Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
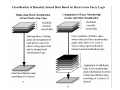
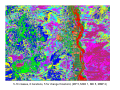
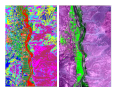
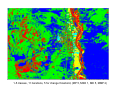
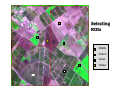
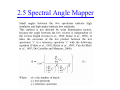
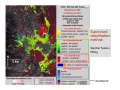
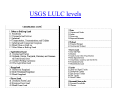
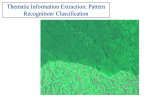
Pixel-based image classification Lecture 7 March 4, 2005 What is image classification or pattern recognition Is a process of classifying multispectral (hyperspectral) images into patterns of varying gray or assigned colors that represent either clusters of statistically different sets of multiband data, some of which can be correlated with separable classes/features/materials. This is the result of Unsupervised Classification, or numerical discriminators composed of these sets of data that have been grouped and specified by associating each with a particular class, etc. whose identity is known independently and which has representative areas (training sites) within the image where that class is located. This is the result of Supervised Classification. Spectral classes are those that are inherent in the remote sensor data and must be identified and then labeled by the analyst. Information classes are those that human beings define. unsupervised classification, The computer or algorithm automatically group pixels with similar spectral characteristics (means, standard deviations, covariance matrices, correlation matrices, etc.) into unique clusters according to some statistically determined criteria. The analyst then re-labels and combines the spectral clusters into information classes. supervised classification. Identify known a priori through a combination of fieldwork, map analysis, and personal experience as training sites; the spectral characteristics of these sites are used to train the classification algorithm for eventual land-cover mapping of the remainder of the image. Every pixel both within and outside the training sites is then evaluated and assigned to the class of which it has the highest likelihood of being a member. Hard vs. Fuzzy classification Supervised and unsupervised classification algorithms typically use hard classification logic to produce a classification map that consists of hard, discrete categories (e.g., forest, agriculture). Conversely, it is also possible to use fuzzy set classification logic, which takes into account the heterogeneous and imprecise nature (mix pixels) of the real world. Proportion of the m classes within a pixel (e.g., 10% bare soil, 10% shrub, 80% forest). Fuzzy classification schemes are not currently standardized. Pixel-based vs. Object-oriented classification In the past, most digital image classification was based on processing the entire scene pixel by pixel. This is commonly referred to as per-pixel (pixel-based) classification. Object-oriented classification techniques allow the analyst to decompose the scene into many relatively homogenous image objects (referred to as patches or segments) using a multiresolution image segmentation process. The various statistical characteristics of these homogeneous image objects in the scene are then subjected to traditional statistical or fuzzy logic classification. Object-oriented classification based on image segmentation is often used for the analysis of highspatial-resolution imagery (e.g., 1 × 1 m Space Imaging IKONOS and 0.61 × 0.61 m Digital Globe QuickBird). Knowledge-based information extraction: Artificial Intelligence Neural network Decision tree Support vector machine (SVM) … Purposes of classification Land use and land cover (LULC) Vegetation types Geologic terrains Mineral exploration Alteration mapping ……. 