Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Euclidean vector wikipedia , lookup
Quadratic form wikipedia , lookup
Tensor operator wikipedia , lookup
Jordan normal form wikipedia , lookup
Determinant wikipedia , lookup
Non-negative matrix factorization wikipedia , lookup
System of linear equations wikipedia , lookup
Cayley–Hamilton theorem wikipedia , lookup
Eigenvalues and eigenvectors wikipedia , lookup
Covariance and contravariance of vectors wikipedia , lookup
Gaussian elimination wikipedia , lookup
Singular-value decomposition wikipedia , lookup
Matrix calculus wikipedia , lookup
Matrix multiplication wikipedia , lookup
Cartesian tensor wikipedia , lookup
Bra–ket notation wikipedia , lookup
Four-vector wikipedia , lookup
MAT 202, Homework #7, Summer 2016 Name _______________________________________________
Instructions: Write your work up neatly and attach to this page. Use exact values unless specifically
asked to round. Show all work.
2
1
3
1. Show that the vectors 𝑢
⃗ 1 = [−3] , 𝑢
⃗ 2 = [ 2 ],𝑢
⃗ 3 = [1] form an orthogonal basis for ℝ3 . Make this
0
−1
4
5
basis an orthonormal basis, and then use that basis to find the representation of 𝑥 = [−3] in that
1
⃗𝑗
𝑥 ∙𝑢
basis using the formula 𝑥 = 𝑐1 𝑢
⃗ 1 + 𝑐2 𝑢
⃗ 2 + 𝑐3 𝑢
⃗ 3 𝑤ℎ𝑒𝑟𝑒 𝑐𝑗 = 𝑢⃗ ∙𝑢⃗ (𝑗 = 1,2,3).
𝑗
𝑗
2. Verify that the given set of vectors {u1,...,un} is orthogonal, and then write 𝑥 as a pair of vectors
𝑥∥ 𝑎𝑛𝑑 ⃗⃗⃗⃗
⃗⃗⃗
𝑥⊥ , with W defined as the span of the specified vectors and ⃗⃗⃗
𝑥∥ in W. What is the best
approximation to 𝑥 in W? What is the distance from the subspace to the point 𝑥 .
4
1
−2
1
−1
a. 𝑢
⃗ 1 = [2] , 𝑢
⃗ 2 = [ 1 ],𝑢
⃗ 3 = [ 1 ],𝑢
⃗ 4 = [ 1 ] , 𝑊 = 𝑆𝑝𝑎𝑛{𝑢
⃗ 1, 𝑢
⃗ 2, 𝑢
⃗ 3 }, 𝑥 = [ 5 ]
−3
1
−1
−2
1
1
1
−1
−2
3
b.
1
−1
−1
𝑢
⃗ 1 = [ 1] , 𝑢
⃗ 2 = [ 1 ] , 𝑊 = 𝑆𝑝𝑎𝑛{𝑢
⃗ 1, 𝑢
⃗ 2 }, 𝑥 = [ 4 ]
0
3
0
1
3
1
0
1
0
−1
c. 𝑢
⃗ 1 = [ ],𝑢
⃗ 2 = [ ],𝑢
⃗ 3 = [ ] , 𝑊 = 𝑆𝑝𝑎𝑛{𝑢
⃗ 1, 𝑢
⃗ 2, 𝑢
⃗ 3 }, 𝑥 = [4]
0
5
1
1
−1
1
−1
6
3. The given set is a basis for a subspace W. Use the Gram-Schmidt process to produce an orthogonal
basis for W.
3
−5
2
4
a. [−5] , [−1]
b. [−1] , [ 9 ]
2
−9
1
2
−1
3
5/6 −1/6
1/6
5/6
4. The columns of 𝑄 = [
] were obtained by applying the Gram-Schmidt process to the
−3/6 1/6
1/6 3/6
5
9
1
7 ]. Find an upper triangular matrix R such that A=QR. Check your work.
columns of 𝐴 = [
−3 −5
1 5
5. For each statement below determine if it is true or false. If the statement is false, briefly explain
why it is false and give the true statement.
a. If the columns of an nxp matrix U are orthonormal, then UUT𝑦 is the orthogonal projection of 𝑦
onto the column space of U.
𝑝
⃗ ∙𝑢
⃗𝑖
𝑦
𝑢
⃗⃗⃗
⃗𝑖 𝑖
𝑢𝑖 ∙𝑢
b. In the Orthogonal Decomposition Theorem, each term in the formula 𝑦∥ = ∑𝑖=1 ⃗
is itself
an orthogonal projection of 𝑦 onto a subspace of W.
c. If 𝐴 = 𝑄𝑅 where Q has orthonormal columns, then 𝑅 = 𝑄 𝑇 𝐴.
d. In a QR factorization, say A=QR (when A has linearly independent columns), the columns of Q
form an orthonormal basis for the column space of A.
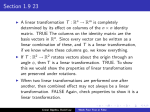
e. The range of a linear transformation is a vector space.
f.
If A is a 3x5 matrix and T is a linear transformation defined by T ( x) Ax , then domain of T is
𝑅 3.
g. Every linear transformation is a matrix transformation and every matrix transformation is a
linear transformation.
h. A linear transformation preserves the operations of vector addition and scalar multiplication.
i.
A linear transformation 𝑇: 𝑅 𝑛 → 𝑅 𝑚 is completely determined by its effects on the columns of
the nxn identity matrix.
j.
When two linear transformations are performed one after another, the combined effect may
not always be a linear transformation.
k. If A is a 3x2 matrix, then the transformation x
l.
Ax cannot be one-to-one.
The columns of the standard matrix for a linear transformation from 𝑇: 𝑅 𝑛 → 𝑅 𝑚 are the
images of the columns of the nxn identity matrix under T.
6. Let T be defined by T ( x) Ax . Find a vector x whose image under T is b , and determine
whether x is unique.
a.
b.
1
A
2
1
3
A
0
1
2
5
3
8
1
0
3
6
,
b
4
6
2
1
6
8
,b
3
2
8
10
7. How many rows and columns must a matrix have in order to define a mapping from 𝑅 5 into 𝑅 7 by
the rule T ( x) Ax .
1
3
2
and their images under the given
5
8. Use a rectangular coordinate system to plot u , v
transformation T. Describe geometrically what T does to each vector in𝑅 2. Plot each on a separate
graph. Label each transformation as one-to-one, onto, both or neither.
2
T ( x)
0
0
T ( x)
b.
1
a.
0 x1
2 x2
1 x1
0 x2
0 0 x1
T ( x)
0 3 x2
cos sin x1
,
d. T ( x)
3
sin cos x2
c.
cos
sin
e. T ( x)
sin x1
5
,
cos x2
4
9. An affine transformation 𝑇: 𝑅 𝑛 → 𝑅 𝑚 has the form T ( x) Ax b with A an mxn matrix and b in
𝑅 𝑚 . Show that T is not a linear transformation when b 0 .