Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Gravity Probe B:
Instrument and Data Reduction
Mac Keiser
SLAC Summer Institute
July 25, 2005
1
Topics
Design of Gravity Probe B Payload and
Spacecraft
On-Orbit Performance
Data Reduction
2
Gravity Probe B
Design Challenges
1.
Design a gyroscope where the drift rate due to
classical torques is less than 0.3 mas/yr.
Measure the gyroscope spin axis orientation relative to
a metrology reference frame to an accuracy of 1 mas
in 5 hr.
2.
•
•
3.
Determine the orientation of the metrology reference
frame relative to distant inertial space to an accuracy
of better than 0.15 mas/yr.
•
•
4.
Noise
Calibration
Measure metrology reference frame relative to guide star
Measure proper motion of guide star
Ensure than there are numerous cross checks for that
may be used to eliminate potential systematic errors.
3
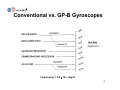
Conventional vs. GP-B Gyroscopes
1 marcsec/yr = 3.2 × 10-11 deg/hr
4
Performance Improvements
Classical Torques
Support Dependent Torques
−
Reduce the Forces Required to Support the Rotor.
•
•
•
−
−
Place the Gyroscope in a Satellite – 10-8 g.
Use Drag-Free Control For the Satellite – 10-11g .
Carefully Select the Orbit to Reduce the Effects of Gradients
in the Earth’s Gravitation Field 10-11g.
Improve the Sphericity and Mass Unbalance of the Rotor <
25 nm.
Choose the Appropriate Spin Speed – 60 -180 Hz
Support-Independent Torques
–
–
–
Residual Gas Pressure < 3 x 10-10 Torr
Electric Charge on the Rotor < 15 nC
Residual Magnetic Field < 10 µG
5
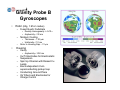
Gravity Probe B
Gyroscopes
•
Rotor (63g, 1.91cm radius)
– Fused Quartz Substrate
• Density Homogeneity < 4×10-6
• Asphericity < 30 nm
– Niobium Coating
–
•
• Thickness – 1.25 µm
• Uniformity < 10 nm
Rotor to Housing Gap – 31 µm
Housing
– Cavity
• Asphericity < 250 nm
– Cu/Ti Electrodes for Electrostatic
Suspension
– Spin Up Channel with Raised Cu
Lands
– Electrodeposited 4 turn
superconducting pickup loop
– Conducting Ground Plane
– UV Fibers and Electrodes for
Charge Control
6
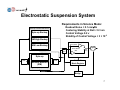
Electrostatic Suspension System
Requirements in Science Mode:
Readout Noise < 0.1 nm/√Hz
Centering Stability at Roll < 0.3 nm
Control Voltage 0.2 v
Stability of Control Voltage < 3 × 10-5
Backup Controller Electronics
Spin-up Backup
SM High Backup
Multi-Level Amplifier
Spinup (750V)
SM Low Backup
Gyro
Switch
Science Mission
(45V)
4kV
relay
Spin-up
A/D
G
F
A
B
Science Mission
(SM)
G
F
A
B
D/A
Arbiter &
Mode Register
Flight Computer (RAD6000)
Bridge
7
Gyroscope
Readout
•
London Moment of a
Spinning Superconductor
– Aligned with
Instantaneous Spin Axis
•
•
•
4 Turn Pickup Loop
Superconducting Cable
DC SQUID and SQUID
Readout Electronics
– Noise < 190 mas/√Hz at
Satellite Roll Period
•
Superconducting
Magnetic Shields
– Residual Magnetic Field
< 9 µGauss
– Attenuation of External
Magnetic Fields > 2 1012
“SQUID”
1 marc-s in 5 hours
8
Telescope
Dimensions:
Physical length
0.33 m
Focal length
3.81 m
Aperture
0.14 m
Properties:
Field of View
1 arc min
Strehl Ratio(695nm) 30%
Noise
50 mas/√Hz
9
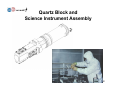
Quartz Block and
Science Instrument Assembly
10
Low Temperature Probe
Sintered Titanium Cryopump
11
Liquid Helium Dewar
• Dewar Capacity 2300 L Superfluid He
• Boil-Off Gas Used for Proportional
Thrusters
Low Field Technology
• flux = field x area
• successive expansions give
stable field levels ~10-7 gauss
•10-12 [ =120 dB! ] ac
shielding through
combination of cryoperm,
lead bag, local
superconducting shields &
symmetry
12
Spacecraft
• 16 Helium gas thrusters, 0-10 mN ea,
for fine 6 DOF control.
• Mass trim to tune moments of inertia.
• Roll star sensors for fine pointing.
• Dual transponders for TDRSS and
ground station communications.
• Modified GPS receiver for precise
positioning and timing information.
• Laser ranging corner cube is a backup
and cross-check for orbit determination.
