Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Brics
“ Uncertainty comes in many forms and in real world problems it is usually
impossible to avoid uncertainties. Further looking towards the design of
intelligent systems, one of the common problems is “ how to handle
uncertain, imprecise, and incomplete information ?” So that resulting
designed system come closer to the human intelligence level.”
Handling Uncertainties - using Probability Theory
to Possibility Theory
By Ashutosh Dwivedi, D Mishra and Prem k Kalra
1. Introduction
Uncertainty comes in many forms and in the
real world problems it is usually impossible to
avoid uncertainties. At the empirical level,
uncertainties are associated with the
measurement errors and resolution limits of
measuring instruments. At the cognitive level, it
emerges from the vagueness and ambiguities
in natural language. At the social level, it is
created and maintained by people for
different purposes (e.g. privacy, secrecy etc.).
The processing of uncertainties in the
information’s have always been a hot topic of
research since mainly the 18th century. Up to
middle of the 20th century, most theoretical
advances were devoted to the theory of
probabilities through the works of eminent
mathematicians like J. Bernoulli (1713), A. De
Moivre (1718), T. Bayes (1763), P. Laplace
(1774), K. Gauss (1823), S. Poisson (1837), E.
Borel (1909), R. Fisher (1930), A.
Kolmogorov (1933), B. De Finetti (1958), L.
Savage (1967), T. Fine (1973), E. Jaynes
(1995), to name just few of them.
The second half of the 20th century had
become very prolific for the development of
new original theories dealing with
uncertainties and imprecise information’s.
Mainly three major theories are available now as
alternative of the theory of probability for
the automatic plausible reasoning in expert
systems: the fuzzy set theory developed by
L. Zadeh in sixties (1965), the Shafer’s
theory of evidence in seventies (1976) and
the theory of possibilities by D. Dubois
and H. Prade in eighties (1985).
2. Sources of Uncertainties and Inexact
Information
The sources of uncertainty can be given as
follows:
2.1. Incomplete Domain Knowledge
The knowledge about the domain in which
work is done may be imprecise or incomplete.
Incomplete domain knowledge compels to
use some form of rules or heuristics, which
may not always give appropriate or correct
results as outcome of the work.
2.2. Noisy and Conflicting Data
Any data when it is collected with some
purpose will always not be accurate and
complete. Evidences from different sources
may be conflicting or noisy. For example it
can be shown that the statement “Ram is tall”
is vague and results in sources of uncertainty.
Suppose given a number x represents the
height of Ram in feets then x, xÎ [0,8] is given.
It is to be decided if this number is large
enough to decide the tallness of a person or
not. One way to answer this question is that if
x ³ d , (where d is some threshold or limit)
then it is large enough to say that a person is
tall else he is not. Second way can be thought
as to mark either agree or disagree or place no
mark based on subjective knowledge of
source and this arises the uncertainty whether
is large. Another way is to create a scale of
measurement. If we are on one end of the
scale then we completely disagree and if we
are on another extreme end then we
completely agree. But if we are in between,
we have some value associated with our
measurement. Thus there is a lack of sharp
boundaries for the result.
2.3 Incomplete Information
It occurs when a factor in a decision or model
1
is not known. Sometimes it can be resolved
(through research, enquiry etc.) but not always.
Some factors are necessarily uncertain because
they are indeterminate, e.g. all future
developments. Sometimes they may be
determinate but not practically measurable.
Factors or parameters change with time, hence
it also produces a kind of incomplete
information which further leads to uncertainty.
2.4 Selection among the alternatives
When we have a situation where there are
several alternatives available, there may be
disagreement in a choosing among several
alternatives. This procedure also leads to
uncertainty.
Arising from interpretation of data by a
person.
(B) Linguistic Uncertainty
(i) Vagueness
(ii) Ambiguity
(iii) Context Dependency
(Iv) Nonspecificity
Human reasoning often involves inexact
information. The sources and the nature of
inexact information may be different for
different problem domain. For example the
possible logical sources of the inexactness of
information for the medical domain are:
Lack of adequate data
Inconsistency of data
·
Inherent human fuzzy concept
·
Matching of similar situations
·
Different opinions
Ignorance
·
·
Lack of available theory to describe a
particular situation
·
·
2.5 Linguistic Imprecision
In real world people share their thoughts by
speaking. People often make use of imprecise
terms to express their own subjective
knowledge. But when such imprecise terms are
interpreted by others, who are not familiar with
the meaning or their context changes, this
situations may lead to uncertainty. There are
mainly two types of uncertainty as proposed by
Regan (2002). The first one is called as Epistemic
Uncertainty (indeterminate facts) and other one
is Linguistic Uncertainty (indeterminacy in
language).
(A) Epistemic Uncertainty Following factors can
be considered the causes of such uncertainties.
(i) Systematic error
It is the result of bias or miscalibrationc in
experiment while doing some experimentation.
