Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Limit of a function wikipedia , lookup
Riemann integral wikipedia , lookup
Path integral formulation wikipedia , lookup
Partial differential equation wikipedia , lookup
Lebesgue integration wikipedia , lookup
Multiple integral wikipedia , lookup
Fundamental theorem of calculus wikipedia , lookup
Function of several real variables wikipedia , lookup
Neumann–Poincaré operator wikipedia , lookup
REVIEW FOR FINAL EXAM
MINGFENG ZHAO
April 08, 2014
• Final Exam Review Session:
– Section 205 Review: April 17, 2015 (Friday), 12:00PM–3:00PM, BUCH A103
– Section 204 Review: April 20, 2015 (Monday), 12:00PM–3:00PM, MATH 203
• Final Exam Office Hours:
– April 20, 2015 (Monday), 1:00PM–4:00PM, LSK 300C
– April 21, 2015 (Tuesday), 2:30PM–4:30PM, LSK 300C
– April 22, 2015 (Wednesday), 12:30PM–3:00PM, LSK 300C
• PDF Files for final exam:
– Review notes for final exam.
– Review problems for final exam.
– Sample exam for Midterm exam 1, and Midterm exam 1.
– Sample exam for Midterm exam 2, and Midterm exam 2.
– Sample exam for Math 105, and Final exam for Math 105 in 2014 Spring.
– Final exam for Math 105 in 2013 Spring, and Final exam for Math 105 in 2012 Spring.
Remark 1. You can find all PDF files on the website:
http://www.math.ubc.ca/ mingfeng/2015%20Spring-Integral%20Calculus-Exams.html
• To get a good score on final exam:
I. Read this review notes carefully.
II. Do the review problems for final exam as many as possible.
III. Do Midterm Exam 1 and Midterm Exam 2 without solutions with sample exams for midterm.
IV. Do those two sample exams for final.
1
2
MINGFENG ZHAO
Review of Chapter 8 and Chapter 9:
Sequence, Infinite Series and Power Series
Limit of sequence, geometric sequence and squeeze theorem
I. Limit of sequence: If the terms of a sequence {an }∞
n=1 approach a unique number L as n increase, that is, if an
can be made arbitrarily close to L by taking n sufficiently large, then we say that the sequence {an } converges
to L, denoted by lim an = L. If the terms of the sequence do not approach a single number as n increases,
n→∞
the sequence has no limit, and the sequence diverges.
Remark 2. A convergent sequence must be bounded. A bounded monotone sequence is convergent.
II. Compute the limit of sequence by using functions: Suppose f (x) is a function such that f (n) = an for
all positive integers n, if lim f (x) = L, then lim an = L.
x→∞
n→∞
III. Geometric sequence: For a geometric sequence {arn }∞
n=0 , then
0,
if |r| < 1
lim arn =
a,
if r = 1,
n→∞
diverges, if r = −1 or |r| > 1.
∞
∞
IV. Squeeze theorem: Let {an }∞
n=1 , {bn }n=1 and {cn }n=1 be sequences such that an ≤ bn ≤ cn for all integers n
greater than some positive integer N . If lim an = lim cn = L, then lim bn = L.
n→∞
n→∞
n→∞
V. l’Hospital’s Rule: Let f (x) and g(x) be differential functions, and a be a number or ±∞, then
0
f 0 (x)
f (x)
a.
type: Assume that lim f (x) = lim g(x) = 0 and lim 0
= L, then lim
= L.
x→a
x→a
x→a g (x)
x→a g(x)
0
∞
f 0 (x)
f (x)
b.
type: Assume that lim f (x) = ±∞, lim g(x) = ±∞ and lim 0
= L, then lim
= L.
x→a
x→a
x→a g (x)
x→a g(x)
∞
Infinite series and partial sums
I. The sequence of partial sums of a series: The sequence of partial sums {Sn }∞
n=1 associated with the
∞
n
X
X
series
ak is given by: Sn =
ak for all n ≥ 1. If the sequence of partial sums {Sn }∞
n=1 has a limit L, we
k=1
k=1
REVIEW FOR FINAL EXAM
say that the infinite series
∞
X
3
ak converges to that limit L, that is,
k=1
∞
X
n
X
ak = lim Sn = lim
n→∞
k=1
n→∞
ak = L.
k=1
If the sequence of partial sums {Sn }∞
n=1 diverges, then we say that the infinite series
∞
X
ak diverges.
