Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Department of Electrical and
Computer Engineering
EE20A - Electromechanical Energy
Conversion
Induction Machine
Principle of Operation
• The stator coils, when energised, create a
rotating magnetic field.
• Rotating magnetic field cuts through the
rotor inducing a voltage in the rotor bars.
• This voltage creates its own magnetic field
in the rotor.
• The rotor magnetic field will attempt to line
up with the stator magnetic field.
• The stator magnetic field is rotating, the
rotor magnetic field trying to line up with
the stator magnetic field causes the rotor to
rotate.
• The rotor magnetic field, never catches up,
but follows slightly behind.
Motor Analysis
• Slip is the difference between
the speed of the stator magnetic
field and the speed of the rotor
• SLIP,S, = (NS - N) / NS
• When motor is stationary, it
behaves like a transformer
• At a given Speed, flux cutting
rate is reduced => thereby
reducing output voltage by a
factor of the slip.
Analysis
IIN
IO
Vph
RO
I1
Rs
I2 jXr
jXs
INL
a:1
Im
Xm
V1
V2
Per Phase Equivalent Circuit
Rr
Analysis
IIN
IO
Vph
RO
I1
Rs
I2 jXr
jXs
INL
a : 1
Im
Xm
V1
V2
Per Phase Equivalent Circuit
Rr
s
Analysis
IIN
IO
Vph
RO
I1
Rs
jXs
jXr
INL
Im
Xm
Pair gap
Per Phase Equivalent Circuit
Rr
s
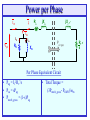
Power per Phase
IIN
IO
Vph
RO
I1
Rs
jXs
jXr
INL
Im
Xm
Pair gap
Per Phase Equivalent Circuit
• Pag = I12Rr`/s
• Pcu = sPag
• Pmech_gross = (1-s)Pag
• Total Torque =
(3Pmech_gross- PF&W)/wm
Rr
s
Power per Phase
I NL Io Im
Pag = Power across the air gap
I1
Vph
R r
Rs
j( Xs X r )
s
R r
Pag I x
s
2
1
Power per Phase
P mech_gross = (1-s) Pag per phase
Cu losses in rotor, Pcu I1 R r
2
Total Torque
Pag I1
2
3 x Pmech_gross - P
F& W
ωm
(1 - s)
R r R r
s
Power per Phase
Pag I1 R r I1
2
Pcu_losses_in_rotor
2
(1 - s)
Rr
s
Pmech_gross
Pag : Pcu : Pmech = 1:s:(1-s)
Power per Phase
Pmech_gross_per_phase (1 - s) I1
2
R r
s
(1 - s) 2
I1 R r
s
Slip is variable and affects only rotor circuit
Ignoring Stator values
I1
Vph
R r
j X r
s
Power per Phase
Pmech_gross I1 R r
2
(1 - s)
s
Vph
2
. R r
(1 - s)
x
2
s
R
r
2
X
r
s
Power per phase
Torque
ωm
ω m 2 n
V
2
. R r
(1 - s)
ph
x
2
2 ns
R
r
2
X
r
s
Torque
2
2
V
.
R
.
s
(1 - s)
ph
r
x
2
2
2ns R
2
r
X r
s
X
r
Simple Algebraic manipulations yield
Tmech_gross
2 R r 2
.s
Vph .
(1 - s)
X r
x
2nsX r R r 2 s 2
X r
Torque
R r
Now let
X r
2
2
(1 - s) Vph . s .
Then we get Tmech_gross
x 2 2
2nsX r s
(1 - s) . Vph 2 s .
x 2 2
2nX r s
Torque
ns - n
But slip, s
ns
n n s (1 - s)
By substituti ng for n we get :
Tmech_gross
Vph
2
s
x 2
2n s X r s 2
Since the above calculations was derives as power per phase,
then the total torque for all three phases would be three times
the gross mechanical torque for each phase calculated above.
Torque
Vph 2
s
Total Torque 3 x
x 2
2
2n s X r s
Let k
3Vph
2
2n s X r
s.
Then Total Torque k . 2
s2
The maximum torque is obtained when:
R r
slip, s
X r
or s
Torque Characteristics
Speed-Torque characteristics
Modifications in the design of the squirrel-cage motors
permit a certain amount of control of the starting current and
torque characteristics.
These designs have been categorised by NEMA Standards
(MG1-1.16) into four main classifications:
1. Normal-torque, normal-starting current motors (Design A)
2. Normal-torque, low-starting current motors (Design B)
3. High-torque, low-starting-current, double-wound-rotor
motors (Design C)
4. High-slip motors (Design D)
Design A Motor
•
•
•
•
•
•
•
Hp range 0.5 – 500 hp.
Starting current 6 to 10 times full-load current.
Good running efficiency (87% - 89%).
Good power factor (87% - 89%).
Low rated slip (3 –5 %).
Starting torque is about 150% of full load torque.
Maximum torque is over 200% but less than 225% of fullload torque.
• Typical applications – constant speed applications where high
starting torque is not needed and high starting torque is tolerated.
Design B Motor
•Hp range – 0.5 to 500 hp
•Higher reactance than the Design A motor, obtained by means of
deep, narrow rotor bars.
•The starting current is held to about 5 times the full-load current.
•This motor allows full-voltage starting.
•The starting torque, slip and efficiency are nearly the same as for
the Design A motor.
•Power factor and maximum torque are little lower than class A,
•Design B is standard in 1 to 250 hp drip-proof motors and in
totally enclosed, fan-cooled motors, up to approximately 100 hp.
•Typical applications – constant speed applications where high
starting torque is not needed and high starting torque is tolerated.
•Unsuitable for applications where there is a high load peak
Design C Motor
•Hp range – 3 to 200 hp
•This type of motor has a "double-layer" or double squirrel-cage
winding.
