Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
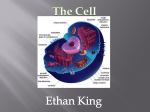
Proceedings of the 27th Chinese Control Conference July 16-18, 2008, Kunming,Yunnan, China Wireless Monitoring System of Vehicle Overspeed on Freeway Based on GPRS Ma Zengqiang1,3, Gao Guosheng2, Song Wanmin3, Yan Yan3 1. School of Mechanical and Electronic Control Engineering, Beijing Jiaotong University, Beijing 100044, P. R. China E-mail: mzqlunwen @126.com 2. Office of Scientific Research, Shijiazhuang Railway Institute, Shijiazhuang 050043, P. R. China [email protected] 3. School of Electrical and Electronic Engineering, Shijiazhuang Railway Institute, Shijiazhuang 050043, P. R. China E-mail: [email protected] , [email protected] Abstract: Vehicle overspeed is an important reason for the traffic accident on the freeway and it is helpful and necessary to monitor the peccancy behavior of over speed. In this paper, design method of the overspeed wireless monitoring system based on GPRS (General Packet Radio System) is discussed, and the configuration of its hardware and software is introduced. The whole system consists of the subsystems of the vehicle overspeed monitoring stations that are distributed on the free- way and the remote control center. As the over speed action is detected, two images will be captured, analyzed and processed. Then the information of the overspeed vehicle’ speed, peccancy time, peccancy place serial number, compressed image and etc, will be written to the wireless modem of Motorola G20 through the serial interface and sent to the remote monitoring center through the GPRS network and the GGSN gateway. The remote control center is responsible for data displaying and saving. Integrating the technologies of sensor, number plate recognition and GPRS, the whole monitoring system stands up the trend of vehicle overspeed surveillance on freeway. The design and application of the new type of vehicle overspeed monitoring system will undoubtedly improve the automatic and intelligent management on freeway. Key Words: GPRS Technology, Vehicle overspeed, Motoring System, Freeway 1 tment, number plate intellectualized recognition, peccancy information wireless transmission, data query and etc, have been solved. The monitoring system not only can provide the more scientific and more effectual supports for freeway management but also will inevitably be applied as an important subsystem of ITS (Intelligent Transportation Systems).The new monitoring system of vehicle overspeed stands for a certain trend inhe future. INTRODUCTION With the development of the freeway construction, the economy increase has been greatly accelerated and the quality of the traffic service has been enhanced consequently. On the other hand, vehicle overspeed has become one of the most important reasons for the increasing traffic accidents notwithstanding the advantage and convenience brought forth by the freeway. A recent statistics shows that among all of the traffic accidents, 25.1 percent are caused by vehicle overspeed. There is no doubt that it is necessary to monitor the vehicle speed and punish the speeders. But it is the general means to inspect and measure the vehicle speed by point constables. The inefficient means not only can’t realize round-the-clock monitoring but also can’t supervise all sections of a highway. As a result, it is pressing to develop an automatic vehicle overspeed monitoring system to meet the present requirements of automatic and intelligent management on freeway. In this paper, a vehicle overspeed wireless monitoring system based on GPRS is developed with the combined usage of communication, Internet, image processing and other advanced technologies. The new system employs RCM3000 module, which is produced by Z-World Corporation of U.S.A, as a kernel module. The data transfer >@ is implemented by way of GPRS , which has the advantages of wide coverage area, high reliability, low cost and etc. During the development of the new system, several key problems, such as vehicle overspeed judg 2 STUCTURE AND FUNCTIONS OF THE WHOLE MONITORING STATION The monitoring system consists of the vehicle overspeed monitoring stations and the remote control center. The vehicle overspeed monitoring stations are distributed on the freeway and can monitor the vehicles running on one direction carriageway. When the vehicle passes and presses the two piezoelectricity sensors that are laid on the road according certain distance, output signals of the piezoelectricity sensors will be captured by the interrupt management system of the RCM3000 module. Then the speed can be worked out in real time. If the speed exceeds the threshold, two images of the vehicle will be screened as a result. The first Image of close shot is used to recognize the vehicle number plate and the other image of establishing shot is to record the freeway panorama for the peccancy action. Every vehicle overspeed monitoring station has its unique IP address and the data package, which consists of the overspeed vehicle’ speed, peccancy time, peccancy place serial number, compressed image of establishing shot and etc, will be sent to the remote monitoring center through the GPRS network and the GGSN gateway. After being received, the package will be partitioned and * This work is supported by Natural Science Foundation of Hebei under Grant E2006000388. 