Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Notes on Homology Theory
Abubakr Muhammad
∗
We provide a short introduction to the various concepts of homology theory in algebraic topology.
We closely follow the presentation in [3]. Interested readers are referred to this excellent text for
a comprehensive introduction. We start with a quick review of some frequently used concepts
of elementary group theory.
1
Free Abelian Groups
Let (G1 , +) and (G2 , ∗) be two Abelian groups. A map f : G1 → G2 is said to be a homomorphism if
f (x + y) = f (x) ∗ f (y),
for any x, y ∈ G1 . A bijective homomorphism is called an isomorphism. We write this as
G1 ' G2 . The fundamental theorem of homomorphism is stated as follows.
Theorem 1.1 Let f : G1 → G2 be a homomorphism. Then
G1 /ker ' imf.
Take r elements g1 , · · · , gr of a group G. The elements of G of the form
n1 g1 + · · · + nr gr , ni ∈ Z, 1 ≤ i ≤ r,
make a subgroup H inside G. H is said to be a subgroup generated g1 , · · · , gr . If G itself is
generated by a finite number of elements, then G is said to be finitely generated. The elements
g1 , · · · , gr are said to be linearly independent if n1 g1 +· · ·+nr gr = 0 only when n1 = · · · = nr = 0.
If G is finitely generated by r linearly independent elements, G is called a free Abelian group of
rank r.
If G is generated by one element g, G = {0, g, 2g, · · · } is called a cyclic group. If ng = 0 for
some n ∈ Z − {0}, then G is a finite cyclic group. Otherwise, it is an infinite cyclic group. Any
infinite cyclic group is isomorphic to Z, while a finite cyclic group is isomorphic to some Zn . If
∗ School
of Computer Science, McGill University, Montreal, Canada. [email protected]
1
G is free Abelian group of rank r and H is subgroup of G. We may choose p generators g1 , ·, gp
out of r generators of G so that k1 g1 , · · · , kp gp generate H of rank p. In other words
H ' k1 Z ⊕ k2 Z ⊕ · · · ⊕ kp Z.
We now give the fundamental theorem of finitely generated Abelian groups.
Theorem 1.2 Let G be a finitely generated Abelian group (not necessarily free) with m generators. Then G is isomorphic to the direct sum of cyclic groups,
G ' Z ⊕ Z ⊕ · · · ⊕ Z ⊕Zk1 ⊕ · · · ⊕ Zkp ,
|
{z
}
r
where m = r + p. r is called the rank of G.
Finally an exact sequence is defined as a sequence of Abelian groups and homomorphisms between them,
αn+1
αn
· · · → An+1 −→ An −→
An−1 → · · ·
such that ker αn = im αn+1 for each n.
2
Topological spaces and Homotopy
Let X be any set and J be an index set. Let U = {Ui | i ∈ J} denote a certain collection of
open subsets of X. The pair (X, U ) is a topological space of U satisfies the following:
1. ∅, X ∈ U.
2. If I is a (possibly infinite) sub-collection of J, then ∪i∈I Uj ∈ U .
3. If K is any finite sub-collection of J, then ∩k∈K Uk ∈ U.
A deformation retract of a topological space X onto a subspace A is a family of maps ft : X → X,
t ∈ [0, 1], such that f0 = id (the identity map), f1 (X) = A and ft |A = id for all t. The family
ft , should be continuous in the sense that the associated map X × [0, 1] → X, (x, t) 7→ ft (x) is
continuous.
A deformation retract is a special case of the general notion of homotopy. A homotopy is simply
any family of maps ft : X → Y , t ∈ [0, 1], such that the associated map F : X × [0, 1] → Y
given by F (x, t) = ft (x) is continuous. Two maps f0 , f1 : X → Y are said to be homotopic
maps, if there exists a homotopy ft connecting them and once writes f0 ' f1 . In these terms a
deformation retract of X onto a subspace A is a homotopy from the identity map of X onto A,
a map r : X → X such that r(X) = A and r|A = id.
2
In this work, we are mainly concerned with a special type of topological spaces, known as simplicial complexes. For an introduction to simplicial complexes, see Chapter ??. Here, we introduce
some broader classes of topological spaces, namely the CW complexes and ∆-complexes. Simplicial complexes are special types of these spaces. We therefore present the general theory for
a more comprehensive introduction.
