Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Chinese astronomy wikipedia , lookup
Aquarius (constellation) wikipedia , lookup
Perseus (constellation) wikipedia , lookup
Reflecting instrument wikipedia , lookup
Leibniz Institute for Astrophysics Potsdam wikipedia , lookup
Space Interferometry Mission wikipedia , lookup
James Webb Space Telescope wikipedia , lookup
Constellation wikipedia , lookup
Corvus (constellation) wikipedia , lookup
Malmquist bias wikipedia , lookup
Hubble Deep Field wikipedia , lookup
Spitzer Space Telescope wikipedia , lookup
Astronomical spectroscopy wikipedia , lookup
Timeline of astronomy wikipedia , lookup
International Ultraviolet Explorer wikipedia , lookup
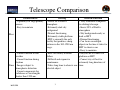
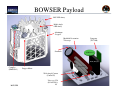
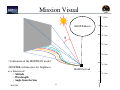
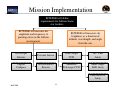
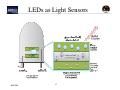
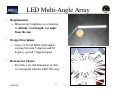
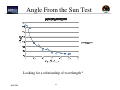
COSGC Space Research Symposium 2009 BOWSER Balloon Observatory for Wavelength and Spectral Emission Readings BOWSER 1 Mission Premise 4.3 km above sea level 402.3km above sea level Information gathered from Dr. Fesen & Dr. Brown Can the telescopic imaging of HST be achieved on a more affordable, balloon-stationed platform? BOWSER 2 Telescope Comparison Ground-Based • Capability for large primary mirrors • Easy to maintain Pros • Cannot function in bad weather • Cannot function during daytime Cons • Images subject to atmospheric distortion • Cannot compensate for turbulence at wavelengths shorter than 1200 nm. BOWSER Orbiting • Above all of Earth’s atmosphere • Extremely dark sky background • Diurnal functioning • Extremely stable platform • HST is currently the only facility that produces sharp pictures in the 300-1200 nm range. Balloon-Stationed • Very affordable compared to orbiting telescope •Above 99% of Earth’s atmosphere • Sky background nearly as dark as HST • Diurnal functioning. • Can focus on multiple objects in the time it takes for HST to observe one • Easy to maintain • May not be as stable of a • HST cost nearly 6 billion platform as HST dollars • Cannot stay at float for • Difficult and expensive extremely long durations of maintenance • Takes long time to observe one time. celestial object 3 Mission Premise Problems a balloon-borne observatory faces: • Optical Disturbances: o Bright Sky Background = Decreased Stellar Magnitude Limit • Difficult to Orient Platform • Mechanical Disturbances: o Pointing Errors • Balloon Movements (Pitch, Roll, Yaw) • High-frequency disturbances (on board motors) BOWSER 4 MODTRAN •Displays sky background as a function of wavelength, altitude, and angle from the sun •Indicates the ideal orientation for daytime observations from the stratosphere •Theoretically, the model predicts an adequate reduction in sky brightness in the stratosphere •Proving the accuracy of brightness at 35-40 km is vital BOWSER 5 StarTracker5000 •Successfully flight tested as the orientation system on three sounding rockets. •Attitude determination, mapping and imaging of stars from sounding rockets, satellites, and balloons •Able to view a field of stars up to 8th magnitude brightness •Triangulates constellations to determine pointing direction. •The ST5000 could be utilized as a part of a pointing system for a balloon-borne observatory. BOWSER 6 Mission Overview • High Altitude Student Platform 2009 (HASP): – BOWSER Proposal won large payload spot January 2009 – Launch September 7, 2009 out of Fort Sumner, New Mexico – Platform ascends on a zero pressure NASA balloon to 36 km and floats for 25 hours experiencing both day and night conditions – Power, communications, and downlink is provided. BOWSER 7 Payload Location BOWSER BOWSER 8 Payload Location Payload 10 Payload 9 BOWSER Payload 12 9 BOWSER Payload 360° LED Array Multi-Angle LED Array Aluminum “Isogrid” Modified Newtonian Telescope Sunshade Computer (TS-7260) AVR Board DVR (DVQ19) Compass (HMC6343) Photometers Stepper Motor Wide Angle Camera (Canon G9) Telescope CCD (PC164CEX-2) BOWSER 10 Mission Visual 36 km HASP Balloon 35.9 km 35.8 km θ 35.7 km 35.6 km • Verification of the MODTRAN model 35.5 km • BOWSER will measure sky brightness as a function of: • Altitude • Wavelength • Angle from the Sun BOWSER HASP Payload 35.4 km 11 Mission Visual HASP Balloon Yaw XYZ Accelerations • Determine performance requirements for a balloon-stationed star tracker • BOWSER will: • Measure the faint limit of detectable stars • Measure pointing errors in the typical balloon environment BOWSER Pitch / Roll 12 Mission Overview • Mission Statement: Mission Science Goal Team BOWSER is working towards the eventual goal of supporting the diffraction-limited performance of balloon-borne telescopes. This mission focuses on the specific problem of compensating for mechanical and optical disturbances: BOWSER will measure the amplitude and frequency of disturbances in the typical balloon environment and characterize the stratospheric sky brightness in order to determine the performance requirements for balloon-borne star trackers. • Mission Objectives: Mission Objectives Level 0 Objective 1: Team BOWSER will measure the amplitude and frequency of pointing errors in the typical balloon environment. Objective 2: Team BOWSER will measure sky brightness diurnally as a function of altitude, wavelength, and angle from the sun. BOWSER 13 Mission Implementation BOWSER will define requirements for balloon-borne star trackers. BOWSER will measure the amplitude and frequency of pointing errors in the balloon environment. BOWSER will measure sky brightness as a function of altitude, wavelength, and angle from the sun. Gyroscopic Sensors Pressure Sensor Wide-Angle CCD 360° LED Array Digital Compass Accelerometer