(ii)Measurement error
It is nothing but imprecision or inaccuracy in
the measurement procedure itself.
(iii) Natural Variation
This is due to the unpredictable changes that
occur in surroundings.
(iv) Inherent Randomness
This is due to the factors contributing (i), (ii) or
(iii) or combination of them.
(v) Imperfect Data
The data or information used in decision
making procedure may be corrupt and
imperfect which further leads to wrong
decision.
(vi)Subjective Judgment
2
For example, at the starting of the consultation
session, a doctor asks the patient and the
person accompanying him/her about the
condition of the patient. When the patient
describes his/her situation, there are
inexactness of informations such as source of
disease, period of suffering or about symptoms
of disease and the doctor has to deal with this
kind of incomplete, inexact information’s.
Thus the proper management of inexact
information is necessary for decision making.
3. Methods to Handle Uncertainties
Different methods for handling uncertainties
are as follows:
1. Probability Theory
2.Certainty Factor
3.Dempster Shafer Theory of Evidence
4.Possibility Theory
3.1 Probability Theory
Probability has been discussed for a long time.
Indeed, the arguments go back over two or
three centuries. There are three schools of
thought, each leading to approximately similar
mathematical methods.
Three views of probability:
• Frequentist
• Mathematical
• Bayesian (knowledge-based)
One school of thought treats the word
"Probability" as a synonym for "frequency" or
"fraction" of events. If we are trying to
determine the fraction of defects in a lot (an
enumerative problem), we imagine that the lot
before us has been drawn at random for a
"super lot", that is, a lot of lots. Then we
sample it and based on the sample, attempt to
say something useful about the entire lot and,
by inference, the characteristics of the "super
lot".
2
Other people like the "long run frequency"
interpretation. The idea is that if we were to
repeat what we are doing, over and over again,
if only in our head, we can imagine that the
fraction of defects (or whatever we are finding)
is in some way, the "probability".
There are the "equal a-priori" thinkers, who,
like Laplace, considered that every problem
could be considered broken into cases, which
had "equal a-priori probability". Tossing of
dice or dealing of cards are some examples.
Then there are the "subjectivists" who are
Bayesians, but they start from a different basis.
They say that the probability measures strength
of belief. To them a probability assignment
represents a logical combination of what we
believe and what the data tell us to believe. As a
result, the end up using Bayes equation and,
except for the way they get started on a
problem. The math is similar but, again, there
are important differences in the way they would
formulate the problem and how they take into
account fact, what is known and what is
unknown. This debate continues to occur
among the Bayesian community.
Probability represents a unique encoding of
incomplete information. The essential task of
probability theory is to provide methods for
translating incomplete information into this
code. The code is unique because it provides a
method, which satisfies the following set of
properties for any system:
(a) If a problem can be solved in more than
one way, all ways must lead to the same answer.
(b) The question posed and the way the answer
is found must be totally transparent. There
must be no "laps of faith" required to
understand how the answer followed from the
given information’s.
(c) The methods of solution must not be "adhoc". They must be general and admit to being
used for any problem, not just a limited class of
problems. Moreover the applications must be
totally honest. For example, it is not proper for
someone to present incomplete information,
develop an answer and then prove that the
answer is incorrect because in the light of
additional information a different answer is
obtained.
(d)The process should not introduce
information that is not present in the original
statement of the problem.
3.1.1. Basic terminologies used in Probability Theory
and Uncertainty handling using probability theory
(through example):
(a) The Axioms of Probability
The language system of probability theory, as
most other systems, contains a set of axioms
(un-provable statements which are known to
be true in all cases) that are used to constrain
the probabilities assigned to events. Three
axioms of probability are as follows:
1. All values of probabilities are between zero
and one i.e. A[0 P ( A) 1]
2. Probabilities of an event that are necessarily
true have a value of one, and those that are
necessarily false have a value of zero i.e.
P (True ) 1 and P ( False) 0 .
3. The probability of a disjunction is given by:
A, B[ P ( A B ) P ( A) P ( B ) P ( A B )
An important result of these axioms is
calculating the negation of a probability of an
event . If we know that P ( A) 0.55 then it
follows from these axioms that,
P ( A) 1 P ( A) 0.45 .
(b) The Joint Probability Distribution
The joint probability distribution is a function
that specifies a probability of certain state of
the domain given the states of each variable in
the domain. Suppose that our domain consists
3
Of three random variables or atomic events
{x1 , x2 , x3 } . Then an example of the joint
probability distribution of this
domain where x1 = 1, x2 0 and x3 = 1 would
be P( x1 , x2 , x3 ) = some value depending upon
the values of different probabilities of x1 , x2
and x3 . The joint probability distribution will
be one of the many distributions that can be
calculated using a probabilistic reasoning
system.
(c) Conditional Probability and Bayes'
Rule
Suppose a rational agent begins to perceive
data from its world, it stores this data as
evidence. This evidence is used to calculate a
posterior or conditional probability which will
be more accurate than the probability of an
atomic event without this evidence (known as a
prior or unconditional probability).