550 Authorized licensed use limited to: SHANGDONG UNIVERSITY. Downloaded on October 26, 2008 at 22:57 from IEEE Xplore. Restrictions apply. stored respectively into the server of the control center and can be queried by the authorized user. Fig.1 is the whole structural chart of the vehicle overspeed monitoring system. A monitoring station of vehicle overspeed .. . vehicle can be obtained according to the order of the two pulses that produced by S1 and S2 respectively. At the same time, the speed of the wheel, viz. the speed of the vehicle, can be worked out for knowing the time interval of two continuous pulses that produced by the same sensor. When the peccancy of overspeed is judged by comparing with the upper limit speed, current speed, serial number of the monitoring location and the peccancy time will be recorded. The two CCD cameras are set up above the roadway and joined with the control mainbord through coaxial lines. When the CPU of Rabbit 3000 detects the overspeed event, it will drive the cameras to capture two vehicle Images. The first image of close shot is to recognize the vehicle license plate and the other image is to record the freeway panorama for the peccancy action. During the night, the luminance is low but the headlights of the vehicles are dazzling, then the number plate in the image is difficult to be recognized. In order to avoid the inconvenience, the auxiliary lamp-house is set up above the roadway and used to acquire images in the night. RCM3000 triggers the auxiliary lamp-house during the night. The control mainbord, which uses the Rabbit 3000 as the CPU, is the core of the monitoring station. TLC5510 is an 8 bits A/D convert controller of TI Corporation in America. Because the output signals of CCD cameras are analog, TLC5510 is used to convert the analog image to the digital image signals that can be recognized by the RCM3000 module. The converting speed of TLC5510 is 20Mbps and it can meet the need of the image capture. The circuit diagram of RCM3000 and TLC5510 on the control mainboard is shown in Fig.3. GPRS N A monitoring station of vehicle overspeed k GGSN Gateway Internet Control center Fig.1 The whole structural chart of the vehicle overspeed monitoring system based on GPRS 3 HARDWARE SUBSYSTEM DESIGN OF THE OVERSPEED MONITORING STATION Each station consists of two piezoelectricity sensors(S1 and S2), a light sensor, two CCD cameras, an auxiliary lamp and a circuit board for signal regulating and a control mainboard that containing RCM3000 module and wireless modem (Motorola G20). Fig.2 is its structural chart. Vehicle running direction 2m Piezoelectricity sensor 1 Piezoelectricity sensor 2 Signal regulating circuit To the pin of To the pin of INT0 on CPU INT1 on CPU S2 Signal regulating S1 TLC5510 RCM3000 Module D0~D7 D0~D7 PD0 XINT1 WR XINT2 OE RD CLK + To auxiliary lamp Fig.3 Circuit diagram of RCM3000 and TLC5510 on the control mainboard CCD CCD camera0 The control camera 1 After the two images of the peccancy vehicle are acquired, the panorama image will be compressed and number plate will be recognized from the image of close shot. Then the data of the plate number, the speed, the compressed image, the location number, the peccancy time and etc are carried to the wireless modem of G20 through the serial interface by Rabbit 3000 and transmitted to the remote control center through the GPRS network by the G20. The circuit diagram of RCM3000 and Motorola G20 on the control mainboard is shown in Fig.4. Motorola G20 is a wireless modem for GPRS applications, and can offer such services as phonetic call, short message, Data transmission and etc. Motorola G20 has a mainboard Auxiliary lamp Fig.2 The structural chart of the vehicle overspeed monitoring station The two sensors of S1 and S2 are fixed on a roadway according to a settled distance of L. Because the output signal of a sensor, which is produced as a vehicle wheel passing the sensor, is mixed with many kinds of disturbing signals, it must be filtered and adjusted by the regulation circuit. Then it will be accurately recognized by interrupt pin of the Rabbit 3000. In the interrupt service routine of Rabbit 3000, progressing direction of the 551 Authorized licensed use limited to: SHANGDONG UNIVERSITY. Downloaded on October 26, 2008 at 22:57 from IEEE Xplore. Restrictions apply. great deal of interface port to connect with power supply, LCD, SIM card, charger, earphone, microphone and other special peripheral equipment. The RCM3000 drives the Motorola G20 through the serial interface to realize connection establishing, data transmitting and etc. The data-sending rate of Motorola G20 is 13.4kbits/s, and data downloading rate is 26.8kbits/s. I/O on/off/IGN TXD TXD RXD RXD RTS RTS CTS CTS CTR RCM3000 DTR DSR Module Motorola DSR DCD DCD G20 RI RI SIM VCC SIM VCC SIM Reset SIM Reset SIM Clock SIM Clock SIM PD SIM PD SIMCard SIM I_O SIM I_O GROUD GROUD Fig.4 Circuit diagram of RCM3000 and Motorola G20 on the control mainboard The data package, which consists of the overspeed vehicle’ speed, peccancy time, peccancy place serial number, compressed image of establishing shot and etc, will be written into the wireless modem (Motorola G20) through the serial port of RCM3000 and then transported to the server of the control center by GPRS network.. After being received, the package will be partitioned and stored respectively into the server of the control center and the staffers in the control center display and print these important data and monitor the state of the vehicle peccancy action of overspeed on freeway. 