Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Brushed DC electric motor wikipedia , lookup
Three-phase electric power wikipedia , lookup
Stray voltage wikipedia , lookup
Power engineering wikipedia , lookup
History of electric power transmission wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Distribution management system wikipedia , lookup
Electric motorsport wikipedia , lookup
Electrification wikipedia , lookup
Buck converter wikipedia , lookup
Opto-isolator wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Power electronics wikipedia , lookup
Voltage optimisation wikipedia , lookup
Stepper motor wikipedia , lookup
Mains electricity wikipedia , lookup
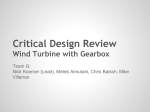
#16 McGill University Formula Hybrid Design Review History The history of the McGill Hybrid Racing Team's 2007 prototype starts in the fall of 2005 when a group of four senior year mechanical engineering undergraduate students were given the task of designing an independent rear wheel drive system for their final design project. The goal of the project was to build a platform which could in the future be used for research into independent continuously variable transmission (CVT) drive systems. The team of four was given two DC motors, two CVTs and the MRT 7 chassis (McGill Racing Team's 2005 entry in the FSAE competition) to work with. Along the way it came to the students' attention that a Formula Hybrid Competition (FHC) was in the works. Thus, the independent rear wheel drive system designed by the students was presented in 2006 at the Formula Hybrid “Demonstration Event”. In the summer of 2006 the initial independent rear wheel drive design was modified to improve robustness. In the fall of 2006, when it became official that a Formula Hybrid competition would take place in 2007, another group of four senior year undergraduate students were given the task of taking the existing platform and transforming it into a Formula Hybrid competition compliant vehicle. The McGill Electric Snowmobile Team agreed to contribute to the team's effort. Goal For this first attempt at designing a hybrid race car, the McGill Hybrid Racing Team's goal is to design a simple and reliable hybrid vehicle on a budget of 1000$ by using the modified MRT 7 platform and the resources of the McGill Electric Snowmobile Team. Hybrid Strategy Following its goal of simplicity and reliability while maximizing the use of available resources, the team opted for a series hybrid design. Furthermore, the existing electric rear wheel drive platform did not allow for a parallel or “full” hybrid configuration without completely changing the design of the vehicle from the ground up. Drivetrain McGill's hybrid vehicle is powered by two Etek DC permanent magnet motors. At 48 volts, each of these pancake style motors has a continuous rating of 8HP and at peak rating of 15HP for 1 minute. Manufacturer's published data claims an efficiency nearing 90% at output powers between 4HP and 9HP. This claim has been verified by dyno testing of the Etek motor on a student built AC dyno. Each motor is coupled to one rear wheel via a CVT and a secondary fixed ratio. The CVTs are belt and pulley style CVTs manufactured by CVTech. The driver pulleys have been modified for use with electric motors. These modified drivers keep the belt permanently engaged to take full advantage of the availability of high torque throughout the electric motor's RPM range. Heavy lead weights are used in order to get the CVT to shift at much lower RPMs (~2000-3000RPM) than it normally would in its original application (ICE snowmobiles). The minimum ratio of the CVT is 0.326 (step-down) and the maximum ratio is 1.762 (overdrive). The team has build a CVT testing adapter for the AC dyno in order to correctly tune the CVT’s for use with electric motors. Furthermore, the CVT’s used in the hybrid race car went through “real life” testing and tuning even in the middle of the snowy winter here in Quebec. The test beds used for this were an electric and a hybrid snowmobile prototype. The secondary ratio is a 3.75:1 step down ratio which connects each CVT's driven pulley to its respective rear wheel half-shaft. Each step down ratio is composed of a 12 teeth sprocket, a 45 teeth sprocket and an ANSI 41 chain. The entire drive system is symmetrical relative to the vehicle's longitudinal axis. This is possible due to the fact that the team carefully selected bi-directional motors and CVT pulleys thus allowing it to mirror image both sides of the drive system along the vehicle’s centerline. All drive components are as close to the vehicle's under tray as possible in order to keep the center of gravity as low as possible. Accumulators The accumulators selected by the team are high power lithium ion cells. The complete pack of accumulators is composed of a series string of 20 HP-602050 cells from Lithium Technology Corporation. Each cell has a nominal voltage of 3.6V and an available capacity of 45AH at C/5 discharge rate. The accumulators are divided into two 36V packs each located in one of the vehicle's side pods. Each pack weights 20kg and is assembled by nesting