A cell complex is a topological space constructed by the following procedure:
1. Start with a discrete set X 0 , whose points are regarded as 0-cells.
2. Inductively, from the n-skeleton X n , construct X n−1 by attaching n-cells enα via maps
φα : S`n−1 → X n−1 . This means that X n is the quotient space of the disjoint union
X n−1 α Dαn of X n−1 with a collection of`n-disks Dαn under the identifications x ∼ φα (x)
for x ∈ ∂Dαn . Thus as a set, X n = X n−1 α enα where each enα is an open n-disk.
3. Once can either stop this inductive process at a finite stage, setting X = X n for some
n < ∞, or one can continue indefinitely, setting X = ∪n X n . In the latter case X is give
the weak topology: A set A ⊂ X is open (or closed) if and only if A ∩ X n is open (or
closed) in X n for each n.
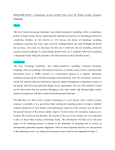
Cell complexes are also called as CW complexes. An example of a cell complex is drawn in Figure
1. This cell complex has one 0-cell, two 1-cells and one 2-cell. The sphere S n has the structure
of a cell complex with just two cells, e0 and en , the n-cell being attached by the constant map
S n−1 → e0 .
e11
0
e
e0
e2
e11
e2
e10
e10
e0
0
e
e10
e11
e0
Figure 1: A cell complex representation of a torus S 1 × S 1 .
Each n-cell enα in a cell complex has a characteristic map Φα : Dαn → X which extends the
attaching map φα and is a homomorphism from the interior of Dαn onto enα . Therefore, Φα can
be thought of as the composition
a
π
Dαn −→ X n ,→ X.
Dαn ,→ X n−1
α
3
where π is the quotient map defining X n .
A sub-complex of a cell complex is a closed subspace A ⊂ X that is a union of cells of X. A is a
cell complex in its own right. A pair (X, A) consisting of a cell complex X and a sub-complex
A is called a CW pair .
A graph is a 1-dimensional cell complex. It contains vertices (0-cells) and edges (1-cells). Similarly, simplicial complexes can also be thought of as cell complexes. It is however, more instructive to start with a more primitive form of complexes, known as ∆-complexes.
∆-complexes are built out of simplices. An n-simplex is defined as the smallest convex set in
Rd containing n + 1 points v0 , · · · , vn , that do not lie in a hyperplane of dimension less than
n. The points vi are called the vertices of the simplex, and the simplex itself is denoted by
[v0 , v1 , · · · , vn ]. The standard n-simplex is given by
X
∆n = {(t0 , · · · , tn ) ∈ Rn+1 |
ti = 1, and ti ≥ 0 for all i}.
i
A face of a simplex [v0 , · · · , vn ] is the sub-simplex with vertices any nonempty subset of the vi ’s.
By convention, a face is ordered according to their order in the larger simplex. A ∆-complex X,
is a quotient space of a collection of disjoint simplices obtained by identifying certain of their
faces via the canonical linear homeomorphisms that preserve the ordering of vertices. Hence,
the identifications never result in two distinct points in the interior of a face, being identified
in X. Therefore, X is the disjoint union of a collection of open simplices (simplices with their
proper faces deleted).
Each such open simplex enα of dimension n comes equipped with a canonical map (called the
characteristic map) σα : ∆n → X restricting to a homeomorphism from the interior of ∆n onto
enα . A key property of the characteristic map is that its restrictions to (n − 1)-dimensional faces
of ∆n are characteristic maps σβ for open simplices en−1
of X. This property can be used to
β
define a ∆-complex as a CW complex X in which each n-cell enα has a distinguished characteristic
map σα : ∆n → X such that the restriction of σα to each (n − 1)-face of ∆n is the distinguished
characteristic map of an (n − 1)-cell of X.
3
Simplicial Homology
We first define the simplicial homology of ∆-complexes. For a more gentle introduction, see
Chapter ??. Let ∆n (X) ne the free Abelian group with basis the open simplices enα of the
∆-complex X.
P The elements of ∆n (X) are called as n-chains. These elements can
P be written as
finite sums α nα enα with coefficients nα ∈ Z. One can also consider them as α nα σα .
The boundary homomorphism ∂n : ∆n (X) → ∆n−1 (X) can be defined by specifying its values
on basis elements:
X
∂n (σα ) =
(−1)i σα |[v0 ,··· ,vˆi ,··· ,vn ] .
i
4
∂n−1
∂
n
Lemma 3.1 The composition ∆n (X) −→
∆n (X) −→ ∆n−2 (X) is zero. In other notation
∂n ◦ ∂n−1 = 0.