4 4.1 Subsystem Initialization Dynamic C language is the software developing platform for the remote overspeed monitoring station, and it is a software designing tool for RCM3000 modules produced by the Z-World Company of United State. Dynamic C is a programming system extended from the C language and it is suitable for the embedded software design. The main functions of the subsystem initialization module include Rabbit 3000 initialization, Motorola G20 initialization, logging in GGSN gateway and etc. z The Rabbit 3000 initialization module mainly includes the initialization of the timer, the interrupt management, the serial communication in Rabbit 3000 and etc. z The initialization of G20 is implemented by RCM3000 with AT˄Attention Command˅ instructions, including baud rate setting and GGSN connection through serial port. z The logging in module is to drive G20 to connect the GGSN gateway. The process can be separated into three stages: establishing stage, authenticating stage and negotiating stage. The communicating course between G20 and GGSN follows the PPP protocol[2] and has been described in Fig. 6. GPRS gateway sends PAP REQ signal Refuse all setting operation, and require PAP authentication LCP negotiation Gateway agrees on PAP authentication Q2403A sends user name and password SOFTWARE SUBSYSTEM DESIGN OF THE OVERSPEED MONITORING STATION PAP authentication Distributing IP to Q2403A Completing GPRS gateway validation Fig.5 provides the structural chart of Software subsystem of the overspeed monitoring station. IPCP stage Three times of handshake complete monitoring station subsystem Fig.6 Flow chart of Q2403A to log in GGSN Communication management Number plate recognition Image acquisition Vehicle overspeed judgment Subsystem initialization PPP protocol provides a set of schemes, mainly based on the protocols of LCP (Link Control Protocol), PAP (Password Authentication Protocol) and IPCP (Internet Protocol Control Protocol), to solve such problems as chain establishing, maintaining, removing and upper protocol negotiating, authenticating, and etc. Once the negotiating course ends, the establishment of PPP chain is completed and a dynamic IP has been distributed to each G20. Then the speed monitoring station can transport IP package to the remote control center, abiding by the criterion that has been negotiated. Fig.5 The structural chart of the overspeed monitoring station software system 4.2 Overspeed judgment Overspeed judgment is to gain the speed of each wheel and compare with the upper limit of the speed. The speed of passing vehicle can be worked out for knowing 552 Authorized licensed use limited to: SHANGDONG UNIVERSITY. Downloaded on October 26, 2008 at 22:57 from IEEE Xplore. Restrictions apply. z Communication managing module divides the IP packages, which are transported from the remote monitoring stations through the GPRS network, and extract serial number of the data package, the symbol of the SIM card, and the measured speed data from each package. z Data displaying module intuitively shows the characters of speed signal with three-dimensional cartoon form. z Data storing module saves the speed message, which is extracted from IP package, into the database. z Data querying module permits the authorized user to query the historical data. Fig. 8 shows the main window of the chart of Software subsystem of the control center. the time interval of two continuous pulses that produced from the two sensors (S1 and S2) respectively triggered by the same wheel.. The calculation of speed and overspeed judgment will be implemented during the executing course of the external interrupt service routine that triggered by the output signals. 4.3 Image acquisition As RCM3000 detects the peccancy action of overpeed, it will trigger two CCD cameras to capture two vehicle Images. The first Image of close shot is to recognize the vehicle license plate and the other image of establishing shot is to record the freeway panorama for the peccancy action. During the night, when RCM3000 find the luminance is lower to the need with acquiring the output signal of the optical sensor, the auxiliary lamp-house is start up and can enhance luminance of the whole image. 4.4 Number plate recognition From the plate image of close shot, we use certain image processing technologies, for example, plate location, Character segmentation, plate obliquity detection and rectification, region labeling, etc to recognize each character in the number plate[3]. 4.5 Data communication and management Communication management module binds up SIM card symbol and measured data into an IP package and sends it to the remote control center through the GPRS network. 5 Fig.8 The main window of the chart of Software in the control center 6 DESIGN OF THE MONITORING CENTER CONCLUSION Speed is a very important parameter in the freeway safety management system, and is a primary technical specification, which is widely regarded in such different fields as bridge vibration state monitoring, railway intersection monitoring, railway station automatic management and etc. In this paper, the wireless monitoring system of vehicle over speed based on RCM3000 realizes the remote speed monitoring, employing such advantages of the GPRS network as widely covering, high reliability, low cost and so on. This new monitoring system has well foreground and practical significance. The scheme also applies to other kinds of monitoring domain such as sea, weather, geology and etc, where is unfit for constructing lineate monitoring network. The control center uses VC++6.0 as the software development platform and adopt Microsoft Sever 2000 as the server. The main function of control center is to receive, display and print the data sent from remote monitoring stations. Its software system includes several modules such as communication managing, data displaying, data storing, data querying and etc. Fig. 7 shows the structural chart of the control center software system. Control center subsystem Information query Information storage Information displaying Communication management REFERENCES [1] WU Q P. GPRS Technology and its Applications. Journal of Hehai University, 2002:54-57. [2] GUAN Y D. Research on Embedded single chip Based on PPP Protocol. Electron Technology Applications, 2003(2): 18-21. [3] WANG X H, WANG X G. Improved Approach Based on SVM for License Plate Character Recognition. Journal of Beijing Institute of Technology, 2005(4): 378-381. Fig.7 The structural chart of the control center software system 553 Authorized licensed use limited to: SHANGDONG UNIVERSITY. Downloaded on October 26, 2008 at 22:57 from IEEE Xplore. Restrictions apply.