Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Density matrix wikipedia , lookup
Quantum electrodynamics wikipedia , lookup
EPR paradox wikipedia , lookup
Quantum group wikipedia , lookup
Bell's theorem wikipedia , lookup
Interpretations of quantum mechanics wikipedia , lookup
Self-adjoint operator wikipedia , lookup
Compact operator on Hilbert space wikipedia , lookup
Renormalization wikipedia , lookup
Quantum state wikipedia , lookup
Orchestrated objective reduction wikipedia , lookup
Bra–ket notation wikipedia , lookup
Renormalization group wikipedia , lookup
Symmetry in quantum mechanics wikipedia , lookup
Canonical quantization wikipedia , lookup
History of quantum field theory wikipedia , lookup
Scalar field theory wikipedia , lookup
Bachelor Thesis
Knot and Homology Theory in Quantum Physics
performed at the
Institute for Analysis and Scientific Computing
at Vienna University of Technology
supervised by
Ao. Univ. Prof. Mag. rer. nat. Dr. phil. Wolfgang Herfort
by
Stefan Lindner
Matr.-No. 0925022
Vienna, 18.07.2012
Non scholae sed vitae discimus.
Abstract
In this thesis knot and homology theory are presented. Some of its aspects will be discussed more detailed and finally hints to applications in modern quantum physics will be
indicated.
The first part deals with knot theory. Conventions of description will be discussed,
particulary the description as polynomials. As one of the most important results the
Reidemeister’s theorem is proved. The Wilson-loop, whose expectation value is the
Jones-polynomial occurs in quantum field theory and closes the first part.
The second part is about homology theory. Basic concepts such as the homology group
and simplicial complexes will be discussed and lead to the Jordan- Brouwer’s separationtheorem. These results also have their application in quantum theory, for example Khovanov homology.
Kurzfassung
Im Rahmen dieser Arbeit wird die Knoten- und Homologietheorie vorgestellt, einige Aspekte tiefergehend behandelt und Anwendungen in der modernen Quantenphysik angedeutet.
Der erste Teil der Arbeit widmet sich der Knotentheorie. Es werden Darstellungskonventionen diskutiert und insbesondere auf die Darstellung als Polynome eingegangen. Als
eines der wichtigsten Resultate wird der Satz von Reidemeister bewiesen. Der in Anwendungen der Quantenfeldtheorie auftretende Wilson-Operator, dessen Erwartungswert
das Jones-Polynom ist, schließt den ersten Teil.
Der zweite Teil der Arbeit ist der Homologietheorie gewidmet. Grundbegriffe wie die
Homologiegruppe und Simplizialkomplexe werden diskutiert und führen zum JordanBrouwer’schen Separationssatz. Diese Resultate finden ebenfalls Anwendung in der
Quantentheorie, zum Beispiel Khovanov-Homologie.
Abrégée
Dans ce travail, la théorie des nœuds et la théorie de l’homologie sont présentées. Certains
aspects sont discutés de maniere plus détaillée et les applications de la physique quantique
moderne sont démontrés.
La première partie du travail est consacrée á la théorie des nœuds. Les conventions
de la représentation des nœuds sont discutées, en particulier la représentation avec des
polynômes. Puis un des résultats les plus importants, le théorème de Reidemeister,
est prouvé. L’opérateur de Wilson avec les applications dans la théorie quantique des
champs, que le polynôme de Jones est la valeur attendue, est la fin de la première partie.
La deuxième partie est consacrée á la théorie d’homologie. Les concepts de base tels que le
groupe d’homologie et des complexes simpliciaux seront discutés et aboutis au théorème
de Jordan-Brouwer. Ces résultats sont aussi applicables dans la théorie quantique,
par l’exemple dans l’homologie de Khovanov.
Acknowledgement
First of all I would like to thank my supervisor Wolfgang Herfort for his patient
support and for having allowed much liberty in arranging the topics and details of my
bachelor thesis. It was a great experience for me, to think about and discuss all those
interesting notions.
My other professors I would also like to thank - for three years of very interesting bachelor
studies and support.
Furthermore, I thank the librarians of the mathematics and physics library and the main
library of the Vienna university of technology for their kind assistance in finding all the
references.
Also my collegues I would like to thank. It was a very pleasant atmosphere we had, while
doing our bachelor studies and we surely will have during our master studies.
And last but not least I would like to give many thanks to my family and specially to
my girlfriend - You always have been, are right now and will be in the future my most
important and valuable support!