the top and the bottom of the cylindrical cells in Delrin headers through which the high power connections between cells are routed. The accumulators are technically capable of providing up to 270 amps of current for a prolonged period of time and 500 amps of current for 10 seconds. However, for efficiency and reliability reasons, the team limits the maximum current draw to 200 amps. This fixes the maximum power output of the battery pack near 20HP. The batteries can be charged at a rate of up to 2C (90A) with 15 seconds pulses of up to 6C (270A). The cells have been extensively tested in both electric and hybrid snowmobile test beds during the winter season and have so far live up to all of the manufacturer’s claims. The team was unable to fully test the batteries in the car (there's actually still snow outside) this spring however, testing performed with the electric snowmobile prototype equipped with the hybrid race car's battery pack showed that it was able to travel 10.9 miles on a single charge. Generator The 2007 hybrid prototype's generator is based on Robin Subaru's EX-21, 7HP, 4-stroke, single cylinder industrial engine. The EX-21 can produce a maximum of 14Nm of torque at 2800RPM, 13Nm at 3600RPM and 12,25Nm at 4000RPM. The engine's output shaft is connected to a Perm PMG 132 DC permanent magnet motor via a flexible gear and sleeve coupler which dampens the shock loads inherent to single cylinder engines. The initial design used a rigid gear and sleeve coupler which damaged the motor's shaft. The team then tested the use of a spider coupler to dampen the load: the coupler's spider was wearing down alarmingly fast. Finally a gear and sleeve (reinforced neoprene) coupler was installed and gave the required balance of strength and shock absorption. So far neither the coupler or the shafts have shown any noticeable signs of wear. The Perm PMG 132's construction is such that it will create a voltage difference across its terminals when its shaft is rotated. This voltage difference is proportional to the shaft's RPM. If a load is put across the Perm PMG 132's terminals while the shaft is being turned, a current proportional to the torque applied on the shaft will flow. The Perm PMG 132 is not rated as a generator by the manufacturer; however its ratings as a motor are a nominal voltage of up to 72V and a continuous current rating of 110amps, peak current for 10 minutes is 200 amps. The motor's current to torque ratio is 5.37A/Nm and its voltage to RPM ratio is 0.02V/RPM. Matching these ratings to the EX-21's ratings and adding the Perm PMG 132's efficiency to them one obtains the following table: Engine RPM 2800 3600 4000 Voltage Output 50 65 73 Max Current 75 70 66 From this table it is clear that the current output possible using the EX-21 is well below the continuous ratings of the Perm PMG 132's motor ratings as well as below the charging current limits of the battery pack. Thus, through careful component selection, the team was able construct a system which does not require the implementation of active generator controls. This meets the team's goal of simplicity and reliability. When driving, the generator's throttle actuator is setup in a fixed position and the generator's unregulated power is simply connected in parallel with the battery pack. By superimposing the maximum power of the generator on to the maximum power output of the batteries, this type of connection provides on average, throughout the various discharge states of the battery pack, 25HP of electrical power available to drive the vehicle. This setup should also smooth out potential power peaks the engine could encounter on hard acceleration thus enabling it to run more efficiently. This generator has been tested by the team both in a stationary (dyno) and mobile application (snowmobile). Testing enabled the team to fine tune the thermal management of the generator and to gain better understanding of the dynamics between the generator and the battery pack under different loading conditions. Testing showed that without proper cooling and thermal barriers the Perm PMG 132 motor could overheat from the EX-21’s waste heat conducting through the coupling cylinder. Proper heat barriers (silicon & Delrin gaskets) and cooling (fan) have been implemented following the test results. In terms of the dynamics between the generator and the battery, the testing showed that, as expected, without any controls, power from the battery pack takes precedence over power coming from the generator during a fast power demand ramp up. This proved that this simple setup does reduce the peak power demand form the generator without the need for active generator controls or any other power limiting circuitry. Control Systems The 25HP of electrical power available from the battery and the generator must be regulated based on the driver's input and converted to a lower voltage before they can reach the twin Etek drive motors. Following its goals of simplicity and reliability, the team found a way to use proven solid state components which could accomplish both tasks at once. The selected components for the tasks are a pair of Alltrax