Proof: This can be checked by a simple calculation.
Ã
!
X
i
∂n−1 (∂n (σ)) = ∂n−1
(−1) σ|[v0 ,··· ,vˆi ,··· ,vn ]
=
X
i
i
(−1) (−1)j σ|[v0 ,··· ,vˆj ,··· ,vˆi ,··· ,vn ] +
X
j<i
(−1)i (−1)j−1 σ|[v0 ,··· ,vˆi ,··· ,vˆj ,··· ,vn ]
j>i
= 0.
The chain groups ∆n (X) are generally denoted by Cn . Note that each of the chain groups Cn
is an Abelian group. We therefore get a sequence of homomorphisms of Abelian groups
∂k+2
∂k+1
∂
∂
∂
∂
k
2
1
0
· · · −→ Ck+1 −→ Ck −→
Ck−1 · · · −→
C1 −→
C0 −→
0
with ∂k ∂k+1 = 0 for each k. Such a sequence is called a chain complex . From ∂k ∂k+1 = 0 it
follows that im∂n+1 ⊂ ker∂n . We define the simplicial homology groups by the quotient groups
Hn∆ (X) =
ker∂n
.
im∂n+1
The elements of Hn∆ (X) are the cosets of im∂n+1 , and are referred to as homology classes.
Elements of ker∂n are called as cycles and those of im∂n+1 are called as boundaries. Two cycles
representing the same homology class are said to be homologous.
4
Example Computations of Simplical Homology
The dimension of H0∆ (X), is equal to the number of path-connected components of X. The
simplest basis for H0∆ (X) consists of a choice of vertices in X, one in each path-component of
X. Likewise, the simplest basis for H1∆ (X) consists of loops in X, each of which surrounds a
different ‘hole’ in X. For example, if X is a graph, then H1∆ (X) is a measure of the number and
types of cycles in the graph. These concepts can be understood more clearly with the following
example.
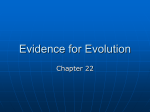
In Figure 2, a hollow doughnut-like two-dimensional surface, called a torus has been drawn.
Imagine that we cut this torus at the edges a and b, as depicted in the Figure. We flatten
the resulting surface on a plane, triangulate and label it as shown in the Figure. The resulting
triangulation is a valid ∆-complex. It is made of one 0-simplex v, three 1-simplices a, b and
c and two 2-simplices U and L. The arrows on the simplices indicate the orientations on the
simplices. Finally, note that it is possible to assemble a torus from this simplicial complex by
the identification of the multiple edges a and b, centered at v.
5
b
v
b
U
v
c
a
a
L
a
v
v
b
v
Figure 2: A torus [Left] and a ∆-complex [Right] corresponding to its triangulation T .
Let us start with the zero-th homology group. With only one vertex v, C0 (T ) ' Z. Similarly,
C1 (T ) ' Z ⊕ Z ⊕ Z, indicating the free group on the three edges a, b, c. Any c ∈ C1 (T ) can be
expressed as c = αa+βb+γc, where α, β, γ ∈ Z. Clearly, the boundary map ∂1 : C1 (T ) → C0 (T )
is zero. To see this, note that ∂1 (c) = α∂1 (a)+β∂1 (b)+γ∂1 (c) = α(v−v)+β(v−v)+γ(v−v) = 0.
Therefore,
H0∆ (T ) ' ker∂0 /im∂1 ' C0 (T ) ' Z.
This is consistent with the observation that the space has only connected component.
Consider another basis for C1 (T ) as {a, b, a + b − c}. Since ∂2 (U ) = ∂2 (L) = a + b − c, it follows
that
H1∆ (T ) ' ker∂1 /im∂2 ' Z ⊕ Z,
by modding out the component in the free group C1 (T ), corresponding to a + b − c. This leaves a
and b as the representative cycles for the two non-trivial homology classes in the first homology
group.
Since there are no simplices for dimension 3 or higher, Ck (T ) ' 0 for k > 2. From this it follows
that
H2∆ (T ) ' ker∂2 /im∂3 ' ker∂2 ' Z.
This is the free group generated by U − L, since for any αU + βL ∈ C2 (T ), ∂2 (αU + βL) =
(α + β)(a + b − c) = 0 if and only if α = −β. Finally, Hk∆ (T ) ' 0 for k > 2. To summarize,
Z ⊕ Z, for n = 1;
Z,
for n = 0.2;
Hn∆ (T ) '
0,
for n ≥ 0.