Example:
-The probability that a car can start is 0.96 .
-The probability that a car can move is 0.94.
-The probability that a car both starts and
moves is 0.91.
Now suppose that the agent perceives
information that the car starts. The agent can
now calculate a more accurate probability that
the car moves given that the car started.
Ø
What is the probability that the car moves given
that the car starts?
In order to calculate the example above, we
need a mathematical formula to relate the
conditional probability to the probability of
the given atomic event, and the probability of
the conjunction of the two events occurring.
Lets define:
P( A | B ) = Probability of
happening of A where
B has already happened.
P( A Ç B) =Probability of happening of A & B at
same time.
P( B) = Probability of happening of B alone.
So the relation
P (A / B) =
P( A Ç B)
P(B)
(1)
Now using this equation for conditional
probability, to calculate our example:
4
P ( moves | starts ) =
P ( moves Ç starts )
P(starts )
0.91
=
= 0.95(approx )
0.96
The agent would be able to update the prior
probability of the car moving from 0.94 to 0.95
after perceiving the evidence that the car
started. Algebraic manipulation of the
equation for conditional probability yields the
product rule.
P ( A Ç B) = P( A | B).P( B)
And , since
P( A | B) =
P ( A Ç B) = P( B Ç A)
P( B | A).P( A)
P( B)
Using the equations for the product rule above,
and since P( A Ç B) = P( B Ç A) , we can now
derive Baye’s Rule as:
(2)
P( B | A).P( A)
P( A | B) =
P( B)
Baye’s Rule is of great importance in practice.
Using the example above again, let us add the
knowledge that the probability that the car
moves given that the car starts is 0.95. We can
now find the probability that the car starts given that the
car moves.
P(moves | starts ).P( starts )
P(moves )
0.95 ´ 0.96
=
= 0.97(approx)
0.94
P( starts | moves ) =
(D) Conditional Independence
When the result of one atomic event, A, does
not affect the result of another atomic event, B,
those two atomic events are know to be
independent of each other and this helps to
resolve the uncertainty. This relationship has
the following mathematical property :
P( A, B) = P( A).P( B)
Another mathematical implication is that
P( A | B) = P( A)
Independence can be extended to explain
irrelevant data in conditional relationships. In
previous example, assume that we want to
know the probability of a car starting. We are
given information that the car's spark plugs
fire, and that the battery is charged,
P (starts|sparkplugs Ç battery).
therefore irrelevant to finding the probability
that the car starts.
P (starts | sparkplugs Ç battery )
= P( starts | sparkplugs )
Advanta ges and Pr oblems with
Probabilistic Method:
Advantages
(1) Formal foundation
(2) Reflection of reality (a posteriori)
(3)Well-defined semantics for decision
making
Problems
(1) This may be inappropriate.
• The future is not always similar to the past.
(2) Complex data handling
• Requires large amounts of probability data.
• Non-sufficient sample sizes.
(3) Inexact or incorrect
•Especially for subjective probabilities.
•Subjective evidence may not be reliable.
(4) Ignorance
•Probabilities must be assigned even if no
information is available.
•Assigns an equal amount of probability to all
such items.
•Independence of evidences assumption often
not valid.
(5) Non-local reasoning
•Requires the consideration of all available
evidence, not only from the rules currently
under consideration.
•High computational overhead.
(6) No compositionality
•Complex statements with conditional
dependencies cannot be decomposed into
independent parts.
•Relationship between hypothesis and
evidence is reduced to a number.
(7)Always requires prior probabilities which
are very hard to found out apriori.
3.2. Certainty Factor
Certainty factor is used to express how
accurate, truthful or reliable you judge a
predicate to be. This issue is how to combine
various judgments. It is neither a probability
nor a truth value but a number that reflects the
overall belief in a hypothesis given available
information. It may apply both to facts and to
rules, or rather to the conclusion(s) of rules.
They are logic and rules which provide all or
nothing answers.
Decision is based on evidences and
interpretation of evidences is subjective. Idea
here is to minimize amount of computation
required to update the probability, as evidences
are accumulated incrementally. Approach used
is to model human expert belief about events
rather than probabilities of events. Probability
described frequency of occurrence of
reproducible events but in CF we represent
amount of support for a particular fact based
on some other facts. Probability does not
account for positive and negative examples but
CF does.
CF (Certainty factor) denotes the belief in a
hypothesis H given that some pieces of
evidence E are observed. No statement about
the belief means that no evidence i.e.
separation of belief, disbelief, ignorance is
possible. It ranges from -1 to +1 (Scale on same
range) where
CF=-1 no belief at all in the hypothesis (H)
CF= +1 fully believes the hypothesis (H)
CF=0 nothing is known about the hypothesis
(H)
Certainty factor combine belief and disbelief
into a single number based on some evidence.