AXE 7245 DC motor controllers. The controller's output voltage is controlled via pulse width modulation (PWM). Each controller's PWM signal is controlled via a 0 to 5000ohms potentiometer linked to the driver's accelerator pedal. Thus, with a 72V battery pack, a 5000ohms signal would give a controller output of 72V. By limiting the controller's maximum PWM signal via the potentiometer, the team was capable of limiting the voltage output of the controllers to match the maximum nominal voltage of the motors. This method to simultaneously achieve voltage conversion and driver input in one step has been both bench and vehicle tested successfully by the team. Other than a maximum current set by the team, each controller's current output is unregulated. The only thing which determines the amount of current going to each motor is the physical requirements of turning the rotor at a speed proportional to the controller's voltage output. This voltage output is directly proportional to the accelerator pedal's position. Since both potentiometers are in sync, each motor sees the same voltage at its terminals at any given time. The end result is a very simple, independent rear wheel drive system which has no active control. The power going to each drive wheel is solely regulated by the load on each wheel; the higher the load on one wheel the higher the power going to this wheel's drive motor will be. Battery Management System The 72V lithium ion pack is managed by a I+ME battery management system (BMS). The BMS is composed of 1 “master” and 2 “slave” boards. The “slaves” monitor the voltage of all individual cells and the temperature of sample cells. Information gathered from both “slaves” is conveyed to the “master” board which adds it to its own monitoring of pack current input/output. The “master” has some output possibilities which can be triggered based on a number of conditions. For example, the “master” can close or open a contactor which effectively turns the pack on/off . Triggers for this output include: over voltage, under voltage, overheat, over current (charging or discharging) and communication problems. The BMS has performed flawlessly in both the electric and the hybrid snowmobile prototypes it was fitted on this winter. Frame and Suspension Originally, the baseline MRT 7 chassis was built with a certain weight limit in mind as well as a specified weight distribution. Adding the two lithium ion battery packs to the car as well as the generator and all the other electrical components, such as motors and controllers, greatly increases the weight of the vehicle and rearranges the distribution of the weight. Early weight estimates for the hybrid vehicle were of 645 lbs, whereas the original MRT 7 formula car had a mass of less than 500 lbs. This substantial weight difference increases the loads on the frame of the vehicle and on all the suspension components. Therefore, bracing members had to be added to the frame and to the suspension. Since the equilibrium of the vehicle's entire suspension system could be compromised from a single change in suspension component positioning, the team did everything it could not to change the suspension's configuration but only to reinforce it and tune it to the vehicle's new weight. The front suspension's bell crank supports had to be reinforced to avoid failure under high loads and its original springs were replaced with stiffer springs which can handle the loads imposed by the heavier vehicle. Similarly, the rear suspension's bell crank supports needed reinforcement and the spring stiffness had to be increased as well. Following its goal of assembling a simple design, in providing extra support to the rear suspension, the team was able to use the new support pieces as guards for the secondary chain drive. A fair amount of analysis went into vehicle's frame structure which was originally built to house a Yamaha motorcycle engine. The analysis showed that a number of structural supports had to be added to the frame in order for it to be able to bare the load of its new hybrid drivetrain. Other additional supports were inserted in key locations to make the old FSAE frame comply with some of the newer FSAE rules. Weight Distribution The side-to-side weight distribution was given strong consideration in the design of the vehicle. The majority of the components in the hybrid drivetrain come in pairs that are mirror images of each other along the vehicle's centerline. The only notable exception to this is the generator system. Every effort was made by the team to try and distribute the weight of the generator and its associated components evenly on either sides of the vehicle's centerline. In terms of height, most components are right along the vehicle's undertray and the generator is 6 inches above the bottom the vehicle. The main exception to this low placement of components is the electronics box which is located high on the back of the vehicle. The team felt that, for the electrical box, accessibility was more important than a low center of gravity. High Power Schematic High Power Schematic (+ Emergency Switches) super imposed onto vehicle frame