1. Unsupervised classification Uses statistical techniques to group n-dimensional data into their natural spectral clusters, and uses the iterative procedures label certain clusters as specific information classes K-mean and ISODATA For the first iteration arbitrary starting values (i.e., the cluster properties) have to be selected. These initial values can influence the outcome of the classification. In general, both methods assign first arbitrary initial cluster values. The second step classifies each pixel to the closest cluster. In the third step the new cluster mean vectors are calculated based on all the pixels in one cluster. The second and third steps are repeated until the "change" between the iteration is small. The "change" can be defined in several different ways, either by measuring the distances of the mean cluster vector have changed from one iteration to another or by the percentage of pixels that have changed between iterations. The ISODATA algorithm has some further refinements by splitting and merging of clusters. Clusters are merged if either the number of members (pixel) in a cluster is less than a certain threshold or if the centers of two clusters are closer than a certain threshold. Clusters are split into two different clusters if the cluster standard deviation exceeds a predefined value and the number of members (pixels) is twice the threshold for the minimum number of members. ISODATA: Initial Cluster Values (properties) number of classes maximum iterations pixel change threshold (0 - 100%) (The change threshold is used to end the iterative process when the number of pixels in each class changes by less than the threshold. The classification will end when either this threshold is met or the maximum number of iterations has been reached) initializing from statistics (Erdas) or from input (ENVI) (the initial values to put in for ENVI are minimum # pixel in class, maximum class stdv, minimum class distance, maximum # merge pairs) 5-10 classes, 8 iterations, 5 for change threshold, (MP 5, MSD 1, MD 5, MMP 2) 1-5 classes, 11 iterations, 5 for change threshold, (MP 5, MSD 1, MD 5, MMP 2) 5 classes 10 classes 2. Supervised classification: training sites selection Based on known a priori through a combination of fieldwork, map analysis, and personal experience on-screen selection of polygonal training data (ROI), and/or on-screen seeding of training data (ENVI does not have this, Erdas Imagine does). The seed program begins at a single x, y location and evaluates neighboring pixel values in all bands of interest. Using criteria specified by the analyst, the seed algorithm expands outward like an amoeba as long as it finds pixels with spectral characteristics similar to the original seed pixel. This is a very effective way of collecting homogeneous training information. From spectral library of field measurements Statistic extraction of each training site Each Each pixel pixel inin each each training training site site associated associated with with aa particular particular class class (c) (c) isis represented Average of of all all pixels pixels inin aa represented by by aa measurement measurement vector, vector, XXc;c; Average training covariancematrix matrixof ofVVc. . trainingsite sitecalled calledmean meanvector, vector,M Mc;;aacovariance c ⎡ BVi , j ,1 ⎤ ⎢ ⎥ BV ⎢ i, j ,2 ⎥ ⎢ BV ⎥ X c = ⎢ i , j ,3 ⎥ ⎢. ⎥ ⎢ ⎥ . ⎢ ⎥ ⎢ BVi , j ,k ⎥ ⎣ ⎦ ⎡ µ c1 ⎤ ⎢µ ⎥ ⎢ c2 ⎥ ⎢µc3 ⎥ Mc = ⎢ ⎥ ⎢. ⎥ ⎢. ⎥ ⎢ ⎥ ⎢⎣ µ ck ⎥⎦ c ⎡cov c11 cov c12 ... cov c1k ⎤ ⎢cov cov ... cov ⎥ c 22 c2k ⎥ ⎢ c 21 ⎥ Vc = ⎢. ⎢ ⎥ . ⎢ ⎥ ⎢cov ck1 cov ck 2 ... cov ckk ⎥ ⎣ ⎦ ththpixel in band k. where isisthe brightness value for the i,j whereBV BVi,j,k the brightness value for the i,j pixel in band k. i,j,k µµck represents the mean value of all pixels obtained for class c in band k. ck represents the mean value of all pixels obtained for class c in band k. Cov Covckl isisthe thecovariance covarianceof ofclass classccbetween betweenbands bandsl lthrough throughk.k. ckl Selecting ROIs Alfalfa Cotton Grass Fallow Spectra of ROIs from ETM+ image Spectra from library Resampled to match TM/ETM+, 6 bands Supervised classification methods Various supervised classification algorithms may be used to assign an unknown pixel to one of m possible classes. The choice of a particular classifier or decision rule depends on the nature of the input data and the desired output. Parametric classification algorithms assumes that the observed measurement vectors Xc obtained for each class in each spectral band during the training phase of the supervised classification are Gaussian; that is, they are normally distributed. Nonparametric classification algorithms make no such assumption. Several widely adopted nonparametric classification