Note that each ∆-complex can be transformed into a simplicial complex (the likes of which
we have encountered in this work). This can be done using a technique called as barycentric
subdivision. It can be shown that the second barycentric subdivision of any ∆-complex produces
a simplicial complex, which is homeomorphic to the original ∆-complex. Without going into
details, it is enough to understand that the simplicial complexes are ∆-complexes whose simplices
are uniquely determined by their vertices. In ∆-complexes, this restriction is not in force.
This is the reason that the ∆-complex representation of the torus drawn in Figure 2 has only
two 2-simplices. A simplicial complex representation of the torus, however, would require at
6
least 14 triangles, 21 edges and 7 vertices. The ∆-complex representation, therefore makes the
computations much easier in many cases.
5
Singular Homology and Homotopy Invariance
Simplicial homology is a very powerful theory. However, there is a more elegant homology theory,
known as singular homology, which lets us study many questions in a more straightforward
manner. Many of the results developed in singular homology also carry for ∆-complexes and in
many cases for simplicial complexes as well. We introduce this theory below.
A singular n-simplex in a space X is a continuous map (instead of a set) given by σ : ∆n → X.
With the set of all such singular n-simplices as a basis, one can generate a free Abelian group
Cn (X),
P whose elements are called the chains. Each n-chain can be written as a finite formal
sum i ni σi for ni ∈ Z and σi : ∆n → X. Similarly the boundary map between singular chains
∂n : Cn (X) → Cn (X) is given by
X
∂n (σ) =
(−1)i σ|[v0 ,··· ,vˆi ,··· ,vn ] .
i
A similar proof to the one presented for simplicial homology shows that ∂n ∂n+1 = 0. Therefore,
the singular homology groups are given by
Hn (X) = ker ∂n /im ∂n+1 .
On the face of it, the singular homology theory looks very similar to simplicial homology. However, there are many subtle differences. We briefly summarize some results from singular homology theory which may have some analogs in simplicial homology, but are easier to derive in
the singular theory.
If of a space X has path-wise connected components Xα , then
Hn (X) ' ⊕α Hn (Xα ).
If X is path-wise connected, then H0 (X) ' Z. For a space with multiple components, H0 (X)
is a direct sum of Z’s for each component of X. If X is homotopic to a point, then Hn (X) = 0
for n > 0. For detailed proofs, please see [3].
We now present a result which is particularly important for this work: Spaces that are homotopy
equivalent have isomorphic homology groups.
Corresponding to each map between spaces f : X → Y , there is an induced homomorphism
between their respective chain groups denoted by f] : Hn (X) → Hn (Y ) for each n. This can be
defined in the following way. Since each singular n-simplex is given by σ : ∆n → X, we compose
it with f to get
f] (σ) = f σ : ∆n → Y.
7
This can extended linearly over any chain in Cn (X) to get
X
X
X
f] (
ni σi ) =
ni f] (σi ) =
ni f σi .
i
i
i
Let us now see how this maps behaves with the boundary operators.
Ã
!
X
i
f] ∂(σ) = f]
(−1) σ|[v0 ,··· ,vˆi ,··· ,vn ] ,
i
=
X
(−1)i f σ|[v0 ,··· ,vˆi ,··· ,vn ]
=
∂f] (σ).
i
This means that f] ∂ = ∂f] . Therefore, we have the following commutative diagram:
∂
···
→
Cn+1 (X) −→ Cn (X)
↓ f]
↓ f]
···
→
Cn+1 (Y )
∂
−→
Cn (Y )
∂
−→ Cn+1 (X)
↓ f]
∂
−→
Cn+1 (Y )
→ ···
→ ···
Consider a cycle α, i.e. ∂α = 0. Then
∂(f] α) = f] (∂α) = 0.
In other words, f] takes cycles in X to cycles in Y . Also, if ∂β is a boundary in X,
f] (∂β) = ∂(f] β),
which is boundary in Y . This proves that f] is a chain map, i.e. it induces a homomorphism
between the respective homology groups
f∗ : Hn (X) → Hn (Y ),
which satisfies two elementary properties
1. The identity map id : X → X induces the identity map id∗ on the homology groups.
g
f
2. The composition of two maps X −→ Y −→ Z induces the composition of the induced
homomorphisms: (gf )∗ = g∗ f∗ .
Finally, we give the following result.