k=1
II. Properties of Convergent Series:
∞
∞
X
X
a. Suppose
ak converges to A and c is a real number, then the series
cak converges and
k=1
k=1
∞
X
cak = c
k=1
b. Suppose
∞
X
ak converges to A and
k=1
∞
X
ak = cA.
k=1
∞
X
bk converges to B, then the series
k=1
∞
X
∞
X
(ak ± bk ) converges, and
k=1
(ak ± bk ) = A ± B.
k=1
c. Suppose
∞
X
ak converges and
∞
X
k=1
∞
X
k=1
∞
X
bk diverges, then
d. If M is a positive integer, then
ak and
k=1
∞
X
(ak ± bk ) diverges.
k=1
ak either both converges or both divergent. In general,
k=M
whether a series converges does not depend on a finite number of terms added to or removed from the
series. However, the value of a convergent series does change if nonzero terms are added or removed.
Tests of Infinite series
I. Divergence test: If a series
∞
X
∞
X
ak converges, then lim ak = 0. That means, if lim ak 6= 0, then the series
k→∞
k=1
k→∞
ak diverges.
k=1
Remark 3. But if lim ak = 0, the divergence test does NOT work.
k→∞
II. Integral test: If f (x) is a continuous, positive, decreasing function for x ≥ 1, let ak = f (k) for k = 1, 2, · · · ,
then
∞
X
k=1
Z
ak
and
∞
f (x) dx
1
either both converge or both diverge. In the case of convergence, the value of the integral is NOT equal to the
value of the series.
4
MINGFENG ZHAO
III. Ratio test: Let
∞
X
ak be an infinite series and r = lim
k→∞
k=1
|ak+1 |
, then
|ak |
a. If 0 ≤ r < 1, the series converges.
b. If r > 1, the series diverges.
c. If r = 1, the ration test is inconclusive.
Remark 4. If the general kth term of series involves k!, k k or ak , where a is a constant, the Ratio Test is
advisable.
IV. Comparison test: Let
∞
X
ak and
k=1
∞
X
bk be series with positive terms, then
k=1
∞
X
a. If 0 < ak ≤ bk for all k ≥ 1, and
b. If 0 < bk ≤ ak for all k ≥ 1 and
V. Limit comparison test: Let
a. If 0 < L < ∞, then
b. If L = 0 and
∞
X
∞
X
∞
X
k=1
ak and
k=1
∞
X
k=1
k=1
bk diverges, then
∞
X
∞
X
ak also converges.
ak diverges as well.
bk be series with positive terms and L = lim
k→∞
k=1
bk
, then
ak
bk either both converge or both diverge.
k=1
bk converges, then
c. If L = ∞ and
∞
X
k=1
∞
X
ak and
k=1
k=1
∞
X
bk converges, then
bk diverges, then
∞
X
k=1
∞
X
ak converges.
ak diverges.
k=1
k=1
Remark 5. If the general kth term of the series is a rational function of k, use the Comparison Test or the
Limit Comparison Test.
VI. Absolutely convergence: If the series
∞
X
|ak | converges, then the series
k=1
Remark 6. If
∞
X
(−1)k
k=1
k
∞
X
ak converges but
k=1
∞
X
k=1
|ak | diverges, we say that
∞
X
ak converges.
k=1
∞
X
k=1
conditionally converges.
VII. p-series: Let p be a real number, then
∞
converges, if p > 1,
X
1
=
diverges,
kp
if p ≤ 1.
k=1
ak conditionally converges. For example,
REVIEW FOR FINAL EXAM
5
∞
VIII. Geometric series: For the geometric sequence {ark }∞
k=0 , then the sequence of partial sums {Sn }n=1 can be
given by:
na,
if r = 1
Sn =
n
1−r
a·
, if r 6= 1.
1−r
Then
a
, if |r| < 1,
1−r
ar =
diverges,
k=0
if |r| ≥ 1.
∞
X
k
Remark 7. To remember the sum of the geometric series
∞
X
ark with |r| < 1, you just remember that the
k=m
sum is equal to the quotient of the initial term and 1 − r. The partial sum Sn is equal to the quotient of the
difference of the first term and the last term∗r and 1 − r. That is,
the sum of the geometric series
=
the partial sum of the geometric series
=
the first term
1 − the ratio
the first term − the last term × the ratio
.
1 − the ratio
Power series
I. Power series: A power series has the general form
∞
X
ck (x − a)k , where a and ck ’s are real numbers, and x
k=0
is a variable. The ck ’s are the coefficients of the power series, and a is the center of the power series.
∞
X
The set of values of x for which the the series
ck (x − a)k converges it its interval of convergence. The
k=0
radius of convergence of the power series, denoted R, is the distance from the center of the series to the
boundary point of the interval of convergence.
