Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
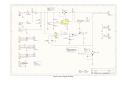
Power Board Design Notes 1 Circuit Functions The power supply board designed for the mobile robot has several functions. It: 1. Provides a connection point for the mobile robot battery; 2. Provides a connection point for an external power supply when the battery is disconnected for charging; 3. Provides +5V DC power at up to 1.5 A to be supplied to other hardware on the robot; 4. Provides a switch for turning the mobile robot power off and on; 5. Provides under-discharge protection to the battery; 6. Carries the Pololu 707 Dual VNH2SP30 Motor Driver board, allowing easy removal and replacement of the motor driver board, and provides power to it; 7. Provides connection points for motor driver signals, motor leads and encoder signals. 2 Circuit Design The circuit, SHOWN IN Figure 1, receives power either from the mobile robot battery via X1 or from and external power source such as a laboratory power supply via X8. D2 and D3 are provided to protect against reverse polarisation. The protection functions of the circuit are provided by the combination of U2, a Maxim Integrated MAX6499 limit controller, and Q2, an N-channel MOSFET. In operation, U2 monitors the input voltage, and turns Q2 on provided that the input voltage is between upper and lower voltage limits. The upper voltage limit is set by the R2-R3 resistor divider pair and the lower voltage limit is set by VR1. The upper voltage limit is set at 16.0 V as it has been reported (Pololu, 2015) that diode shoot-through limits practical operation to this voltage. The lower voltage limit is set at 11.0 V at X1to protect the battery from over-discharge. When Q2 is on, the input voltage is provided to X7, for connection to the input voltage terminals for the Pololu 707 Motor Driver board that is carried by the mobile robot power board. When Q2 is switched on, power is also provided to U1, a Murata Power Solutions OKI-78SR5 switching regulator with output rated at 5.0 V, 1.5 A. A switching regulator was chosen for reasons of efficiency. The +5 V output is available on connectors P3 and P5 and also powers the encoders that are fitted to the mobile robot gearmotors and the logic circuits of the Pololu 707 Motor Driver board. The ENABLE signal to the #SHDN input of U2 is controlled by the three-position switch SW1. With the switch in the centre position, R4 pulls this signal down and Q2 is off; neither motor power nor the +5 V logic power supply are active. When SW1 is in the left position, the robot power supply is in “Safe Mode”, where the +5 V logic supply is available but the motor power is disabled so the robot cannot move. When SW1 is in the right position, the robot power supply is in “Full Mode”, where both the +5 V logic supply and the motor power supply are available and the robot can move. The +0 V power line to X7 is also switched using Q1. Switching this line allows the motor power supply to the Pololu 707 Motor Driver board to be controlled by an external logic signal, ENABLE_MTR_PWR. This signal can be bypassed by bridging pins 1 and 2 on JP1. A logic level output, PWR_SW_FULL, is provided so that an external device can sense the state of the power switch. The signal PWR_SW_FULL is asserted when the power switch is in the “Full Mode” position. A Zener diode D1 clamps this signal to +5.0 V. Note that the Power Board is designed for use with a supervisory microcontroller. When pins 1-2 on JP1 are connected, the microcontroller input is bypassed and Q1 is always on so that the motors are enabled when SW1 is either in the Safe_Mode position or the Full_Mode position. To allow a microcontroller to manage the motor power, connect pins 2-3 on JP1. The microcontroller monitors the signal PWR_SW_FULL. This signal is logic 0 when the switch SW1 is in the Safe_Mode position and logic 1 when SW1 is in the Full_Mode position. When PWR_SW_FULL is logic 1 the microcontroller should assert signal ENABLE_MTR_PWR, turning on Q1 and enabling the motors. An external emergency stop could be added by putting a normally-closed switch in series with the ENABLE_MTR_PWR signal and opening this switch on E-Stop. 3 Connectors The following connections are provided. The Pololu 707 Motor Driver board plugs into connectors X2, X3 and X4. The is shown in Figure 2 Table 1: Battery power connector X1. Table 6: External power connector X9. Pin 1 2 Pin 1 2 3 Signal +11 V to +20.0 V Input +0.0 V Ground Signal +0.0 V Ground Battery Voltage Output +0.0 V Ground Table 2: Encoder 1 connector X5. Pin 1 2 3 4 Signal +5 V Supply to Encoder 1 Encoder 1 A Output Encoder 1 B Output +0.0 V Ground Table 7: Motor 1 signal connector P2. Pin 1 2 3 4 5 6 7 Table 3: Encoder 2 connector X6. Pin 1 2 3 4 Signal +5 V Supply to Encoder 2 Encoder 2 A Output Encoder 2 B Output +0.0 V Ground Table 8: Power connector P3. Pin 1 2 3 4 5 Table 4: Motor driver power connector X7. Pin 1 2 Signal + Motor Power Output Motor Power Ground Table 5: External power connector X8. Pin 1 2 Signal Motor 1 Enable Motor 1 Input A Motor 1 Input B Motor 1 PWM Input (no signal) Encoder 1 A Output Encoder 1 B Output Signal +12 V to +30 V input +0.0 V Ground 2 Signal Motor Driver Ve+ +0.0 V Ground +5 V Supply Output +0.0 V Ground Motor Driver Ve+ Table 9: Motor 2 signal connector P4. Pin 1 2 4 5 6 7 Table 10: Power control connector P5. Signal Motor 2 Enable Motor 2 Input A Motor 2 Input B Motor 2 PWM Input (no signal) Encoder 2 A Output Encoder 2 B Output Pin 1 2 3 4 Signal +5 V Supply Output ENABLE_MTR_PWR Input PWR_SW_FULL Output +0.0 V Ground 4 Printed Circuit Board The circuit board is a double-sided two-layer board with plated-through holes, containing a mixture of surface-mount and through-hole components. The board size is 110 mm x 28 mm. Most tracks are 10 mil1 (0.25 mm), with 10 mil (0.25 mm) clearance. High power tracks are wider, up to 80 mil (2.032 mm) Vias (through-board connections) are 50 mil (1.27 mm) with 28 mil (0.711 mm) holes. Several test points are provided. Pin 1 of all components is signified by a square pad – this is an industry convention. In addition, pin 1 of each polarised components is marked by a small dot, and pin 1 of each connector is marked by a small triangle on the silkscreen layer. The PCB component overlay is shown in Figure 1. Figure 1: Circuit board top side. 5 References —. MMSD701T1G SOD-123 Schottky Barrier Diodes (MMSD301T1/D). ON Semiconductor, 2011. —. OKI-78SR Series Fixed Output 1.5 Amp SIP DC/DC Converters (MDC_OKI-78SRW36.C03), Murata Power Solutions, 2014. —. NKK Series G ultra-miniature fully-illuminated toggle switches. NKK, nd. —. PMEG45A10EPD 45 V, 10 A low VF MEGA Schottky barrier rectifier. NXP Semiconductors, 2013. —. SZSMF5.0AT1G Series 200 W Transient Voltage Suppressor (SMF5.0AT1/D). ON Semiconductor, 2013. 1 A “mil” is 0.001 inch (0.0254 mm) 3 —. Vishay Siliconix Si4154DYN-Channel 40-V (D-S) MOSFET (65000), 2009. Horowitz, P & Hill, W. The Art of Electronics. Cambridge University Press, 2ed., 1989. Pololu. Dual VNH3SP30 Motor Driver Carrier MD03A. https://www.pololu.com/product/707/, accessed 10 September 2015. David Rye 13 September 2015 Para added in section 3 20 October 2015 Fig 2 updated 28 September 2015. 4 Figure 2: Power supply schematic.