•It combines high starting torque with low starting current.
•Two windings are applied to the rotor, an outer winding having
high resistance and low reactance and an inner winding having
low resistance and high reactance.
•Operation is such that the reactance of both windings decrease
as rotor frequency decreases and speed increases.
•On starting a much larger induced currents flow in the outer
winding than in the inner winding, because at low rotor speeds
the inner-winding reactance is quite high.
Design C Motor
•As the rotor speed increases, the reactance of the inner winding
drops and combined with the low inner-winding resistance,
permits the major portion of the rotor current to appear in the
inner winding.
•Starting current about 5 times full load current.
•The starting torque is rather high (200% - 250%).
•Full-load torque is the same as that for both A and B designs.
•The maximum torque is lower than the starting torque,
maximum torque (180-225%).
•Typical applications – constant speed loads requiring fairly
high starting torque and lower starting currents.
Design D Motor
•Produces a very high starting torque-approximately 275% of
full-load torque.
•It has low starting current,
•High slip (7-16%),
•Low efficiency.
•Torque changes with load
•Typical applications- used for high inertia loads
The above classification is for squirrel cage induction motor
Wound Rotor
•Hp 0.5 to 5000hp
•Starting torque up to 300%
•Maximum torque 225 to 275% of full load torque
•Starting current may be as low as 1.5 times starting current
•Slip (3 - 50%)
•Power factor high
•Typical applications – for high starting torque loads where very
low starting current is required or where torque must be applied
very gradually and where speed control is needed.
Current Effects on the Motor
•Induction motor current consists of reactive (magnetizing) and
real (torque) components.
•The current component that produces torque (does useful work)
is almost in phase with voltage, and has a high power factor close
to 100%
•The magnetizing current would be purely inductive, except that
the winding has some small resistance, and it lags the voltage by
nearly 90°.
•The magnetizing current has a very low power factor, close to
zero.
•The magnetic field is nearly constant from no load to full load
and beyond, so the magnetizing portion of the total current is
approximately the same for all loads.
•The torque current increases as the load increases
Current Effects on the Motor
•At full load, the torque current is higher than the magnetizing
current.
•For a typical motor, the power factor of the resulting current is
between 85% and 90%.
•As the load is reduced, the torque current decreases, but the
magnetizing current remains about the same so the resulting
current has a lower power factor.
•The smaller the load, the lower the load current and the lower
the power factor. Low power factor at low loading occurs
because the magnetizing remains approximately the same at no
load as at full load
Methods to vary speed of the
Induction Motor
An induction motor is a constant-speed device. Its speed depends on
the number of poles in the stator, assuming that the voltage and
frequency of the supply to the motor remain constant.
•One method is to change the number of poles in the stator,
for example, reconnecting a 4-pole winding so that it
becomes a 2-pole winding will double the speed. This method
can give specific alternate speeds but not gradual speed
changes.
•Another method is to vary the line voltage this method is not
the best since torque is proportional to the square of the
voltage, so reducing the line voltage rapidly reduces the
available torque causing the motor to stall
Methods to vary speed of the
Induction Motor
•Sometimes it is desirable to have a high starting torque or to have
a constant horsepower output over a given speed range. These and
other modifications can be obtained by varying the ratio of voltage
to frequency as required. Some controllers are designed to provide
constant torque up to 60 Hz and constant hp above 60 Hz to
provide higher speeds without overloading the motor.
•An excellent way to vary the speed of a squirrel-cage induction
motor is to vary the frequency of the applied voltage. To maintain
a constant torque, the ratio of voltage to frequency must be kept
constant, so the voltage must be varied simultaneously with the
frequency. Modern adjustable frequency controls perform this
function. At constant torque, the horsepower output increases
directly as the speed increases.
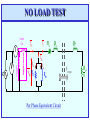
NO LOAD TEST
V
AC
Voltage
Coil
I
Wattmeter
Current
Coil
IIN
I1
IO
Vph RO
Rs
jXs
jXr
INL
Im
Xm
Per Phase Equivalent Circuit
Pair gap
Rr
s
NO LOAD TEST
n - ns = 0
‘No load Speed Synchronous Speed’
i.e. no power transfer which implies that Torque = 0
I1 = 0 &
T=0
E
Power Consumed = Core Losses + Friction &
Windage
Measure Vph , IIN and Wph
R r
s
( Infinite Impedance ) since I1 = 0
NO LOAD TEST
• INL = I0 – jIm
= INL ( cos NL - jsin NL )
• cos NL =
Wph
Vph
• Ro = Vph
I0
INL
Xm = Vph
Im
Lock Rotor Test
V
AC
Voltage
Coil
I
Wattmeter
Current
Coil
IIN
I1
IO
Vph RO
Rs
jXs
jXr
INL
Im
Xm
Pair gap
Rr
s
Lock Rotor Test
• In the Lock Rotor test, No Load Speed, n = 0
Slip, s = ns – 0 = 1,
s=1
ns
• Then Rr Rr
s
•Apply Voltage to Variac, VLR = (10% - 25% ) Vph
• Since INL<< I1
Then INL 0
• Measure values VLR , ILR and WLR
Lock Rotor Test
•Zeq = VLR / ILR
•cos LR=
WLR
VLR
ILR
• Zeq = Zeq {cos LR - jsin LR}
= Zeq cos LR
Rs+ Rr
-
Zeq jsin LR
Xs + Xr
Lock Rotor Test
•At Standstill Under d.c. conditions w = 0
X= wL
X=0
•R1 & R2 can be measured using an ohmmeter over two stator
windings, which gives a value of Rs
• Rr = Zeq cos LR - Rs
STATOR
R1
Ohm
meter
R2
Rs
jXs
ROTOR