Contents
1 Knot Theory
1.1 Canonic description of knots . . . . . . . . . . . . . . .
1.2 Knot diagrams . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Over- and Underpasses . . . . . . . . . . . . . .
1.2.2 Alexander-Briggs-notation . . . . . . . . .
1.2.3 Description after Dowker . . . . . . . . . . . .
1.3 Reidemeister moves and Reidemeister’s Theorem
1.3.1 Reidemeister moves . . . . . . . . . . . . . .
1.3.2 Reidemeister’s Theorem . . . . . . . . . . . .
1.3.3 Knot invariants . . . . . . . . . . . . . . . . . .
1.4 Knot-polynomials . . . . . . . . . . . . . . . . . . . . .
1.4.1 The L- polynomial . . . . . . . . . . . . . . . .
1.4.2 The Jones polynomial . . . . . . . . . . . . . .
1.5 The fundamental group . . . . . . . . . . . . . . . . . .
1.5.1 Definition . . . . . . . . . . . . . . . . . . . . .
1.5.2 Description of knots . . . . . . . . . . . . . . .
1.5.3 Fundamental group and Jones-polynomial . . .
1.6 Application in Quantum Theory . . . . . . . . . . . . .
1.6.1 Physical Basics . . . . . . . . . . . . . . . . . .
1.6.2 Knot theory applications . . . . . . . . . . . . .
2 Homology Theory
2.1 Homology . . . . . . . . . . . . . . . . . . . . .
2.1.1 Simplicial complexes . . . . . . . . . . .
2.1.2 Homology group . . . . . . . . . . . . .
2.1.3 Jordan - Brouwer separation theorem
2.2 Application in Quantum Theory . . . . . . . . .
2.2.1 Khovanov homology . . . . . . . . . . .
5
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
7
9
9
9
11
12
12
14
15
16
16
17
21
21
21
22
24
24
25
.
.
.
.
.
.
27
27
27
28
29
29
29
Introduction and historical aspects
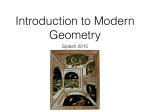
Different forms of knots have been known since long ago. They had technical applications,
like in shipping, or weaving. More interesting and in particular aesthetically pleasing were
the mystic symbols in many cultures. Famous examples are the sign of the pythagorians,
a pentagonal star, the David’s star, or the celtic trefoil knot, shown in the picture below.
Wearing a ring or necklace with a trefoil knot, brings luck and safety over its owner due
to the beliefs of the Celts.
First considerations about mathematical knots were done by Gauss in the 19th century.
He developed strategies to compute the linking number of two knots. This number is a
first information about the grade of complexity of the linking of the considered knots.
But Gauss found no further applications for knots. In the sixties of the same century,
William Thomson, better known as Lord Kelvin, postulated that atoms are knots
in a mysterious substance called ”ether”. In the early 20th century, modern topology developed, topologists like J.W.Alexander or Max Dehn began to consider knots from
a topology point of view. That was the beginning of the success of knot theory. Further
developments led deeper and deeper into topology. One example is homology theory,
which to get discussed later. Practical applications of knot invariants were hardly found
for a long time, because calculations take much time. But when powerful computers were
developed, this problem got under control too. Nowadays there are many interesting applications of knot theory and its further developments, for instance in quantum physics.
A small selection of such applications will be discussed in this thesis.
Figure 1: Celtic trefoil knot necklace for my girlfriend
6
Chapter 1
Knot Theory
Knots will be interpreted as closed curves in R3 . Later we will define polynomials to get
an algebraic expression for a knot.
1.1
Canonic description of knots
We consider knots to be double point free closed polygons in euclidean space Rn :
Definition 1.1 Let γ be a path in Rn with γ : [a, b] → Rn , [a, b] ⊂ R. Let Z = {ξi : i =
0, . . . n(Z)} be a decomposition of γ([a, b]). Further, let be ξ0 = ξn(Z) . Then the sequence
−−−−→
Pi = ξi , ξi+1
0 ≤ i ≤ n(Z) − 1
(1.1)
−−−−→
is called a polygon. Every segment Pi = ξi , ξi+1 is called a strand.
The following figure shows a polygon in this notation, where n(Z) = 7: Graphically
Figure 1.1: Exemplaric knot
every polygon can be seen as a knot. But in order to be able to compare two knots we
7
intruduce certain eqivalence classes. We call polygons, which can be deformed one into
another without passing through a self-intersection, the same knot. For giving a precise
definition, we need the concept of deformation. Therefore we define two operations ∆
and ∆0 :
−−→
Definition 1.2 The operation ∆: Let ξp , ξq , p < q be one strand of the polyhedron (Pi ).
