Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Solar micro-inverter wikipedia , lookup
Opto-isolator wikipedia , lookup
Electric motor wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Induction motor wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
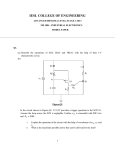
‘Iole o Mãnoa Mouse of Mãnoa Team Members Jeff Fines Designer, Fabricator, Programmer & Thomas Matsushima Designer, Fabricator, Programmer Overview We will be designing and fabricating small robotic mouse. The mouse will be programmed to find the center of a 16 x 16 maze. The Chassis We have: • Shaped a base with enough area to hold the mouse components and the ability to easily traverse diagonally through the maze. • Ordered necessary parts. • Decided to use bipolar motor steppers. • Cut metal attachments which will be used to screw down the stepper motors and sensors. • Decided on placement of sensors Solving Algorithm We have decided to implement the “FloodFill” method for navigating through the maze. Where the center cells are is Cell 0, the four cells around that are initially Cell 1, and so on for a total of thirteen layers of cells. From Cell 13 the mouse will move by choosing the cell closer to the center, i.e. moving from Cell 13 to Cell 12. Mouse Modules • Mouse Brain Module • Chassis Module – Microcontroller – Programming Solving Algorithms Tracking Algorithm • Sensor Module – Physical Sensors – Analog to Digital Converter • Motor Module – Motor Circuit – Motor Logic Controller • Power Module – Power Supply – Power Converter – Motor Mounts – Sensor Mounts – Base Motor Module Using Bipolar motors, H-Bridges, inverters, and Mosfets. We will be able to produce a micro-stepping mouse. Motor Circuit Schematic H-Bridges are necessary to control the Bipolar motor because we have to reverse voltage through the coil to properly control the motor. Logic Circuit Schematic The Inverter will allow us to control the mouse to control each motor using only two inputs and to micro-step using only four. Mosfets are used to remove power to HBridges to allow micro-stepping. Tasks Remaining • • • • Assemble and Test Circuit Finalize Circuit Placement Integrate Circuitry with Chassis Programming Potential Problems • Sensor Issues – Ambient Light Interference – Calibration Error • Programming Issues – Code Errors – Hardware/Software Implementation Errors • Time – Not Enough Deliverable Goals We will design and fabricate a micromouse that can consistently and quickly navigate to the center of a maze. Schedule s