Remark 8. The convergence or divergence at the boundary points of the interval will NOT be tested.
∞
X
|ck+1 |
, then
|ck |
k=0
∞
∞
X
X
1
the radius of convergence of the power series
ck (x−a)k is R = . In particular, the power series
ck (x−a)k
r
k=0
k=0
∞
X
absolutely converges for all |x − a| < R, and the power series
ck (x − a)k diverges for all |x − a| > R.
II. The radius of convergence of power series: For the power series
ck (x − a)k , let r = lim
k=0
III. Differentiating and integrating power series: Suppose the power series
k→∞
∞
X
k=0
for |x − a| < R, then
ck (x − a)k converges to f (x)
6
MINGFENG ZHAO
a. Then f (x) is differentiable for |x − a| < R, and
f 0 (x) =
∞
X
kck (x − a)k−1 ,
for all |x − a| < R.
k=0
b. Then
Z
f (x) dx =
∞
X
k=0
ck
(x − a)k+1
+ C,
k+1
IV. Combining power series: Suppose the power series
∞
X
for all |x − a| < R.
ck xk and
k=0
∞
X
dk xk converge to f (x) and g(x), respec-
k=0
tively, on an interval I, then
∞
X
a. The power series
(ck ± dk )xk converges to f (x) ± g(x) on I.
k=0
b. Let m be an integer such that k + m ≥ 0 for all therms of the power series xm
X
ck xk =
X
ck xk+m . Then
this series converges to xm f (x) for all x 6= 0 in I. When x = 0, the series converges to lim xm f (x).
x→0
c. If h(x) = bxm , where m is a positive integer and b is a nonzero real number, then the power series
∞
X
ck [h(x)]k converges to the composite function f (h(x)), for all x such that h(x) ∈ I.
k=0
Taylor series
I. Taylor series: Suppose a function f (x) has derivatives of all orders on an interval centered at point a, then
the Taylor series for f (x) centered at a is:
∞
X
f (k) (a)
k=0
k!
· (x − a)k := f (a) + f 0 (a)(x − a) +
f 00 (a)
f (3) (a)
(x − a)2 +
(x − a)3 + · · · .
2!
3!
A Taylor series centered at 0 is called a Maclaurin series.
Remark 9. The Taylor series for f (x) centered at a is exactly the power series of f (x) centered at a, and the
Maclaurin series for f (x) centered at a is exactly the power series of f (x) centered at 0.
Remark 10. The limits by Taylor series are NOT tested in the final exam.
II. Two important Maclaurin series:
1
1−x
=
ex
=
∞
X
xk = 1 + x + x2 + x3 + x4 + · · ·
for all −1 < x < 1
k=0
∞
X
xk
k=0
k!
=1+x+
x2
x3
x4
+
+
+ ···
2!
3!
4!
for all −∞ < x < ∞.
REVIEW FOR FINAL EXAM
7
Review of Chapter 12:
Functions of Several Variables
Vectors in 2 or 3 dimensions
For simplicity, we consider vector operations in R3 : Let c be a scalar(i.e., a real number), u = hu1 , u2 , u3 i and
v = hv1 , v2 , v3 i, then
I. Magnitude:
|u| =
q
u21 + u22 + u23 .
II. Vector addition:
u + v = hu1 + v1 , u2 + v2 , u3 + v3 i.
III. Vector subtraction:
u − v = hu1 − v1 , u2 − v2 , u3 − v3 i.
IV. Scalar multiplication:
cu = hcu1 , cu2 , cu3 i.
V. Distance between two points: Let P = (x1 , y1 , z1 ) and Q = (x2 , y2 , z2 ), then
p
−−→
distance between P and Q = |P Q| = (x1 − x2 )2 + (y1 − y2 )2 + (z1 − z2 )2 .
Dot product of vectors and angles
I. Dot product: Given vectors u = hu1 , u2 , u3 i, v = hv1 , v2 , v3 i and w, a real number c, then
u·v :
=
|u||v| cos(θ)
=
u1 v1 + u2 v2 + u3 v3
u·v
θ = cos−1
|u||v|
√
|u| =
u·u
Remark 11. The definition of dot product tells us the information of the angle between two vectors. More
precisely, in order to find the angle θ between vectors u and v:
8
MINGFENG ZHAO
a. Compute the dot product u · v.
b. Compute the magnitudes of u and v, respectively.
u·v
u·v
−1
c. Find the angle θ through the formula cos(θ) =
, that is, θ = cos
.
|u||v|
|u||v|
II. Properties of dot products:
– Commutative property: u · v = v · u.