−−−→
−−−→
(Pi ) has the endpoints ξp and ξq . Let ξp ξp+1 and ξp+1 ξq be segments, which are not part
of the polyhedron. If the triangle area ξp ξp+1 ξq has no point in common (Pn ) outside the
−−→ −−→
−−−→ −−−→
route ξp ξq , ξp ξq is substituted with ξp ξp+1 ∪ ξp+1 ξq .
The operation ∆0 : ∆0 is the inverse operation of ∆. If the triangle area ξp ξp+1 ξq has no
−−−→ −−−→
−−−→ −−−→
−−→
point in common with P , except ξp ξp+1 ∪ ξp+1 ξq , then ξp ξp+1 ∪ ξp+1 ξq is substituted by ξp ξq .
Figure 1.2: Applying ∆ and ∆0 to a knot
Now we can give the definition of a knot:
Definition 1.3 A polygon (Pi )k , k ∈ N, which results from another polygon (Pn )0 by
applying a finite sequence of operations ∆ and ∆0 is called isotopic to the polygon (Pn )0 .
All polygons (Pn )i which are isotopic to (Pn )0 constitute an equivalence class of isotopic
polygons. Every such equivalence class [Pi ] is called a knot.
Finally we define a special kind of knots:
Definition 1.4 A knot [Pi ] which is isotopic to a triangle is called circle. Otherwise it
is called knotted.
8
1.2
1.2.1
Knot diagrams
Over- and Underpasses
Before we come to the definition of the three Reidemeister-moves, we need two simple,
but powerful terms. Therefore we have to provide the knot with an orientation, choosing
a starting point ξ0 . It will be indicated by arrows. To be able to discribe the knot in this
way, we need a projection π into a plane. There we get crossing points of the images of
two strands. The projection is chosen in a way, that no double crossings occur:
Definition 1.5 Let [Pi ] be a knot and π be a projection. Further let Pp and Pq be two
strands of the knot. Two points ζk and ζl on this strands in R2 with the property
ζk = π(Pp ) = π(Pq ) = ζl
(1.2)
are called crossing points. A pair of crossing points at the same place that arise from
different strands we call a crossing. The projection π is chosen in a way, that there do
not occur any double-crossings, so
@Pr : π(Pp ) = π(Pq ) = π(Pr )
(1.3)
We now define over- and underpass:
Definition 1.6 Considering two strands of a knot [Pi ], Pp and Pq which cross each other
in a crossing point ζk , k ∈ N, k < ∞, following the knot’s orientation, there are two
possibilities to cross. We define the characteristics as follows:
(
−1 if Pp passes above Pq , which is called overpass
=
(1.4)
+1 if Pp passes below Pq , which is called underpass
Figure 1.3: over- and underpass
1.2.2
Alexander-Briggs-notation
The Alexander-Briggs-notation characterizes a knot by the number of crossings itself,
the crossing number:
9
Definition 1.7 Let π : R3 → R2 be a projection, (Pi ) a representative of a knot and ζ
and η be crossing points of (Pi ). The cardinality of the set
C = {ζ : ∃η : π(ζ) = π(η), ζ 6= η}
(1.5)
is called crossing number of the representative (Pi ). Every knot with crossing number 0
is called unknot.
The minimal crossing number can be shown to be a knot invariant:
Lemma 1.8 Let [Pi ] be a knot, (Pi )k be a representative and π a projection. If the
minimal crossing number of (Pi ) is C, then the minimal crossing number of every other
represantative (Pi )j , j 6= k is C and we can write C = C([Pi ]).
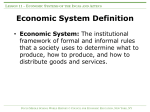
Figure 1.4: Knottable, [wiki]
The more crossings a knot has, the more complex it is and the more representatives
its equivalence class has. Figure 1.4 shows the possible knots for a minimal crossing
number from 0 to 7. The knot with two crossings is equivalent to the unknot; it is not
shown. The knots are given in Alexander-Briggs-notation. This is the simpliest notation for knots: It categorizes them only by their minimal crossing number, as seen in
figure 1.4. The index is given arbitrarily and has no special mathematical meaning. It
only shows, for instance, that there are two different knots with a crossing number of
five. The Alexander-Briggs-notation gives little information about the knot, but it
was the first systematic categorisation of knots.