algorithms include: one-dimensional density slicing parallepiped, minimum distance, nearest-neighbor, and neural network and expert system analysis. The most widely adopted parametric classification algorithms is the: maximum likelihood. Hyperspectral classification methods Binary Encoding Spectral Angle Mapper Matched Filtering Spectral Feature Fitting Linear Spectral Unmixing 2.1 Parallepiped This is a widely used digital image classification decision rule based on simple Boolean “and/or” logic. µ ck − σ ck ≤ BVijk ≤ µ ck + σ ck Lck ≤ BVijk ≤ H ck If a pixel value lies above the low threshold and below the high threshold for all n bands being classified, it is assigned to that class. If the pixel value falls in multiple classes, ENVI assigns the pixel to the last class matched. Areas that do not fall within any of the parallelepipeds are designated as unclassified. In ENVI, you can use 1-3σ Scann a table here p372 2.2 Minimum distance The Thedistance distanceused usedininaaminimum minimum distance distancetotomeans meansclassification classification algorithm algorithmcan cantake taketwo twoforms: forms:the the ( ) ( ) Dist = BV − µ + BV − µ Euclidean Euclideandistance distancebased basedon onthe the Pythagorean Pythagoreantheorem theoremand andthe the “round “roundthe theblock” block”distance. distance.The The Euclidean Euclideandistance distanceisismore more computationally computationallyintensive, intensive,but butititisis more morefrequently frequentlyused used 2 ijk Dist = (BV ijk − µ ck ) + (BVijl − µ cl ) 2 2 Dist = All pixels are classified to the nearest class unless a standard deviation or distance threshold is specified, in which case some pixels may be unclassified if they do not meet the selected criteria. (BV ijk ck 2 ijl cl − µ ck ) + (BVijl − µ cl ) 2 2 e.g. the distance of point a to class forest is Dist = (40 − 39.1)2 + (40 − 35.5)2 = 4.6 2.3 Maximum likelihood Instead based on training class multispectral distance measurements, the maximum likelihood decision rule is based on probability. The maximum likelihood procedure assumes that each training class in each band are normally distributed (Gaussian). Training data with bi- or n-modal histograms in a single band are not ideal. In such cases the individual modes probably represent unique classes that should be trained upon individually and labeled as separate training classes. the probability of a pixel belonging to each of a predefined set of m classes is calculated, and the pixel is then assigned to the class for which the probability is the highest. probability The Theestimated estimatedprobability probabilitydensity densityfunction functionfor forclass classwwi i(e.g., (e.g.,forest) forest)isiscomputed computedusing using the theequation: equation: ⎡ 1 ( x − µˆ i )2 ⎤ exp ⎢− pˆ ( x | wi ) = ⎥ 2 1 2 ˆ σi ⎦ (2π )2 σˆ i ⎣ 1 where er, xx whereexp exp[[]]isisee(the (thebase baseof ofthe thenatural naturallogarithms) logarithms)raised raisedtotothe thecomputed computedpow power, isisone the xx-axis, -axis, µ̂i isisthe oneof ofthe thebrightness brightnessvalues valueson on the theestimated estimatedmean meanof ofall allthe thevalues values 2 ˆ σ ininthe e of theforest foresttraining trainingclass, class,and and i isisthe theestimated estimatedvarianc variance ofall allthe themeasurements measurementsinin this this class. class. Therefore, Therefore, we we need need toto store store only only the the mean mean and and variance variance ofof each each training training class ted with class (e.g., (e.g., forest) forest) toto compute compute the the probability probability function function associa associated with any any ofof the the individual valuesininit. it. individualbrightness brightnessvalues For Formultiple multiplebands bandsof ofremote remotesensor sensordata datafor forthe theclasses classesof ofinterest, interest,we wecompute computean annndimensional dimensionalmultivariate multivariatenormal normaldensity densityfunction functionusing: using: p( X | wi ) = 1 (2π ) n 2 | Vi | 1 2 ⎤ ⎡ 1 T −1 ( ) ( ) exp ⎢− X − M i Vi X − M i ⎥ ⎦ ⎣ 2 Vi −1 where isisthe isisthe inverse of where thedeterminant determinantof ofthe thecovariance covariancematrix, matrix, the inverse ofthe the ( ) X − M T i covariance . .The covariancematrix, matrix,and