– Associative property: c(u · v) = (cu) · v = u · (cv).
– Distributive property: u · (v + w) = u · v + u · w.
Remark 12. Notice that (u · v)w 6= u(v · w) in general.
III. If u · v = 0, we say that u and v are orthogonal, denoted by u ⊥ v; If there exists some nonzero constant λ
such that u = λv, we say that u is parallel to v, denoted by a // b.
Planes
I. Plane: The plane passing through the point P0 = (x0 , y0 , z0 ) with a nonzero normal vector n = ha, b, ci is
described by the equation:
a(x − x0 ) + b(y − y0 ) + c(z − z0 ) = 0,
or ax + by + cz = d,
where d = ax0 + by0 + cz0 .
II. Angle between two planes: For any two distinct planes P and Q with normal vectors n and m respectively,
the angle between these two planes P and Q is defined as the acute angle between n and m (i.e., between 0
and π/2). In particular,
a. Two distinct planes are parallel if their respective normal vectors are parallel (that is, the normal vectors
are scalar multiples of each other, or the angle is either 0 or π).
b. Two distinct planes are orthogonal if their respective normal vectors are orthogonal (that is, the dot
product of the normal vectors is zero, or the angle is
π
2 ).
Traces and level curves
I. Trace: The general equation of a surface can be implicitly given by F (x, y, z) = 0 be the equation of a surface,
then
REVIEW FOR FINAL EXAM
9
a. The trace in the plane x = a is given by the equation F (a, y, z) = 0.
b. The trace in the plane y = b is given by the equation F (x, b, z) = 0.
c. The trace in the plane z = c is given by the equation F (x, y, c) = 0.
II. Level curves: Given a surface z = f (x, y), for any z0 , the curve f (x, y) = z0 in the xy-plane is called a level
curve of the surface z = f (x, y) with level z0 .
Remark 13. The level curves with different levels do not intersect.
Partial derivatives, gradient, Hessian matrix and discriminant
I. Partial derivatives: The partial derivative of f with respect to x at the point (a, b) is:
fx (a, b) = lim
h→0
f (a + h, b) − f (a, b)
.
h
The partial derivative of f with respect to y at the point (a, b) is:
fy (a, b) = lim
h→0
f (a, b + b) − f (a, b)
.
h
Remark 14. To compute fx (x, y) is just to compute the derivative of f (x, y) with respect to x when treating
y is a constant; to compute fy (x, y) is just to compute the derivative of f (x, y) with respect to y when treating
x is a constant.
Remark 15. Implicit differentiation: Take the partial derivative on the both sides of the equation and apply
the chain rule.
Z
xy+y 2
sin(t2 ) dt, then
Example 1. Let F (x, y) =
x+2y
Fx
Fy
=
sin((xy + y 2 )2 ) · y − sin((x + 2y)2 ) · 1
=
y sin((xy + y 2 )2 ) − sin((x + 2y)2 )
=
sin((xy + y 2 )2 ) · 2 − sin((x + 2y)2 ) · (x + 2y)
=
2 sin((xy + y 2 )2 ) − (x + 2y) sin((x + 2y)2 ).
II. Clairaut’s theorem: fxy = fyx .
Remark 16. Clairuat’s theorem just says that we can switch the orders when computing partial derivatives.
10
MINGFENG ZHAO
III. Gradient: The gradient of f (x, y), ∇f (x, y), is defined as:
∇f (x, y) = hfx (x, y), fy (x, y)i.
fxx
fxy
fyx
IV. The Discriminant of f , D(x, y), is defined as:
fyy
IV. The Hessian matrix of f is defined as:
.
D(x, y) = fxx (x, y)fyy (x, y) − (fxy (x, y))2 .
Local maximum/minimal/saddle values, critical points, classification of critical points
I. Local maximum/minimal values:
a. A function f has a local maximum value at point (a, b) if f (x, y) ≤ f (a, b) for all (x, y) in some small
open disk centered at (a, b).
b. A function f has a local minimum value at point (a, b) if f (x, y) ≥ f (a, b) for all (x, y) in some small
open disk centered at (a, b).
c. A point (a, b) is call a saddle point of f if (a, b) is a critical point of f , and in every small open disk
centered at (a, b), there are points (x, y) for which f (x, y) > f (a, b) and points for which f (x, y) < f (a, b).
II. Critical points: If f has a local maximum or local minimum value at point (a, b), then (a, b) is a critical point
of f , that is, ∇f (a, b) = 0 and fx (a, b) = fy (a, b) = 0.