Theorem 5.1 If two maps f, g : X → Y are homotopic, then they induce the same homomorphism f∗ = g∗ : Hn (X) → Hn (Y ).
8
For a detailed proof of this theorem, we refer the reader to [3]. The main ingredient of the proof
is a method of subdividing ∆n × [0, 1] into n + 1 simplices and the use of a certain prism operator
P as a chain homotopy between g] and f] . First, the following relation is derived.
∂P = g] − f] − P ∂.
Then, consider a cycle α ∈ Cn (X). Since ∂α = 0, we have
g] (α) − f] (α) = ∂P (α) + P ∂(alpha) = ∂P (α).
This means that g] (α) − f] (α) is a boundary, which means that both g] (α) and f] (α) define the
same homology class. Therefore f∗ (α) = g∗ (α), proving the theorem.
From these properties of f∗ , g∗ we immediately get our main result.
Corollary 5.1 The maps f∗ : Hn (X) → Hn (Y ) induced by a homotopy equivalence f : X → Y
are isomorphisms for all n.
6
Relative Homology Groups and Exact Sequences
Relative homology groups are useful tools for studying quotient spaces. Let A be a subspace of a
space X and denote by Cn (X, A) the quotient chain group Cn (X)/Cn (A). Therefore any chain
inside A is considered to be trivial in Cn (X, A). The boundary map ∂n : Cn (X) → Cn−1 (X)
induces a quotient boundary map ∂n : Cn (X, A) → Cn−1 (X, A). Here too, ∂n ∂n+1 = 0 holds.
Therefore one can define the relative homology groups, Hn (X, A) = ker ∂n /im ∂n+1 using these
boundary operators in exactly the same manner. It should be noted that
1. Elements of Hn (X, A) are called relative cycles. They are n-chains ξ ∈ Cn (X) such that
∂ξ ∈ Cn−1 (A).
2. A cycle α in called trivial , if it is a relative boundary. In other words, α = ∂β + γ for some
β ∈ Cn+1 (X) and γ ∈ Cn (A).
It can be shown that these chain groups satisfy the following commutative diagram.
0
→
0
→
Cn (A)
↓∂
i
−→
Cn (X)
↓∂
j
−→
Cn (X, A)
↓∂
→0
j
i
Cn−1 (A) −→ Cn−1 (X) −→ Cn−1 (X, A) → 0
where i is the inclusion map and j is a quotient map with respect to A. From this, it can be
shown that relative homology groups Hn (X, A) for any pair (X, A ⊂ X) satisfy the long exact
sequence
i
j∗
i
∂
∗
∗
· · · → Hn (A) −→
Hn (X) −→ Hn (X, A) −→ Hn−1 (A) −→
Hn−1 (X) → · · · → H0 (X, A) → 0
9
(Recall the definition of exactness from the first section on Abelian groups). Notice, that this
sequence is defined for any pair (X, A). One might wonder, as to why not define the homology
groups for the quotient space X/A directly. It can be shown that we do have a long exact
sequence,
i
j∗
∂
i
∗
∗
· · · → Hn (A) −→
Hn (X) −→ Hn (X/A) −→ Hn−1 (A) −→
Hn−1 (X) → · · ·
However, the existence of such a sequence requires that (X, A) is a good pair, namely that A is a
non-empty closed subspace that is a deformation retract of some neighborhood in X. The long
exact sequence for the relative homology groups, however, holds for any pair, and is therefore
preferred over the the exact sequence for the homology of the quotient space X/A.
Finally, it is appropriate to mention the equivalence of simplicial and singular homology for a
∆-complex X. One can define a homomorphism θ : ∆n (X) → Cn (X) between the two chain
groups by sending each n-simplex of X to its characteristic map σ : ∆n → X. From this one
can get a canonical homomorphism between the respective homology groups. One can prove the
following general result.
Theorem 6.1 The induced homomorphisms, Hn∆ (X, A) → Hn (X, A), are isomorphisms for all
n and all ∆-complex pairs (X, A).
For a detailed proof we refer the reader to [3].
References
[1] M. Armstrong, Basic Topology, Springer-Verlag, 1983.
[2] R. Bott and L. Tu, Differential Forms in Algebraic Topology Springer-Verlag, Berlin, 1982.
[3] A. Hatcher, Algebraic Topology, Cambridge University Press, 2002.
[4] T. Kaczynski, K. Mischaikow, and M. Mrozek, Computational Homology, Applied Mathematical Sciences 157, Springer-Verlag, 2004.
10