Sensors Modified Telescope CCD Multi-Angle LED Array Photodetector Array BOWSER 14 LEDs as Light Sensors BOWSER 15 LED 360 Array • Requirements: – Measure sky brightness as a function of altitude, wavelength, and angle from the sun • Design Description: – 64 LEDs will measure light in the red, orange, green and blue spectrum • Reasons for Choice: – LEDs do not require the use of filters in order to sense discreet wavelength ranges. – The array will produce over six million altitude, angle, and wavelength-specific data points that can easily verify the MODTRAN model. BOWSER 16 LED Multi-Angle Array • Requirements: – Measure sky brightness as a function of altitude, wavelength, and angle from the sun • Design Description: – Array of 12 red LEDs with angles varying between 5 degrees and 60 degrees, spaced 5 degreed apart • Reasons for Choice: – Provides a second dimension of data to correspond with the LED 360 array BOWSER 17 Angle From the Sun Test Looking for a relationship of wavelength-4 BOWSER 18 Photodetector Array • Requirements: – Correspond sky background brightness to cosmic images to discover the faint limit of stars. • Design Description: – Filter and lens combination will break up the visible spectrum into approximately 50 nm ranges in the IR, red and orange spectrums. – Photodetectors will measure sky background brightness corresponding with the imaging system. • Reasons for Choice: – Filters allow for smaller and more accurate filtering. – Common angle allows for sky background brightness readings to be compared with telescope and wide-angle images of the sky. BOWSER 19 Modified Newtonian Telescope • Requirements: – Characterize sky background brightness and faint limit of detectable stars – Image celestial bodies and constellations consisting of 8th magnitude stars. • Design Description: – Orion Newtonian with a flat secondary mirror, interior baffle, and a correcting lens pair. – Designed to baffle out stray light in order to view fainter stars during daytime. • Reasons for Choice: – Baffle design will allow for daytime identification of at least 8th magnitude stars in order for CCD to perform like the Star Tracker 5000. – Affordable baffling modification constructed under the guidance of professional Russ Melon. BOWSER 20 BOWSER 21 Telescope CCD • Requirements: – Identify constellations consisting of 8th magnitude stars to verify the use of a star tracker on a balloon platform. • Design Description: – Stationed behind the modified Newtonian telescope. – Acts like ST5000 by recording at 10fps. • Reasons for Choice: – Accurately simulates what a star tracker could see from the stratosphere – both at night and during the day. BOWSER 22 Wide-Angle CCD • Requirements: – Identify constellations within its field of view. – Correspond sky brightness readings with images to discover the faint limit of detectable stars. • Design Description: – Installed with a cone baffle to eliminate light at extreme angles of incidence. – High resolution CCD will produce uncompressed RAW images of celestial bodies. • Reasons for Choice: – Adjustable features and customizable settings: •Supports the Canon Hack Development Kit (CHDK), which allows the user to run automated scripts, control various optical settings, and automatically capture pictures on a timed program. •Adjustable exposure time and ISO sensitivity makes this high resolution camera perfect for the low-light settings of the dark sky. BOWSER 23 Disturbance Sensors • Requirements: – Characterize the pointing errors in the balloon environment. • Design Description: • – This three axis gyroscopic device will measure the rotational rates of the platform. Design Description: – Two dual-axis accelerometers will be mounted perpendicularly, allowing for three dimensional acceleration profiling. • Reasons for Choice: – Temperature compensated readings. • Reasons for Choice: – Fast reset time which allows for readings at 2500Hz BOWSER • Requirements: – Characterize the pointing errors in the balloon environment. 24 Digital Compass • Requirements: – Sense orientation relative to N, S, E, W direction and angle from the sun • Design Description: – Determines the pointing direction of the scientific instruments • Reasons for Choice: – Tilt compensated, so the payload’s movement does not affect headings. BOWSER 25 CAD Drawings BOWSER 26 CAD Drawings BOWSER 27 Structural Compliance BOWSER 28 Questions? BOWSER 29 Mario Test Flight Results Voltage data from photometer tubes launch BOWSER burst Voltage data from LED tubes landing 30 launch burst landing Mario Test Flight Results Light intensity data from LED tubes Light intensity data from photometer tubes launch BOWSER burst landing launch 31 burst landing Mission Timeline -2:00:00 0:00:00 ~3:00:00 HASP Internal Batteries On Ascent Observations Float Observations Avionics Components Checkout Pictures 1 per 3 sec Science Components Checkout Video 10 sec every 3 min Pictures change from continuous to clusters every 30 sec All ADS and Light Sensing taking continuous data 10 sec of video every 5 minutes Continuous ADS and Light sensing 1 picture every 3 sec +1:00:00 0:00:00 Launch +3:00:00 +2:00:00 +4:00:00 +5:00:00 KEY: Health and Status packages every 10 minutes on ascent Satellite Communications Activate Computer & AVRs Activate Compass & Accelerometer Still Imaging Video Activate LEDs and photodiodes BOWSER 30 sec clusters every 5 minutes 32 ADS and Light Sensing Mission Timeline 18:00:00 Termination All Instruments Shall Remain Off ~18:48:00 +14:00:00 +15:00:00 +16:00:00 Landing All Instruments Shall Remain Off 17:30:00 Payload Shall Be Recovered By HASP Personnel Prepare for Termination +17:00:00 Close sunshade Suspend operation of all electronics KEY: Satellite Communications Still Imaging Video BOWSER 3333 ADS and Light Sensing