III. Second Derivative Test: Let the point (a, b) be a critical point of f , that is, fx (a, b) = fy (a, b) = 0, then
a. If D(a, b) > 0 and fxx (a, b) < 0, then f has a local maximum value at (a, b).
b. If D(a, b) > 0 and fxx (a, b) > 0, then f has a local minimum value at (a, b).
c. If D(a, b) < 0, then f has a saddle point at (a, b).
d. If D(a, b) = 0, then the test is inconclusive.
Where D(a, b) := fxx (a, b)fyy (a, b) − (fxy (a, b))2 is the discriminant of f .
Absolute maximum/minimal values
I. Absolute maximum/minimal values: Let f (x, y) be defined on a subset R of R2 containing point (a, b),
then
a. we say that f (a, b) is an absolute maximum value of f on R if f (a, b) ≥ f (x, y) for all (x, y) in R.
REVIEW FOR FINAL EXAM
11
b. we say that f (a, b) is an absolute minimum value of f on R if f (a, b) ≤ f (x, y) for all (x, y) in R.
Remark 17. Any function on a bounded closed subset R will attain its absolute maximum value and the
absolute minimum values on R.
Remark 18. Let R be a bounded closed subset in R2 , to find the absolute maximum and minimum values of
f on R:
Step 1: Find the maximum and minimum values of f on the boundary of R.
Step 2: Determine the values of f at all critical points in R.
Step 3: The greatest function value found in Step 1 and Step 2 is the absolute maximum value of f on R, and
the least function value found in Step 1 and Step 2 is the absolute minimum value of f on R
Lagrange multipliers
Consider the optimization problem:
max / min
f (x, y) −→
g(x, y) = 0
−→
objective function
constraint.
Method of Lagrange Multipliers:
If ∇g(x, y) 6= 0 for all (x, y) such that g(x, y) = 0, to find the maximum and minimum values of f (x, y)
subject to the constraint g(x, y) = 0, we have two steps:
Step 1. Find the values of x, y and λ such that
∇f (x, y) = λ∇g(x, y),
and g(x, y) = 0.
Step 2. Among the points (x, y) found in Step 1, select the largest and smallest corresponding function
values. These values are the maximum and minimum values of f (x, y) subject to the constraint
g(x, y) = 0.
Remark 19. For solving ∇f (x, y) = λ∇g(x, y) and g(x, y) = 0, fist, you should check whether λ = 0 or not. Usually,
λ 6= 0
12
MINGFENG ZHAO
Review of Chapter 5 and Chapter 7:
Integration, Differential Equations and Probability
(Left, right, midpoint) Riemann sum, definite integral and net area
I. For a regular partition x0 = a < x1 < · · · < xn = b of [a, b], then
∆x =
b−a
,
n
and
xk = a + k∆x,
for all k = 0, 1, 2, · · · , n.
The Riemann sum of f (x) on [a, b] with n subintervals can be written:
f (x∗1 )∆x + f (x∗2 )∆x + · · · + f (x∗n )∆x =
n
X
f (x∗k )∆x.
k=1
For the choices x∗k ’s, we have
a. For the left Riemann sum, we have x∗k = xk−1 = a + (k − 1)∆x.
b. For the right Riemann sum, we have x∗k = xk = a + k∆x.
a + (k − 1)∆x + a + k∆x
xk−1 + xk
=
= a+
c. For the midpoint Riemann sum, we have x∗k =
2
2
1
k−
∆x.
2
Z b
II. For the definite integral
f (x) dx, we have
a
Z
b
(1)
f (x) dx := lim
n→∞
a
n
X
f (x∗k )∆x.
k=1
Z
b
Remark 20. For the formula (1), it has two meanings: one is to compute
f (x) dx by using the Riemann
a
Z b
n
X1
k
f
by using the integral
f (x) dx.
sum; the other one is to compute some sum like
n
n
a
k=1
Remark 21. The following are some simple properties of the definite integrals:
Z a
–
f (x) dx = 0 for any a.
Zab
Z a
–
f (x) dx = −
f (x) dx.
Zab
Z cb
Z b
–
f (x) dx =
f (x) dx +
f (x) dx for any c.
a
a
c
REVIEW FOR FINAL EXAM
13
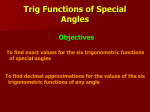
III. Let R be the region bounded by the graph of f (x) and x-axis between x = a and x = b, then
the net area of R
=
the sum of the areas of the parts of R lies above the x-axis
−the sum of the ares of the parts of R lies below x-axis on [a, b]
Z b
=
f (x) dx
a
Z
the area of R
b
|f (x)| dx.