It is now interesting, how many different knots with given minimal crossing number can
be found. No analytical expression has been found yet to calculate this number for a
crossing number n. Only an upper bound on the number of knots with crossing number
of n that grows exponentially with n is known. For low crossing numbers following data
have been calculated: 1
1
[knot1, section 2.1., page 47]
10
crossing number number of prime knots
3
1
4
1
5
2
6
3
7
7
8
21
9
49
10
165
11
552
12
2176
13
9988
14
46972
15
253293
1.2.3
Description after Dowker
The Dowker-notation is based on how two strands of a crossing behave. 2 First we
will describe this notation for alternating knots and extend later on the notation to nonalternating ones.
Definition 1.9 A knot is called alternating, if the the crossings of a knot in a given
projection π forms an alternating sequence of over- and underpasses.
Otherwise the knot is called non-alternating.
The first step is again to choose an orientation of the knot and a first crossing point. Then
we follow the knot along the chosen orientation and continue numbering the crossing
points until we return to the first one. This process equips every crossing with two
numbers, called its Dowker-pair:
Definition 1.10 Let [Pi ] be a knot, π a projection and C the crossing number of the knot
2C
in this projection. Then there is a sequence (ζk )2C
k=0 of crossing points. Further let (Pq )q=0
be the sequence of the corresponding crossings. A Dowker-pair is a pair of indices of
crossing points:
D = {(a, b) ∈ N2 : ζa = ζb : π −1 (ζa ) ∈ Pp ∧ π −1 (ζb ) ∈ Pq , p 6= q}
(1.6)
D is the set of Dowker-pairs and C := |D| is the crossing number.
Every Dowker-pair has the following property:
Lemma 1.11 Every Dowker-pair (a, b) consists of an even and an odd number.
Proof.
cases:
Let a be even, so a = 2x. For odd a the proof is analogous. There are two
• C even: Then C = 2y, for y ∈ N. So the last crossing we give its first number is
2y − 2x = 2(x − y). This is an even number. So the crossing with number a gets
2(x − y) + 1 as its second number, which is odd.
2
[knot1, section 2.2., page 49]
11
• C odd: Then C = 2y−1. So the last crossing getting its first number is 2y−1−2x =
2(x − y) − 1, an odd number. So crossing number a gets 2(x − y) − 1 + 1 = 2(x − y)
as second number, which is even.
Now we can produce a table of crossing numbers. Writing the odd numbers in ascending
order, using lemma 1.11, yields a sequence of the corresponding even numbers, describing
the knot.
Now we extend the notation to non-alternating knots. It is analogous to the method
for alternating knots, except one additional step: Considering the knot’s orientation, in
every overpass the even number of the Dowker-pair gets a negative sign. Otherwise the
sign is positive. Here is an example:
Figure 1.5: A knot with Dowker-notation (−6, 12, −2, −8, 4, 10), [wiki]
1.3
Reidemeister moves and Reidemeister’s Theorem
We come to the main result of the first chapter. Reidemeister proved that only three
operations, called the Reidemeister-moves Ω1 , Ω2 , Ω3 , are sufficient to get all projections of a knot. The Reidemeister moves are only locally defined operations, so we will
consider single strands of a given knot.
1.3.1
Reidemeister moves
Recall the two basic deformation operations ∆ and ∆0 from section 1.2. These operations
are yet defined for polygons. To define them for differentiable curves, we need three
elementary operations, called Reidemeister-moves.
12
Definition 1.12 Considering a single strand Pp , the first Reidemeister move Ω1 adds
a loop to it. So increases the crossing number by 1. Using the crossing number operator
defined in 1.7 this can be written as
C(Ω1 (π(Pp ))) = C(π(Pp )) + 1
(1.7)
The inverse operator Ω−1
1 reverses the deformation:
C(Ω−1
1 (π(Zi ))) = C(π(Zi )) − 1
(1.8)
Figure 1.6: First Reidemeister-move Ω1 , [wiki]
The second Reidemeister-move Ω2 turns non-overlapping strands into overlapping ones:
Figure 1.7: Second Reidemeister-move Ω2 , [wiki]
Definition 1.13 The second Reidemeister move turns two strands Pp and Pq into an
interlacing with two crossings. The crossing number of the knot representative increases
by 2. Using the crossing number operator defined in 1.7 this can be written as
C(Ω2 (π(Zi ) ∪ π(Zj ))) = C(π(Zi )) + C(π(Zj )) + 2
(1.9)
The inverse operator Ω−1
1 reverses the deformation:
C(Ω−1
2 (π(Zi ) ∪ π(Zj ))) = C(Ω2 (π(Zi ) ∪ π(Zj ))) − 2
13
(1.10)
For two unknotted strands the result of applying Ω2 on this system is shown in figure 1.7.
