Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
N-body problem wikipedia , lookup
Routhian mechanics wikipedia , lookup
Analytical mechanics wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Old quantum theory wikipedia , lookup
Wave packet wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Spinodal decomposition wikipedia , lookup
Heat transfer physics wikipedia , lookup
Classical mechanics wikipedia , lookup
Brownian motion wikipedia , lookup
Renormalization group wikipedia , lookup
Centripetal force wikipedia , lookup
Seismometer wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Work (physics) wikipedia , lookup
Hunting oscillation wikipedia , lookup
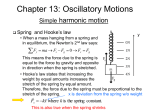
Periodic Motion or Oscillations Physics 232 Lecture 01 – 1 Periodic Motion Periodic Motion is motion that repeats about a point of stable equilibrium Stable Equilibrium Unstable Equilibrium A necessary requirement for periodic motion is a Restoring Force Physics 232 Lecture 01 – 2 Characteristics T A A Amplitude - A The maximum displacement from the equilibrium position Period - T The time to complete one cycle of motion, peak to peak or valley to valley Frequency - f The number of cycles per unit time Physics 232 f = 1 T Lecture 01 – 3 Simple Harmonic Motion Consider a mass m attached to a horizontal spring having a spring constant k with the spring unstretched We now pull the mass to the right and then let the mass go What is the subsequent motion of the mass? The restoring force is given by Hooke’s Law Physics 232 F = ma = − k x Lecture 01 – 4 Simple Harmonic Motion This is a second order differential equation d2x m 2 = −k x dt Since this is a second order differential equation, there are two constants of integration and the general solution is x = A cos(ω t + φ ) where A is the maximum displacement, φ is a phase angle, and ω is the angular velocity and is given by k ω= m A and φ are determined from the initial, boundary, conditions Physics 232 Lecture 01 – 5 Phase Angle φ Physics 232 Lecture 01 – 6 Simple Harmonic Motion The period of the motion is related to ω by 2π m T= = 2π k ω Note that the period of the motion is independent of the displacement! The velocity of the particle is given by dx v= = −ω A sin (ω t + φ ) dt with the maximum velocity being ω A Physics 232 Lecture 01 – 7 Simple Harmonic Motion We have so far that x = A cos(ω t + φ ) dx and v = = −ω A sin (ω t + φ ) dt The constants A and φ are determined from the initial conditions, that is what are x and v at a specified time or some other suitable initial conditions The maximum displacement occurs when the velocity is zero, which occurs at the extreme of motion (two locations: x = ±A) The maximum velocity occurs when the displacement from the equilibrium position is zero (two values: v = ±ωΑ) Physics 232 Lecture 01 – 8 SHM – Energy Considerations We assume that the system is isolated and frictionless With the force being given by F = − k x It can be shown that there is a potential energy in the system that is 1 2 U= kx 2 The total energy is then given by ETotal = KE + U 1 2 1 = m v + k x2 2 2 Physics 232 Lecture 01 – 9 SHM – Energy Considerations If we substitute for x and v we find that ETotal 1 = k A2 2 The total energy is constant The energy shifts back and forth between the kinetic energy and the potential energy, but with the sum of the two being constant Physics 232 Lecture 01 – 10 SHM – Energy Considerations The relationship between kinetic energy, potential energy, displacement, velocity and acceleration can be seen in the following diagram Physics 232 Lecture 01 – 11 Choice of Oscillatory Function Note that we used the cosine function in our development of Simple Harmonic Motion x = A cos(ω t + φ ) We could have also used the sine function for our description of SHM x = A sin (ω t + φ ') The only difference is in the phase angle Physics 232 Lecture 01 – 12 Simple Harmonic Motion Simple Harmonic Motion can be used to describe motion in many situations under appropriate approximations Any potential energy function that under appropriate circumstances can be approximated by a parabolic function will exhibit SHM Physics 232 Lecture 01 – 13 Simple Pendulum Consider a mass m suspended from a massless, unstretchable string of length L The forces acting on the mass are as shown The “restoring” force is the one perpendicular to the string Frestoring = − mg sin θ But this is a nonlinear function of θ However for small angles sin θ ≈ θ We then have that Frestoring = − mg θ Physics 232 Lecture 01 – 14 Simple Pendulum From before we have that Frestoring = − mg θ We also have that θ = xL This then yields that Frestoring If we then let k = mg mg =− x L L this is then becomes the equation of SHM 1 The frequency of oscillation is given by f = 2π g L which is independent of the mass attached to the string Physics 232 Lecture 01 – 15 Damped Motion Real life situations have dissipative forces The fact that there is a dissipative force, leads to motion that is damped, that is the amplitude decreases with time The dissipative force is often related to the velocity that is in the motion Fdiss = −bv The minus sign indicates that this force is in the opposite direction to the velocity The total force is then the sum of the restoring force and this dissipative force Fnet = − k x − b v Physics 232 Lecture 01 – 16 Damped Motion This net force leads to a slightly more complicated second order differential equation d2x dx m 2 + b + kx = 0 dt dt The exact solution to this equation depends upon the damping constant There are three possible solutions Physics 232 Underdamped: b < 2 km Critically Damped: b = 2 km Overdamped: b > 2 km Lecture 01 – 17 Damped Motion - Underdamped b < 2 km The general solution for this situation is given by 2 k b − x = Ae −(b / 2 m ) t cos(ω ' t + φ ) with ω ' = m 4m 2 This solution looks like The envelope is the the term describing the decreasing amplitude Envelope = Ae −(b / 2 m )t Physics 232 Lecture 01 – 18 Damped Motion- Critically Damped b = 2 km The general solution for this situation is given by b − 2 m t t e b x = A1 + 2m This solution looks like Physics 232 Lecture 01 – 19 Damped Motion - Overdamped b > 2 km The general solution for this situation is given by ( x = e −(b / 2 m ) t A1e −ω 2t + A2e −ω 2t ) b2 k with ω 2 = − 4m m This solution looks like Physics 232 Lecture 01 – 20 Damped Motion The most efficient damping, as far getting back to zero amplitude, is the critically damped case Note that the overdamped case may yield some interesting behavior depending on the relative values of the parameters Physics 232 Lecture 01 – 21 Forced Oscillation It is also possible to drive a system such as an oscillator with an external force that is also time varying The general differential equation is of the form d2x m 2 + k x + bv = Fmax cos ω d t dt where the term on the right hand side is the driving force This solution to this equation involves two functions, a complementary function and a particular solution Physics 232 Lecture 01 – 22 Forced Oscillation The solution is given by x (t ) = with (k Fmax ) + b2ωd2 2 2 − mωd −1 2ω d cos(ω d t − δ ) (b / 2m ) δ = tan 2 k m ω / − d δ represents the phase difference between the driving force and the resulting motion There can be a delay between the action of the driving force and the response of the system Physics 232 Lecture 01 – 23 Resonance The term in front of the cosine function represents the amplitude A= (k Fmax ) + b2ωd2 2 2 − mωd If we vary the angular velocity of the driving force, we find that the system has its maximum amplitude when k ωd ≈ m This phenomenon of the amplitude peaking at a driving frequency that is near the natural frequency of the system is known as resonance Physics 232 Lecture 01 – 24 Resonance The strength of the amplitude depends upon the magnitude of the damping coefficient The smaller the value of b the more pronounced the peak The larger the damping the peak becomes broader, less sharp, and shifts to lower frequencies If b > 2k m the peak disappears completely Physics 232 Lecture 01 – 25