Strength of the belief or disbelief in H
depends on the kind of the observed evidence
E:
MB( H , E ) - MD( H , E )
CF ( H , E ) =
1 - min[ MB( H , E ) - MD( H , E )]
MB is a measure of belief, MD is a measure
of disbelief. Suppose MB( E ® H ) = 0.7 and
MB( E ® H ' ) = -0.3. In probability theory this
is true but not in CF.
• Positive CF implies evidence support
hypothesis since MB < MD
• CF of 1 means evidence definitely supports
the hypothesis.
• CF of 0 means either there is no evidence
or that the belief is cancelled out by the
disbelief.
• Negative CF implies that the evidence favors
negation of hypothesis since MB < MD
5
Certainty Factor Algebra :
There are rules to combine CFs of several
facts:
Interpretation of CF value:
Uncertain terms
Definitely Not
Almost Not
Probably Not
May be not
Unknown
May be
Probably
Almost Certain
Definitely
(CF ( x1 ) AND CF ( x2 ) = min(CF ( x1 ), CF ( x2 ))
(CF ( x1 ) OR CF ( x2 ) = max(CF ( x1 ), CF ( x2 ))
A rule may also have a certainty factor
CF (rule) .
CF (action) = CF (condition) * CF (rule)
Consequent of multiple rules: Suppose the
following
IF A is X THEN C is Z
IF B is Y THEN C is Z
What certainty should be attached to C having Z if
both rules are fired?
CFR1 (C ) + CFR2 (C ) - CFR1 (C )* CFR2 (C )
When CFR (C ) and CFR2 ( C ) are both
1
positive
CFR1 (C) CFR2 (C) CFR1 (C)*CFR2 (C)
When
CFR1 (C) and CFR2 (C) are both
negative
CFR1 (C) + CFR2 (C)
1- min[| CFR1 (C) |,| CFR2 (C) |]
When
CFR1 (C ) and CFR2 (C ) are of
opposite sign
Where, CFR (C ) is the confidence in hypothesis
established by Rule 1 and CFR (C ) is the
confidence in hypothesis established by Rule 2.
CF
-1
-0.8
-0.6
-0.4
-0.2 or 0.0
0.4
0.6
0.8
1
Difficulties with certainty Factors
•Results may depend on the order in which
evidences are considered in some cases. For
example:
Suppose CF ( A) = 0.4, CF ( B1 ) = 0.3 and
CF ( B2 ) = 0.6
( A Ç ( B1 È B2 ) is C
If
then it is evaluated as
CF (C )= min(0.4,max(0.3,0.6)) = min(0.4,0.6) = 0.4
If they are evaluated as follows :
( A Ç B1 then CF(C(1)))
and if
( A Ç B2 then CF(C(1)))
Then
CF(C) = 0.3 + 0.4 - 0.3 ´ 0.4 = 0.58
Thus, the results vary with the way in which the
evidences are considered.
• Combination of non-independent evidences
is unsatisfactory.
• New knowledge may require changes in the
certainty factors of existing knowledge.
• Not suitable for long increase chains.
Comparison of Certainty Factors with
Probability Theory
1
2
Example
CF(Sheep is a dog) = 0.7;
CF(Sheep has wings) = -0.5
CF(Sheep is a dog and has wings) = min(0.7, 0.5) = -0.5
Suppose there is a rule. If x has wings then x is a
bird. Let the CF of this rule be 0.8
If (Sheep has wings) then (Sheep is a bird)
= -0.5 * 0.8 = -0.4
6
•Probability theory is used in areas where
statistical data is available whereas certainty
factors are used in the areas where expert’s
judgments are used.
e.g., Diagnosis of disease.
•Assumptions of conditional independence
cannot be made.
•In probability theory Measure of Beliefs:
(MB(Evidence->Hypothesis + MB (Evidence> Not hypothesis) = 1. But in certainty factor
this is not true.
•Sometimes when two events A and B are
given then CF(A B) = CF(A B) .
•Used in cases where probabilities are not
known or too difficult or expansive to obtain.
3.3. Dempster-Shafer Theory of Evidence
Dempster-Shafer Theory (DST) is a
mathematical theory of evidence. The seminal
work on the subject is done by Shafer [Shafer,
1976], which is an expansion of previous work
done by Dempster [Dempster, 1967]. In a finite
discrete space, Dempster-Shafer theory can be
interpreted as a generalization of probability
theory where probabilities are assigned to sets as
opposed to mutually exclusive singletons. In
traditional probability theory, evidence is
associated with only one possible event. In
DST, evidence can be associated with multiple
possible events, e.g., sets of events. DST allows
the direct representation of uncertainty. There
are three important functions in DempsterShafer theory:
• the basic probability assignment function
(bpa or m),
• the Belief function (Bel), and the
• Plausibility function (Pl).
