thread
Spring 2014
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
26
Section 6 Kernel Scheduling
Linux 2.6 Scheduler Algorithm
Linux 2.6.23 CFS (Completely Fair Scheduler)
Fair queuing algorithm.
Aim to maximize overall CPU utilization, especially
interactive performance.
Uses Red-Black tree, instead of runqueues.
Red-Black tree implements “time-line” of future task
execution.
Spent processor time as key, efficiently finding process
with least amount of time (leftmost node).
Nanosecond granularity does not need dynamic +- bonus
priority adjustments.
Choosing process is O(1).
Inserting process is O(log N), because of RB tree.
Spring 2014
Uses same concept of rewarding sleeping or waiting
processes.
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
27
Section 6 Kernel Scheduling
Linux 2.6 Scheduler Algorithm
schedule() Kernel Function
Implements the Linux scheduler, finds a process in the
runqueue and assigns CPU.
Direct Invocation
Lazy Invocation
Spring 2014
Current process is blocking (sleeping), waiting for resource.
Current process state changed to
TASK_INTERRUPTIBLE or
TASK_UNINTERRUPTIBLE and placed in wait queue.
schedule() called.
Resource becomes available, process removed from wait
queue.
Device driver checks for long iterations, and schedules if too
long.
Current process used up its quantum.
Process added to the runqueue with higher priority than
currently executing process (i.e. wake_up_process()).
Process calls sched_yield() to release CPU.
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
28
Section 6 Kernel Scheduling
Linux 2.6 Scheduler Algorithm
schedule() Kernel Function
Handles Linux internal “ housekeeping” tasks (i.e.
accounting, maintaining system uptime).
Scans the runqueue for highest priority process.
If all processes used up quantum, start new epoch.
Assign new quantum for all processes.
Found process with higher priority than current process.
Scheduler performs context switch.
Spring 2014
Real-time process: Current process state is
SCHED_RR and quantum used up, provide new
quantum and place at end of runqueue.
No runnable process in runqueue, for multi-processor
system, attempt load balancing.
Interrupt handler bottom-half processing.
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
29
Section 6 Kernel Scheduling
Linux 2.6 Scheduler Algorithm
Scheduling Classes
SCHED_FIFO: Real-time FIFO scheduling preempts other
processes. Does not have quantum. Runs until:
SCHED_RR: Real-time RR scheduling similar with
SCHED_FIFO, but with quantums and can be preempted by
SCHED_FIFO process.
SCHED_NORMAL: Conventional time-shared process. NonRealtime.
SCHED_BATCH: Similar to SCHED_NORMAL, but process
cannot be considered interactive process (quantum stays the
same).
Spring 2014
Process completes.
Blocked by an I/O call.
Higher priority SCHED_FIFO process becomes runnable.
sched_yield() system calls.
Group scheduling reserves minimum time for other processes
(prevent FIFO process locking CPU).
Always background process (i.e. tape backup process).
SILICON VALLEY UNIVERSITY
CONFIDENTIAL
30