13
Topics
9 Design of Payload and Spacecraft
– Classical Torques are Significantly Smaller than
the Relativisitic Effects
– Gyroscope and Telescope Readouts are Possess
Sufficient Resolution and Signal-to-Noise
– Carefully Controlled Environment
On-Orbit Performance
Data Reduction
14
Launch
April 20, 2004, 9:57 am PDT
•
•
Boeing Delta II Rocket from
Vanderburg Airforce Base
One Second Launch Window
– Target Orbit – Polar with Guide
Star in Plane of Orbit to within
0.0250
– Provisions Made to Adjust
Orbit with Helium Thrusters
•
•
Launched to the South Over
the Pacific
Within 1 hour, Cameras
Attached to Second Stage
Showed All Four Solar Arrays
Fully Deployed
15
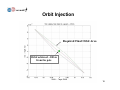
Orbit Injection
Required Final Orbit Area
x
Orbit achieved ~100 m
from the pole
16
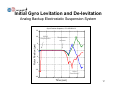
Initial Gyro Levitation and De-levitation
Analog Backup Electrostatic Suspension System
Gyro2 Position Snapshot, VT=135835310.3
30
Initial
suspension
Pos (µm)
Rotor Position
(µm)
20
Suspension
release
10
0
-10
-20
-30
Gyro
“bouncing”
-40
0
2
4
6
Time (sec)
Time (sec)
8
10
12
17
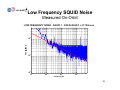
Low Frequency SQUID Noise
Measured On-Orbit
LOW FREQUENCY NOISE - SQUID 1 - 5/23/04 0945 Z + 21.75 Hours
-4
0
PSD (Φ /√ Hz)
10
-5
10
-6
10 -4
10
10
-3
-2
10
10
-1
frequency (Hz)
18
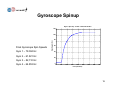
Gyroscope Spinup
Gyro 4 Spin-Up - 7/13/04 - 2004:195:20:00 Z
120
100
Final Gyroscope Spin Speeds
Gyro 1 – 79.394 Hz
Spin Speed (Hz)
80
60
40
Gyro 2 – 61.821 Hz
20
Gyro 3 – 82,110 Hz
Gyro 4 – 64.853 Hz
0
0
50
100
250
200
150
time (minutes)
300
350
400
19
Low Temperature Bakeout and
Gyroscope Spin-Down Rate
Low Temperature Bakeout
Gyroscope Spin Down Time Constant (yr)
Gyro #1
Gyro #2
Gyro #3
Gyro #4
before bakeout
after bakeout
~ 50
~ 40
~ 40
~ 40
15,800
13,400
7,000
25,700
Demonstrates pressure
less than ~1.5 x 10-11 torr
20
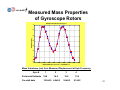
Measured Mass Properties
of Gyroscope Rotors
Sample Polhode Period, Gyro 1
7
6
Amplitude (nm)
5
4
3
2
1
0
0
20
140
120
100
80
60
40
Elapsed Minutes since Vt = 147228407.1 s
180
160
Mass Unbalance (nm) from Measured Displacement at Spin Frequency
Gyro #
1
2
3
4
Prelaunch Estimate
18.8
14.5
16.8
13.5
On-orbit data
10.5±0.5 6.9±0.2
5.6±0.2
9.1±0.2
21
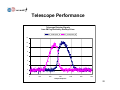
Telescope Performance
Telescope Detector Signals
from IM Peg Divided by Rooftop Prism
ST_SciSlopePX_B
ST_SciSlopeMX_B
14
12
10
8
6
4
2
0
-2
0
100
200
300
400
500
600
Sample Sequence
22
Transverse Acceleration
with Drag-Free Control
Proportional thruster
He boil off gas – Reynolds number ~ 10 !!