Basic probability assignment does not refer to
probability in the classical sense. The bpa,
represented by m, defines a mapping of the
power set to the interval between 0 and 1.
m:
P(X) 0,1]
(1)
The bpa of the null set is 0 i.e.
m (Æ ) = 0
(2)
Where Æ is the null set
The value of the bpa for a given set A
(represented as m(A), A is a set in the power set
AÎ P(X)), expresses the proportion of all
relevant and available evidence that supports
the claim that a particular element of X (the
universal set) belongs to the set A but to no
particular subset of A.
m (A) = 1
(3)
AÎP (X )
The value of m(A) pertains only to the set A
and makes no additional claims about any
subsets of A. Any further evidence on the
subsets of A would be represented by another
bpa, i.e. B A, m(B) would the bpa for the subset
B. The summation of the bpa’s of all the subsets
of the power set is 1. As such, the bpa cannot be
equated with a classical probability in general.
From the basic probability assignment, the
upper and lower bounds of an interval can be
defined. This interval contains the precise
probability of a set of interest (in the classical
sense) and is bounded by two nonadditive
continuous measures called Belief and
Plausibility. The lower bound Belief for a set A is
defined as the sum of all the basic probability
assignments of the proper subsets (B) of the
set of interest (A) (B - A).
Bel(A) = m(B)
(4)
BÍA
The upper bound, Plausibility , is the sum of all
the basic probability assignments of the
sets (B) that intersect the set of interest
(A)(B Ç A ¹ Æ ).
Pl(A) = m(B)
(5)
BÇA ¹ Æ
The two measures, Belief and Plausibility are
nonadditive. It is possible to obtain the basic
probability assignment from the Belief measure
with the following inverse function:
m(A) =
(-1)
|A-B|
(6)
Bel(B)
BÍA
where|A-B| is the difference of the cardinality
of the two sets.
In addition to deriving these measures from the
basic probability assignment (m), these two
measures can be derived from each other. For
example, Plausibility can be derived from Belief
in the following way:
Pl(A) = 1- Bel (not A) and
Bel (A) = 1 - Pl(not A)
(7)
where not A is the classical complement of A.
This definition of Plausibility in terms of
belief comes from the fact that all basic
assignments must sum to 1. And because of
this, given any one of these measures (m(A),
Bel(A), Pl(A)) it is possible to derive the values
of the other two measures. The precise
probability of an event (in the classical sense)
lies within the lower and upper bounds of Belief
and Plausibility, respectively.
Bel(A)(10)
< P(A) >Pl(A)
The probability is uniquely determined if Bel
(A) = Pl(A). In this case, which corresponds to
classical probability, all the probabilities, P(A)
are uniquely determined for all subsets A of
7
the universal set X. Otherwise, Bel (A) and
Pl(A) may be viewed as lower and upper
bounds on probabilities, respectively, where the
actual probability is contained in the interval
described by the bounds.
Dempster’s rule, we find that m(brain tumor) =
Bel(brain tumor) = 1. Clearly, this rule of
combination yields a result that implies
complete support for a diagnosis that both
physicians considered to be very unlikely.
RULES FOR COMBINING EVIDENCES
Example
Combination rules are the special types of
aggregation methods for data obtained from
multiple sources. These multiple sources
provide different assessments for the same
frame of discernment and Dempster-Shafer
theory is based on the assumption that these
sources are independent.
Dempster’s rule combines multiple belief
functions through their basic probability
assignments (m). The combination (called the
joint m12) is calculated from the aggregation of
two bpa’s m1 and m2 in the following manner:
M12(A)= m1(B) m2(C) /( 1- K )
(11)
Suppose two experts are consulted regarding a
system failure. The failure could be caused by
Component A, Component B or Component
C. The distributions can be represented by the
following:
Expert 1:
m1(A) = 0.99 (failure due to Component A)
m1(B) = 0.01 (failure due to Component B)
Expert 2:
m2(B) = 0.01 (failure due to Component B)
m2(C) = 0.99 (failure due to Component C)
B ÇC = A
when A ¹ Æ
and m12(Æ ) = 0
Expert 1
; when A=
where K = m1(B) m2 (C)
Æ
(12)
A
B
C
Failure
cause
(13)
0.99
0.01
0.0
m1
Æ
K represents basic probability mass associated
with conflict. This is determined by the
summing of the products of the bpa’s of all
sets where the intersection is null. The
denominator in Dempster’s rule, 1-K, is a
normalization factor. This has the effect of
completely ignoring conflict and attributing any
probability mass associated with conflict to the
null set. The problem with conflicting evidence
and Dempster’s rule was originally pointed out
by Lotfi Zadeh in his review of Shafer’s book, A
Mathematical Theory of Evidence.