=
a
Figure 1. Yellow=positive net area, Pink=negative net area
Remark 22. Numerical integration will not be tested in final exam.
Antiderivatives, indefinite integrals, and fundamental theorem of calculus
I. If F 0 (x) = f (x), then we say that F (x) is an antiderivative of f (x). Moreover, the fundamental theorem
of calculus says that
Z
f (x) dx = F (x) + C,
Z
and
a
b
b
f (x) dx = F (x)|a := F (b) − F (a).
Z
II. Fundamental theorem of calculus: If f (x) is continuous, then
x
f (t) dt is an antiderivative of f (x), and
a
d
dx
Z
b(x)
!
f (t) dt
a(x)
= f (b(x)) · b0 (x) − f (a(x)) · a0 (x).
14
MINGFENG ZHAO
III. Basic integrals one should remember:
p+1
Z
x
+ C, if p 6= −1
p
p+1
x dx =
ln |x| + C, if p = −1.
Z
Z
eax dx =
1 ax
e +C
a
Z
1
sin(ax) + C,
a
Z
1
sec2 (ax) dx = tan(ax) + C,
a
Z
x
1
√
+ C,
dx = sin−1
a
a2 − x2
Z
tan(x) dx = − ln | cos(x)| + C,
Z
sec(x) tan(x) dx = sec(x) + C.
1
sin(ax) dx = − cos(ax) + C
a
Z
1
csc2 (ax) dx = − cot(ax) + C
a
Z
1
1
−1 x
dx
=
tan
+C
x2 + a2
a
a
Z
sec(x) dx = ln | sec(x) + tan(x)| + C
cos(ax) dx =
IV. Important trigonometric identities:
sin2 (θ) + cos2 (θ) = 1,
1 + tan2 (θ) = sec2 (θ)
sin(2θ) = 2 sin(θ) cos(θ),
cos(2θ) = 2 cos2 (θ) − 1 = 1 − 2 sin2 (θ) = cos2 (θ) − sin2 (θ)
Substitution, trigonometric substitution, and integration by parts
I. Substitution: Let u = g(x), then du = g 0 (x) dx and
Z
Z
Z
0
f (g(x))g (x) dx = f (u) du, and
b
0
Z
g(b)
f (g(x))g (x) dx =
a
f (u) du.
g(a)
Remark 23. The completing square of a quadratic polynomial:
#
"
2 2
b
c
b
b
c
2
2
ax + bx + c = a x + x +
.
=a x+
−
+
a
a
2a
2a
a
The solutions to a quadratic equations ax2 + bx + c = 0 are:
√
−b ± b2 − 4ac
x1,2 =
.
2a
Remark 24. For the integrand involving some fractional power, use the substitution x = um , where m is a
Z
Z
1
x
6
common multiple of those denominator of the fractional powers, e.g.,
dx
(use
u
=
x
),
1
2
1
2 dx
2 + x3
5 + x3
x
x
Z
1
4
(use u = x15 ),
1
1 dx (use u = x ), etc..
x2 + x4
REVIEW FOR FINAL EXAM
15
II. Trigonometric substitution:
√
a. Integrals involving a2 − x2 : Let x = a sin(θ), then dx = a cos(θ) dθ and
p
b. Integrals involving
√
a2 − x2 =
q
a2 − a2 sin2 (θ) = a cos(θ).
a2 + x2 : Let x = a tan(θ), then dx = a sec2 (θ) dθ and
q
p
a2 + x2 = a2 + a2 tan2 (θ) = a sec(θ).
c. Integrals involving
√
x2 − a2 : Let x = a sec(θ), then d sec(θ) = sec(θ) tan(θ) dθ and
p
p
x2 − a2 = a2 sec2 (θ) − a2 = a tan(θ).
III. Integration by parts: Let u and v be differentiable, then
Z
Z
u dv = uv −
Z
v du,
and
a
b
b
u(x)v 0 (x) d = u(x)v(x)|a −
Z
b
v(x)u0 (x) dx.
a
That is,
Z
uv 0 dx = uv −
Z
vu0 dx.
where dv is the most complicated portion of the integrand that can be “ easily” integrated, and u is that portion
of the integrand whose derivative du is a “ simpler ” function than u itself. For the choice of u, please follow
the ‘ILATE’ order:
Trigonometric integrals
Z
I. Evaluate
sinm (x) cosn (x) dx:
I
=
Inverse trigonometric function
L
=
Logarithmic function
A
=
Algebraic function
T
=
Trigonometric function
E
=
Exponential function
16
MINGFENG ZHAO
Cases
Strategy
m odd and positive, n any real number
Split off sin(x), rewrite the resulting even powers of sin(x)
in terms of cos(x), and then use u = cos(x)
n odd and positive, m any real number
Split off cos(x), rewrite the resulting even powers of cos(x)
in terms of sin(x),and then use u = sin(x)
m and n both even
Use half-angle formulas to transform the integrand into a polynomial
in cos(2x), and apply the preceding strategies once again to powers
of cos(2x) greater than 1.
