Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
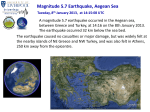
The 16th European Conference of Fracture ECF16 Minisymposium: Integrity of Dynamical Systems (Theory, Applications and Experiments). Alexandroupolis, Greece, site of the Democritus University of Thrace, July 3-7, 2006 ___________________________________________________________________________________________________________ Invited Paper SLIDING MODE CONTROL APPLIED TO HIGH RISE BUILDINGS UNDER EARTHQUAKE EXCITATION Georgi M. Dimirovski Dogus University, Faculty of Engineering Acibadem, Zeamet Sk. 21, Kadikoy, TR-34722 Istanbul, Rep. of Turkey E-mail: [email protected]; Fax: +90-216-327-9631; Tel: +90-216-327-1104 and SS Cyril and Methodius University, Faculty of Electrical Engineering Rugjer Boskovic b.b., Karpos II, MK-1000, Skopje, Rep. of Macedonia Abstract: For The goal to control the dynamics of high-rise buildings (HRB’s) and other structural systems in order to ameliorate or prevent their destruction when subject to earthquake excitation has been subject of research for several decades. A number of models of high-rise buildings dynamics as well as control techniques have been developed and also experimental and full-scale implementations curried out. All known control designs have advantages and disadvantages as well as operating limits. This goal appeared to be much more involved then expected, in particular with regard to implementation, and it an area of ongoing extensive research. In this paper we explore the application of sliding mode control to vibration control of a multi-story structural system under earthquake excitation as an active seismic compensation or isolation device. Simulation studies of the proposed control designs are carried out using a base plus three-store building structure under El Centro earthquake. Simulation results have shown that the sliding mode control can decrease significantly displacements of the floors. The performance has been compared to that in the application of traditional industrial controls, and relevant conclusions drawn. This controller can be applied for higher order building. Keywords: Earthquake excitation, linearized models, sliding mode control, structural systems, vibration control. EXTENDED SUMMARY In this control engineering study (also see Figure 1), a couple of non-linear Sliding Mode Control (SMC) and the conventional linear Proportional-Plus-Integral (PID) controls have been separately designed using a standard benchmark model of a 4-storey HRB (Figure 2 a, b). The respective control systems are supposed to be employed in terms of an active seismic isolation device for structures with multiple degrees of freedom of motion along with a base isolation of the HRB. The applied conventional PID control has been inspired by the success of standard industrial controls, thus representing an appealing conventional method of pragmatic importance. Since this control method is well known, can easily be applied and has resulted in the most widely spread practical control designs, it has an important role in all control applications. This method is also known, however, that it cannot cope with variations in technical parameters and model uncertainties. Yet high-rise building (HRB) models may well have uncertainties and/or parameter changes. Therefore, experimental and theoretical investigations have been carried with the sliding mode control introduced because of its robust character and superior performance when plants may possess uncertainties and/or parameter variations. Besides, this control method can easily be applied to non-linear systems. The structural system used in control design and simulation investigations of the overall closed-loop system has four degrees of freedom. A disturbance input representing earthquake is applied to the base, as it happens in events of natural earthquakes. Time histories of the storey displacements and of control signals as well as the respective frequency responses describe 1 modes of HRB dynamic behaviour in cases of uncontrolled and PID or SMC stabilization controlled 4-DoF structure (Figures 3 and 4). Figure 1. Conceptual model of a general dynamic system and its controlling infrastructure interpreted in engineering terms. The benchmark structural system under earthquake excitation has four degrees of freedom in horizontal direction. The physical system schematic is shown in Figure 2 a, while its model diagram for planar vibrating motion is shown in Figure 2 b. The masses of each of the storey are m1 , m2 and m3 , respectively, whereas m0 represents the mass of the base storey; these are assumed as concentrated on the floor. Displacement variables x 0 , x1 , x 2 and x3 represent the lateral displacements of the respective masses. Following the sensor-actuator collocation principle, all springs and dampers are acting in horizontal direction of lateral vibrating motion. (a) (b) Figure 2. Schematic of a 4 storey (base-plus-3-storey) building with base isolation (a), and its conceptual planar model for the lateral vibrating motion (b). The mathematical representation model of this HRB structural system has been simulated for the case of a striking force of 10 kN as a step input to the base being applied at the fifth second following the initial equilibrium state as well as for the case of El Centro excitation with a PGA of 0.1g (see Figure 4). Some samples of the results are shown in Figure 2, namely the PID and SMC controlled and uncontrolled time responses of the first and third stories. Furthermore, Figures 3 shows the respective frequency responses of superimposed on the uncontrolled frequency response. Since the SMC controlled structure is governed by an essentially nonlinear control law, the overall SMC control system possesses a superior performance albeit a 2 considerable improvement in the lateral displacements has been achieved by appropriate tuning the PID control law. (a) (b) Figure 3. Input excitation disturbance of HRB’s in terms of El-Centro earthquake acceleration with a PGA of 0.1g (a); output frequency responses of the third storey for the uncontrolled and for SMC stabilization controlled HRB (b). (a) (b) Figure 4. Uncontrolled versus PID and SMC controlled time responses of displacements at the first (a) and the third (b) storey of the 4-storey HRB benchmark structure. ******* 3 AN OUTLINE OF THE PRESENTATION 1. An Introduction 2. On Physics of Vibrating Motion in High-Rise Buildings 3. Modelling the Dynamics of Structural Systems 4. Sliding-Mode Control of HRB: Method and Control Design 4.1. Some Essentialities of Sliding-Mode Control Method 4.2. Considerations of the Sliding-Mode Control Design 5. Simulation Results with the 4-DOF Building Structure 6. Conclusions At Dogus University of Istanbul November 30, 2004 BiSv.P! 4