Zadeh had given a compelling example of
erroneous result found by using Dempster
Shafer theory. Suppose a patient is seen by two
physicians regarding the patient’s neurological
symptoms. The first doctor believes that the
patient has either meningitis with a probability
of 0.99 or a brain tumor, with a probability of
0.01. The second physician believes the patient
actually suffers from a concussion with a
probability of 0.99 but admits the possibility of
a brain tumor with a probability of 0.01. Using
the values to calculate the m(brain tumor) with
8
Failure
E cause m2
X
P
A
Æ
Æ
E
m1(A)m2(A) m1(B)m2(A) m1(C)m2(A)
R
A
0.0 0.99 x 0.0 0.01 x 0.0 0.0 x 0.0
T
= 0.0
= 0.0
= 0.0
2
Æ
B
Æ
m1(A)m2(B) m1(B)m2(B) m1(C)m2(B)
B
0.01 0.99 x 0.01 0.01 x 0.01 0.0 x 0.01
= 0.0
= 0.0099 = 0.0001
C
Æ
Æ
m1(A)m2(C) m1(B)m2(C) m1(C)m2(C)
C
0.9 9 0.99 x 0.99 0.01 x 0.99 0.0 x 0.99
= 0.0
= 0.0099
=0.9801
Table 1 : Dempster Combination of Expert 1 and Expert 2
Ø Steps:
Using Equations 11-13:
1. To calculate the combined basic probability
assignment for a particular cell, simply multiply
the masses from the associated column and
row.
2. Where the intersection is nonempty, the
masses for a particular set from each source are
multiplied, e.g., m12(B) = (0.01)(0.01) = 0.0001.
3. Where the intersection is empty, this
represents conflicting evidence. For the empty
intersection of the two sets A and C associate
with Expert 1 and 2, respectively, there is a
mass associated with it.
m1(A) m2(C)=(0.99)(0.99) =(0.9801).
4. Then sum the masses for all sets and the
conflict.
5. The only nonzero value is for the
combination of B, m12(B) = 0.0001.
6. For K, there are three cells that contribute to
conflict represented by empty intersections.
Using Equation 13, K = (0.99)(0.01) +
(0.99)(0.01) + (0.99)(0.99) = 0.9999
7. Using Equation 11, calculate the joint, m1(B)
m2(B) = (.01)(.01) / [1-0.9999] = 1
Though there is highly conflicting evidence,
the basic probability assignment for the failure
of Component B is 1, which corresponds to a
Bel (B) = 1. This is the result of normalizing
the masses to exclude those associated with
conflict. This points to the inconsistency when
Dempster’s rule is used in the circumstances of
significant relevant conflict that was pointed
out by Zadeh.
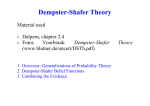
CONTEXT RELAVENCE
CONFLICT
EVIDENCE
Type of evidence
Amount of evidence
Accuracy of evidence
SOURCES
-Type of sources
-Number of sources
-Reliability of sources
-Dependence between sources
-Conflict between sources
COMBINATION
OPERATION
-Type of operation
-Algebraic properties
-Handling of conflict
-Advantages
- Disadvantages
Figure 1: Important Issues in the Combination of Evidence
Much of the research in the combination rules
in Dempster-Shafer theory is devoted to
advancing a more accurate mathematical
representation of conflict. In Figure 1, all of
the contextual considerations like the type,
amount, and accuracy of evidence as well as the
type and reliability of sources and their
interdependencies can be interpreted as
features of conflict assessment. Once values
are established for degree of conflict, the most
important consideration is the relevance of the
existing conflict. Though conflict may be present, it
may not always be contextually relevant.
Advantages and Problems of DempsterShafer Theory of Evidence:
Advantages
Clear, rigorous foundation
Ability to express confidence through intervals
Proper treatment of ignorance
Problems
Non-intuitive deter mination of mass
probability
Very high computational overhead
May produce counterintuitive results due to
normalization
3.4. Possibility Theory
Possibility theory was introduced to allow a
reasoning to be carried out on imprecise or
vague knowledge, making it possible to deal
with uncertainties on this knowledge.
Possibility is normally associated with some
fuzziness, either in the background knowledge
on which possibility is based, or in the set for
which possibility is asserted. This constitutes a
method of formalizing non-probabilistic
uncertainties on events: i.e. a mean of assessing
to what extent the occurrence of an event is
possible and to what extent we are certain of its
occurrence, without knowing the evaluation of
the possibility of its occurrence. For example,
imprecise information such as “Ram’s height is
above 170 cm” implies that any height h above
170 is possible and any height equal to or below
170 is impossible for him. This can be
represented by a “possibility” measure defined
on the height domain whose value is 0 if
h < 170 and 1 if h ³170
(0 = impossible and 1 = possible). When the
predicate is vague like in “Ram is tall”, the
possibility can be accommodate degrees, the
largest the degree, the largest the possibility.