Z
II. Evaluate
tanm (x) secn (x) dx:
Cases
Strategy
n even
Split off sec2 (x), rewrite the remaining even power of sec(x) in terms of tan(x),
and use u = tan(x)
m odd
Split off sec(x) tan(x), rewrite the remaining even power of tan(x) in terms of sec(x),
and use u = sec(x)
m even and n odd
Rewrite the even power of tan(x) in terms of sec(x) to produce a polynomial in sec(x),
apply reduction formula to each term
Remark 25. One does not need to remember the above two tables, just try all possible substitutions d cos(x), d sin(x),
d tan(x), d sec(x), otherwise, try half angle identities.
Partial fraction decomposition
p(x)
be a proper rational function in reduced form. Assume the denominator
q(x)
q(x has been factored completed over the real numbers and m is a positive integer:
After using long division, let f (x) =
• Repeated linear factor: A factor (x − r)m in the denominator requires the partial fractions
A2
A1
Am
+
+ ··· +
.
x − r (x − r)2
(x − r)m
Example 2. For example, we have
1
(x − 1)(x + 2)
=
A
B
+
x−1 x+2
REVIEW FOR FINAL EXAM
17
1
(x + 1)(x + 3)(x − 2)
=
A
B
C
+
+
x+1 x+3 x−2
x
(x + 1)2 (x − 1)
=
C
A
B
+
+
.
2
x + 1 (x + 1)
x−1
Remark 26. When you factor q(x), please make the first coefficient of q(x) to be 1, e.g.,
2x2 − 6x + 4 = 2(x2 − 3x + 2) = 2(x − 1)(x − 2).
Remark 27. If the numerator has higher degree than the denominator, we should use the long division first so
that we will get a polynomial plus some proper rational function.
Improper integrals for infinite intervals
I. Improper integrals for infinite intervals: Let a and b be two real numbers, then
a. If f is continuous on [a, ∞), then
∞
Z
b
Z
f (x) dx := lim
f (x) dx.
b→∞
a
a
b. If f is continuous on (−∞, b], then
Z
b
b
Z
f (x) dx := lim
f (x) dx.
a→−∞
−∞
a
c. If f is continuous on (−∞, ∞) and for any real number c, then
Z
∞
Z
f (x) dx := lim
a→−∞
−∞
c
Z
f (x) dx + lim
b→∞
a
b
f (x) dx.
c
For the integrals in the above three cases, if the integral is finite, we say the integral converges; otherwise,
the integral diverges.
II. Improper integrals for unbounded integrands: Let a and b be two real numbers, then
a. If f is continuous on (a, b] with lim+ f (x) = ∞ or −∞, then
x→a
b
Z
Z
f (x) dx := lim+
f (x) dx.
c→a
a
b
c
b. If f is continuous on [a, b) with lim− f (x) = ∞ or −∞, then
x→b
Z
a
b
Z
f (x) dx := lim−
c→b
c
f (x) dx.
a
18
MINGFENG ZHAO
c. Let a < p < b, if f is continuous on (a, b] with lim f (x) = ∞ or −∞, then
x→p
Z
b
Z
f (x) dx := lim
a
c→p−
c
Z
f (x) dx + lim
d→p+
a
b
f (x) dx.
d
For the integrals in the above three cases, if the integral is finite, we say the integral converges; otherwise,
the integral diverges.
Remark 28. For the definition of Improper integrals for infinite intervals, you can first compute
Z
f (x) dx, then plug the upper limit and lower limit.
For Case a and Case b in Improper integrals for unbounded integrands, you also can first compute
Z
f (x) dx, then plug the upper limit and lower limit. But for Case c in Improper integrals for unbounded
integrands, you must split the integral into two integrals, then do the same steps as before.
Differential equations and integral equations
I. Differential equations: Let’s consider
y0 =
dy
= f (x)g(y).
dx
1) If g(a) = 0 for some constant a, then y(x) ≡ a is a solution.