and ( X − M i ) isisthe thetranspose transposeof ofthe thevector vector Themean mean vectors vectors(M (Mi)i)and andcovariance covariancematrix matrix(V (Vi)i)for foreach eachclass classare areestimated estimatedfrom fromthe thetraining training data. data. | Vi | IfIf we we assume assume that that there there are are mm classes, classes, then then p(X/w p(X/wi)i) isis the the probability probability density density function function associated associated with with the the unknown unknown measurement measurement vector vectorX, X,given giventhat thatXXisisfrom fromaapattern patternininclass class wwi. . InIn this this case case the the maximum maximum likelihood likelihood i decision decisionrule rulebecomes: becomes: X ∈ w i if, and only if, Decide Decide if, and only if, p( X | wi ) ⋅ p(wi ) ≥ p(X | w j )⋅ p(w j ) for forall alli iand andj jout outofof1,1,2,2,......mmpossible possibleclasses. classes. Without Prior Probability Information: Decide unknown measurement vector X is in class i if, and only if, pi > pj for all i and j out of 1, 2, ... m possible classes and pi = 1 ⎡1 ⎤ T −1 log e | Vi | − ⎢ ( X − M i ) Vi ( X − M i )⎥ 2 ⎣2 ⎦ Therefore, Therefore, toto classify classify aa pixel pixel inin the the multispectral multispectral remote remote sensing sensing dataset dataset with with an an unknown unknown measurement measurement vector vector X, X, aa maximum maximum likelihood likelihooddecision decisionrule rulecomputes computesthe theproduct product for for each each class class and and assigns assigns the the pattern pattern toto the the class classhaving havingthe thelargest largestproduct. product.This Thisassumes assumes that that we we have have some some useful useful information information about about the the prior prior probabilities probabilities ofof each each class class i i (i.e., (i.e., p(w p(wi)). )). i Unless you select a probability threshold (0-1), all pixels are classified. Each pixel is assigned to the class that has the highest probability 2.4 Mahalanobis Distance M-distance is similar to the Euclidian distance Dist = ( X − M i )T • V −1i • ( X − M i ) It is similar to the Maximum Likelihood classification but assumes all class covariances are equal and therefore is a faster method. All pixels are classified to the closest ROI class unless you specify a distance threshold, in which case some pixels may be unclassified if they do not meet the threshold (in DN number) 2.5 Spectral Angle Mapper 2.6 Spectral Feature Fitting compare the fit of image spectra to selected reference spectra using a least-squares technique. technique SFF is an absorption-featurebased methodology. The reference spectra are scaled to match the image spectra after continuum removal from both data sets. A scale image is output for each reference spectrum and is a measure of absorption feature depth which is related to material abundance. The image and reference spectra are compared at each selected wavelength in a least-squares sense and the root mean square (rms) error is determined for each reference spectrum. Supervised classification method: Spectral Feature Fitting Source: http://popo.jpl.nasa .gov/html/data.html 3. Application: LULC classification Land cover refers to the type of material present on the landscape (e.g., water, sand, crops, forest, wetland, humanmade materials such as asphalt). Land use refers to what people do on the land surface (e.g., agriculture, commerce, settlement). The pace, magnitude, and scale of human alterations of the Earth’s land surface are unprecedented in human history. Therefore, land-cover and land-use data are central to such United Nations’ Agenda 21 issues as combating deforestation, managing sustainable settlement growth, and protecting the quality and supply of water resources. USGS LULC levels MODIS globe land cover product (1km) Landcover: MOD12Q1 (96 days) Land cover dynamics: MOD12Q2 water 0 evergreen needleleaf forest 1 evergreen broadleaf forest 2 deciduous needleleaf forest 3 deciduous broadleaf forest 4 mixed forests 5 closed shrubland 6 open shrubland 7 woody savannas 8 savannas 9 grasslands 10 permanent wetlands 11 croplands 12 urban and built-up 13 cropland/natural vegetation mosaic 14 snow and ice 15 barren or sparsely vegetated 16 unclassified 254