Possibility theory was initialized by Zadeh, as a
complement to probability theory to deal with
9
uncertainty. Since Zadeh, there has been much
research on possibility theory. There are two
approaches to possibility theory: one,
proposed by Zadeh, was to introduce possibility
theory as an extension of fuzzy set theory; the
other, taken by Klir and Folger and others, was to
introduce the possibility theory in the frame
work of Dempster-Shafer’s Theory of
evidence. The first approach is intuitively
plausible and closely related to the original
motivation for introducing possibility theoryrepresenting the meaning of information. The
second approach puts possibility theory on an
axiomatic basis.
1. The intuitive Approach to Possibility (as
proposed by Zadeh in light of Fuzzy set
theory):
Let F be a fuzzy set in a universe of discourse U
which is characterized by its membership
function m F (U) , which is interpreted as the
compatibility of u U with the concept labeled
F. Let X be a variable taking values in U and F
act as a fuzzy restriction, R(X), associated with
X. Then the proposition "X is F ", which
translates into R(X) = F associates a possibility
distribution, p X x , with X which is postulated
to be equal to R(X). The possibility distribution
function, X (u ) ,characterizing the possibility
distribution p X is defined to be numerically
equal to the membership function F (u ) of F,
that is,
p X := m F ; Where the symbol := stands for
"denotes" or "is defined to be".
Example:
Let U be the universe of integers and F be the
fuzzy set of small integers defined by
F = {(1, 1), (2, 1), (3, 0.8), (4, 0.6), (5, 0.4), (6,
0.2)}
Then the proposition "X is a small integer"
associates with X the possibility distribution
p x = F ; in which a term such as (3, 0.8) signifies
that the possibility that x is 3, given that x is a
small integer, is 0.8.
2. The Axiomatic Approach to Possibility:
For consonant body of evidences, the belief
measure becomes necessity measure and
plausibility measure becomes possibility
measure.
Hence Bel ( A Ç B) = min[bel ( A), bel(B)]
10
becomes h ( A Ç B ) = min[h ( A), h (B)]
And
Pl ( A È B) = max[ Pl ( A), Pl(B)]
Becomes p ( A È B) = max[p ( A), p (B)]
And also
( A) 1 ( A ) ; ( A) 1 ( A)
Now if possibility distribution function is
defined as: r : U [0,1]
This mapping is related to possibility measure
as: ( A) max r(X)
X A
Now the basic probability assignment is
defined for consonant body of evidences as:
m=(1 , 2 , 3 ,......., n )
n
mi = 1
Where å
i=
and if possibility distribution function is
defined as: r ( 1 , 2 , 3 , ............., n )
1
n
Where
ri =
n
å m = åm (A )
k
k =i
k
k =i
Example
Let three sets represents different geometrical
shapes of a figure as
A = { circles} ; B = {Octagons} ;
C = {Pentagons}
There are two expert opinions m1 and m2
regarding the shape of figure. The focal
elements are given as follows in table below.
Focal
elements
Null
C
B
BÈC
A
AÈ C
AÈ B
A È BÈ C
A
B
C
m1
m2
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
0
0.2
0.3
0
0
0
0.5
0
0.1
0.1
0
0.1
0
0.3
0.4
For Expert 1 opinion, we have
B Ì (BÈ C)Ì (AÈ B È C)
Thus the probability distribution is given by
r = ( 1, 1, 0.8, 0.5, 0.5, 0.5, 0.5)
But for Expert 2 the evidences are not nested
and hence plausibility measures leads to
conflict.
Comparison Between Possibility Theory and
Probability Theory
1. Probability theory is based on measure of one
type: Probability measure.
Possibility theory is based on the measures of
two types : Possibility and Necessity
measure.
2. Probability theory: Here body of evidences
consists of singletons.
Possibility theory: Body of evidences consists
of a family of nested subsets.
3. Probability theory: Additivity i.e.
P ( A È B) = P( A) + P( B ) - P( A Ç B)
Possibility theory: Max/Min Rules i.e.
Poss ( A È B) = max[ Poss ( A), Poss ( B )]
4. Probability theory: P( A) + P( A) = 1
Possibility theory:
Poss ( A) + Poss ( A) ³ 1 ;
Nec( A) + Nec( A) £ 1
max[ Poss ( A), Poss ( A)] = 1
min[ Nec( A), Nec( A)] = 0
5. Probability theory: P ( A) =
p ( x)
r : X ® [ 0,1] ,
Poss (A) = max(r) A
xÎ A
Difference between Probability Measures
Possibility Measures
and
1. Notion of noninteractivness on possibility
theory is analogous to the notion of
independence in probability theory. If two
random variables x and y are independent, their
joint probability distribution is the product of
their individual distributions. Similarly if two
linguistic variables are non interactive, their
joint probabilities are formed by combining
their individual possibility distribution through
a fuzzy conjunction operator.
2 Even through possibility and probability are
different, they are related in a way. If it’s
impossible for a variable x to take a value xi , it is
also impossible for x to have the value xi , i.e.
p X ( xi ) = 0 Þ PX ( xi ) = 0
In general, possibility can serve as an upper
hand on probability.