2) If g(y) 6= 0, then
dy
1
·
= f (x).
g(y) dx
That is,
1
dy = f (x) dx.
g(y)
Hence we have
Z
1
dy =
g(y)
Z
f (x) dx.
In summary,
1) y(x) ≡ a for some constant a such that g(a) = 0
0
Z
Z
y = f (x)g(y) =⇒
.
1
dy = f (x) dx.
2)
g(y)
II. For an integral equation, you will get a differential equation after differentiating the equation, and then solve
this differential equation.
REVIEW FOR FINAL EXAM
2
Z
Remark 29. For example, f (x) = x +
x2
19
√
f ( t) dt, take the derivative on the both sides, then f 0 (x) =
1
2x + f (x) · 2x and f (1) = 1, that is, let y(x) = f (x), then y 0 = 2x + 2xy and y(1) = 1.
Probability
Let X be a continuous random variable, then
I. Cumulative distribution function(CDF) F (x) := Pr(X ≤ x), we have
a. 0 ≤ F (x) ≤ 1 for all x.
b. F (x) is a non-decreasing continuous function.
c.
lim
x→−∞
F (x) = 0.
d. lim F (x) = 1.
x→∞
II. Probability density function (PDF) f (x) =
dF (x)
, we have
dx
a. f (x) ≥ 0 for all x.
Z ∞
b.
f (x) dx = 1.
−∞
Z x
c. F (x) =
f (t) dt.
−∞
Z b
d. Pr(a ≤ X ≤ b) =
f (t) dt.
a
III. Expected value: Let f (x) be the PDF for a continuous random variable X, then the expected value, or
expectation, or mean, of X is defined by:
Z
∞
E(X) =
xf (x) dx.
−∞
Remark 30. The median, variance and standard deviation of a random variable will NOT be tested.
20
MINGFENG ZHAO
Something you should remember
• Derivative of the integrals:
!
Z b(x)
d
f (t) dt = f (b(x)) · b0 (x) − f (a(x)) · a0 (x).
dx
a(x)
• Basic integrals:
Z
p+1
x
+ C,
p
p+1
x dx =
ln |x| + C,
if p 6= −1
Z
eax dx =
if p = −1.
1 ax
e +C
a
Z
Z
1
sin(ax) dx = − cos(ax) + C
a
Z
1
csc2 (ax) dx = − cot(ax) + C
a
Z
1
1
−1 x
dx
=
tan
+C
x2 + a2
a
a
Z
sec(x) dx = ln | sec(x) + tan(x)| + C
1
cos(ax) dx = sin(ax) + C,
a
Z
1
sec2 (ax) dx = tan(ax) + C,
a
Z
x
1
√
+ C,
dx = sin−1
a
a2 − x2
Z
tan(x) dx = − ln | cos(x)| + C,
Z
sec(x) tan(x) dx = sec(x) + C.
• Important trigonometric identities:
sin2 (θ) + cos2 (θ) = 1,
1 + tan2 (θ) = sec2 (θ)
sin(2θ) = 2 sin(θ) cos(θ),
cos(2θ) = 2 cos2 (θ) − 1 = 1 − 2 sin2 (θ) = cos2 (θ) − sin2 (θ)
• Important Maclaurin series:
1
1−x
=
ex
=
∞
X
xk = 1 + x + x2 + x3 + x4 + · · ·
for all −1 < x < 1
k=0
∞
X
xk
k=0
k!
=1+x+
x2
x3
x4
+
+
+ ···
2!
3!
4!
for all −∞ < x < ∞.
• Cumulative distribution function(CDF) F (x) := Pr(X ≤ x), we have
a. 0 ≤ F (x) ≤ 1 for all x.
b. F (x) is a non-decreasing continuous function.
c.
lim
x→−∞
F (x) = 0.
d. lim F (x) = 1.
x→∞
• Probability density function (PDF) f (x) =
a. f (x) ≥ 0 for all x.
dF (x)
, we have
dx
REVIEW FOR FINAL EXAM
Z
21
∞
b.
f (x) dx = 1.
Z x
c. F (x) =
f (t) dt.
−∞
Z b
d. Pr(a ≤ X ≤ b) =
f (t) dt.
−∞
a
• Expected value: Let f (x) be the PDF for a continuous random variable X, then the expected value, or
expectation, or mean, of X is defined by:
Z
∞
E(X) =
xf (x) dx.
−∞
Department of Mathematics, The University of British Columbia, Room 121, 1984 Mathematics Road, Vancouver, B.C.
Canada V6T 1Z2
E-mail address: [email protected]