Drag-free control effort and residual gyroscope acceleration (2004/239-333)
10
-7
Gyro CE inertial
SV CE inertial
Control Effort (g)
Accel (g)
10
10
10
10
10
Thruster
Force
-8
-9
-10
Residual gyro
acceleration
-11
-12
10
-4
-3
-2
10
10
Frequency (Hz)
10
-1
10
Demonstrated accelerometer (drag free) performance better than 10-11 g DC to 1 Hz 23
0
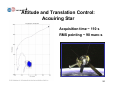
Attitude and Translation Control:
Acquiring Star
Acquisition time ~ 110 s
RMS pointing ~ 90 marc-s
24
Topics
9Gravity Probe B Payload and Spacecraft
9On-Orbit Performance
Gravity Probe B is working as Planned
Data Reduction
25
Schematic Diagram of
Science Instrument
Assembly
☼
Roll Star
Reference
Quartz Block
Gyro SQUID
Telescope
Roll –
1 to 3 minutes
☼
HR8703
(IM PEG)
Gyro Electronics
Telescope
Electronics
26
Pointing Dither and Stellar Aberration
Dither -- Slow 30 marc-s oscillations injected into pointing system
{
gyro output
telescope output
scale factors matched for accurate subtraction
Aberration -- Nature's calibrating signal for gyro readout
Orbital motion
varying apparent position of star
(vorbit/c + special relativity correction)
Earth around Sun -- 20.4958 arc-s @ 1 year period
S/V around Earth -- 5.1856 arc-s @ 97.5 min period
Continuous accurate calibration
of GP-B experiment
27
Gyroscope and Telescope Readouts
Orbit 5786 (of 6736 as of 12:00 N GMT 7/21/05)
Gyroscope 4 Signal, May 18, 2005
1
Volts
0.5
0
-0.5
-1
70
80
90
100
110
120
130
Telescope Y-Axis Pointing Error, May 18, 2005
Dimensionless
1
0.5
0
-0.5
-1
70
80
90
100
Time (min)
110
120
130
28
Combined Gyroscope 4 and Telescope Signals, May 18, 2005
1
0.8
0.6
0.4
0.2
Volts
Combined
Gyroscope
and Telescope
Signals
0
Measurements:
-0.2
z – Combined gyroscope and
-0.4
telescope signals
φr – Measured satellite roll phase
-0.6
ANS, AWE – North-South and West-East
-0.8
Components of Stellar Aberration
Parameters:
-1
70
80
90
100
Time (min)
110
120
130
NS, WE – North-South and West-East
Orientation of Gyroscope Spin Axis
Cg – Gyroscope Readout Scale Factor
z = C g [( NS + ANS ) cos(φr + δφ ) + (WE + AWE ) sin(φr + δφ )] + b
δφ - Roll Phase Offset, angle between
measured roll phase and normal to
pickup loop
b - bias
29
Three Phases of In-Flight Verification
A. Initial orbit checkout (121 days)
– re-verification of all ground calibrations [scale factors,
tempco’s etc.]
– disturbance measurements on gyros at low spin
speed
B. Science Phase (~ 11+ months)
– exploiting the built-in checks [Nature's helpful
variations]
C. Post-experiment tests (~ 3 weeks)
– refined calibrations through deliberate enhancement
of disturbances, etc. […learning the lesson from
Cavendish]
30
Five Modes of Verification
• A heavily instrumented payload and
spacecraft
• Redundancy – with variation
• Built-in calibrations/natural variations
• Error enhancement
• End-around checks
31
Proper Motion of Guide Star
• Guide Star, HR 8703
• Declination, 16.840
• Visual Brightness, 5.7
• Radio Source
– 0.5 to 40 mJy
1 Jy
=10-26
Very Large Array, Socorro, New Mexico
W/(m2Hz)
Preliminary HR 8703 Positions for Peak of Radio Brightness
Solar System Barycentric, J2000 Coordinate System
• VLBI Measurements of
Proper Motion
15.0 Dec 91
500
22.4 June 93
450
13.2 Sept 93
24.3 July 94
400
o
Declination - 16 50' 28'' (mas)
• Harvard -Smithsonian
Center for Astrophysics
and York University
• 4 VLBI Observations per
year
• 1991 through 2005
550
16.9 Jan 97
18.9 Jan 97
21.9 Dec 97
30.0 Nov 97
27.9 Dec 97
1.8 Mar 98
8.4 Aug 98
12.5 Jul 98
17.3 Sept 98
13.8 Mar 99
350
19.3 Sept. 99
15.6 May 99
15.6 May 00
10.0 Dec 99
300
6.1 Nov 00
7.3 Aug 00
7.1 Nov 00
20.2 Oct 01
29.5 June 01
22.0 Dec 01
250
14.7 Apr 02
32700
32650
32600
32550
32500
(Right Ascension - 22h53m) x 15 cos(Dec) (mas)
32
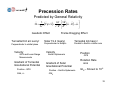
Precession Rates
Predicted by General Relativity
G
G
GI
3 G
Ω = 2 ∇φ × v + 2 3
c R
2c
(
)
Geodetic Effect
G
⎡ 3R G G G ⎤
⎢ 2 ωe ⋅ R − ωe ⎥
⎦
⎣R
(
)
Frame Dragging Effect
Terrestial 6.6 arc sec/yr
Solar 19.2 mas/yr
Terrestial 42 mas/yr
Perpendicular to orbital plane
Perpendicular to Ecliptic
Parallel to Earth’s rotation axis
Velocity
GPS and Lunar Range
Meaurements
Gradient of Terrestial
Gravitational Potential
Velocity
Earth’s Ephemeris
Position
GPS
Rotation Rate
Gradient of Solar
Gravitational Potential
Position - GPS
Position – Earth’s Ephemeris
GME, J2
GMS
IERS
GIE – Known to 10-6
33
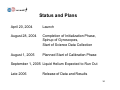
Status and Plans
April 20, 2004
Launch
August 28, 2004
Completion of Initialization Phase,
Spinup of Gyroscopes,
Start of Science Data Collection
August 1, 2005
Planned Start of Calibration Phase
September 1, 2005 Liquid Helium Expected to Run Out
Late 2006
Release of Data and Results
34
35