Probability Vs Possibility through an Example
x ÎA
Possibility theory: for
Similarity between Probability Measures
Possibility Measures
and
1. Each model based on a measure that maps
the subsets of the frame of discernment W to
the [0,1] interval and is monotype for inclusion.
The main property of Probability measure is
W
P :2 ® [0,1] And
P ( A È B) = P( A) + P ( B) - P( A Ç B)
"A,B Í W
Similarly the possibility measure can be given as
p :2 W® [0,1] and
p ( A È B) = max[p ( A), p ( B)], "A, B Í W
2. Possibility measures degree of ease for a
variable to be taken a value whereas
probability measures the likelihood for a
variable to take a value.
3. Being a measure of occurrence, the
probability distribution of a variable must add
to exactly 1. Whereas there is no such
restriction in possibility distribution since the
variable can have multiple possible values.
4. Possibility measures replace the additivity
axiom of probability with the weaker
subadditivity condition.
Consider the number of eggs X that Hans is
going to order tomorrow morning. Let p ( u)
The degree of ease with which Hans can eat
eggs. Let p(u) is the probability that Hans will
eat u eggs at breakfast tomorrow. Given our
knowledge, assume the value of p ( u) and p(u)
as shown in table below:
u
1
2
p ( u) 1
1
p(u) 0.1 0.8
3
4
5
6
7
8
1
0.1
1
0
0.8
0
0.6
0
0.4
0
0.2
0
We observe that whereas the possibility that
Hans may eat 3 eggs for breakfast is 1, the
probability that he may do might quite small
e.g. 0.1. Thus, a high degree of possibility does
not imply a high degree of probability, nor does
a low degree probability imply a low degree of
possibility. But if an event is impossible, it is
bound to be impossible.
Concluding Remark
The various forms of uncertainties may be
encountered simultaneously and it is necessary
that we be able to integrate them. E.g., in
common –sense reasoning, two or tree forms
of uncertainties are often encountered in the
same statement. Here in integration process of
various methods of dealing with uncertainties,
11
care must be taken to define the domain of
each method.
Understanding of the meaning of statements
and their translation into appropriate models is
delicate. For example, how do we translate
“usually bald men are old”. Which of
P(bald|old) or P(old|bald) is somehow large?
“When x shaves himself, usually x does not
die”, which conditioning is appropriate:
Pl(dead|shaving) or Pl(shaving|dead)? Is it a
problem of plausibility or possibility? These
examples are just illustrative of the kind of
problems that must be addressed.
Every method has some limitations in
comparison to other method and no one give
the full power to tackle all kind of uncertainties
that we face in real life. Almost no work has
been done in the area to integrate all methods.
References
1.George J. Kir and Bo Yuan (2002), “Fuzzy
Sets and Fuzzy Logic”, PHI
Publication.
2. Timothy J. Ross (1995), “Fuzzy Logic with Engineering Applications”, McGraw
Hill International Applications.
3.Philippe Smets (1999), “Verities of ignorance and the need for well-founded
theories”, IRIDIA University, Belgium
4. Philippe Smets (1999), “Theories of Uncertainties”, IRIDIA University, Belgium
5. Eric Raufaste , Rui da Silva Neves and Claudette Marine`, “Testing the
Descriptive validity in human judgments of uncertainty”, Reprint Version to appear
in “Artificial Intelligence”.
6. Helen M. Regan, Mark Colyvan and Mark A. Burgman (1999), A proposal for
fuzzy International Union for the Conservation of Nature (IUCN categories and
criteria“, Biological Coservation, Elsevier Science Ltd.
7. From class notes and exercises of course “Fuzzy Sets, Logics, Systems and
Applications EE658 (2004)” taught by Prof. P K Kalra at IIT Kanpur.
About the author: Ashutosh Dwivedi is pursuing his Ph. D. in the Department of Electrical
Engineering in Indian Institute of Technology Kanpur, India. He obtained Masters of
Technology in Control System from MBM Engineering College, Jodhpur. His major areas of
study include Control System, Neural Networks and Fuzzy Logic.
About the author: Deepak Mishra is pursuing his Ph. D. in the Department of Electrical
Engineering in Indian Institute of Technology Kanpur, India. He obtained Masters of
Technology in Instrumentation from Devi Ahilya University, Indore in 2003. His major field
of study is Neural Networks and Computational Neuroscience. (Home page:
http://home.iitk.ac.in/~dkmishra)
About the author: Professor Prem Kumar Kalra obtained his PhD in Electrical
Engineering from University of Manitiba, Canada. He is currently Professor and Head of
Electrical Engineering Department at IIT Kanpur, India. His research interests are Power
systems, Expert Systems applications, HVDC transmission, Fuzzy logic and Neural
Networks application and KARMAA (Knowledge Acquisition, Retention, Management,
Assimilation & Application).
12