The last of the three Reidemeister-moves concerns three strands of the knot forming
a triangle. Applying the operator Ω3 , the strand on the very upper side gets moved over
the crossing of the other two strands:
Definition 1.14 Considering three strands Pi , Pj and Pk having exactly 3 crossings are
deformed as follows: Let Pk be the strand at the very up side and Pi the one at the very
down side. Then the caracteristics of the crossing points ζp , p ∈ {i1 , i2 , j1 , j2 , k1 , k2 }
change under Ω3 without restriction of generality by
Ω3 (ζi1 )
1 0 0
0 0 0
ζi1
Ω3 (ζi2 ) 0 1 0
0 0 0
ζi2
Ω3 (ζj1 ) 0 0 −1 0 0 0 ζj1
(1.11)
Ω3 (ζj2 ) = 0 0 0 −1 0 0 · ζj2
Ω3 (ζk1 ) 0 0 0
0 1 0 ζk1
Ω3 (ζk2 )
0 0 0
0 0 1
ζk2
The inverse operator Ω−1
3 reverses the deformation. This amounts to matrix multiplication with the same matrix because the matrix is involutoric.
Figure 1.8: Third Reidemeister-move Ω3 , [wiki]
1.3.2
Reidemeister’s Theorem
The three operations Ωi , i ∈ {1, 2, 3} are sufficient to deform a representative of a knot
[Pi ] into any other. This is the assertion of Reidemeister’s theorem 3 :
Theorem 1.15 (Reidemeister) With the operations Ω1 , Ω2 and Ω3 every change in
a projection π of a knot A[(Pn )] which results from a knot deformation ∆ or ∆0 can be
−1
−1
described. These operations , including their inverse Ω−1
1 , Ω2 and Ω3 are sufficient.
Proof. Without restriction of generality we consider a special polygon (Pn ). In section 1.1 it was shown, that the polygons set up an equivalence class, so the results we
get for one special polygon apply to the whole knot. Furthermore we consider only one
3
[knot2, section 3, page 8]
14
−1
−1
direction, the other is exactly the inverse process, where we use ∆0 and Ω−1
1 , Ω2 , Ω3
instead of ∆ and Ω1 , Ω2 , Ω3 .
−−→
We consider the deformation ∆. Applying ∆ to the knot, a strand ξp ξq gets substituted by
−−−→ −−−→
ξp ξp+1 ∪ ξp+1 ξq . The points π(ξp ), π(ξp+1 ) and π(ξq ) are not collinear. We can assume, that
the projections of the initial polygon and the deformed one, are both regular. So there are
only double points. The triangle π(ξp )π(ξp+1 )π(ξq ) has only finitely many double points
inside and on its edges. Now we can decompose the triangle into straight lines parallel
−−→
−−−→
to ξp ξq and ξp ξp+1 with the following properties: The straight lines confine triangles and
parallelograms such that the projections the corresponding triangles and parallelograms
contain at most one double point. Further, they get crossed by four strands π(Pi ) of the
polygon’s projection if there is a double point inside, or it gets crossed by at most one
strand if there is none.
−−→
−−−→ −−−→
ξp ξq we can convert into ξp ξp+1 ∪ ξp+1 ξq by applying a finite sequence of Reidemeistermoves Ω1 and Ω2 and their inverses. These triangles and parallelograms dissolve step by
step.
The only problem left in a general position are singularities in the projections (we assumed the projections to be regular). But those can be attributed to regular projections:
Let π1 be a singular projection. The Reidemeister-moves are not dependend on the
projection, so we can get the solution by changing to another, regular projection π2 using
the chain:
π1 (hi) = π2 ◦ [F n ] ◦ π2 ◦ π1−1 ◦ π1 (hLi)
where [F n ] is a chain of n Reidemeister-moves and L is our polygon.
1.3.3
Knot invariants
Knot invariants are expressions, which do not change under deformations ∆ and ∆0 or the
Reidemeister-moves. It has to be mentioned at this point, that finding knot invariants
is a central problem in knot theory. A complete set of knot invariants has not been found
yet, it is not even known, if there is a finite number of knot invariants. First we consider
the unknotting number.
Definition 1.16 Let [Pi ] be a knot. Let K0 denote the unknot. The function t : R3 →
R3 : [Pi ] 7→ [Qj ] changes the crossings of the knot [Pi ], so that one overpass gets turned
into an underpass or one underpass gets turned into an overpass. So we get a new knot
[Qi ]. Further let w ∈ N. If there exists a projection π : R3 → R2 , so that
π ◦ tw ([Pi ]) = π(K0 )
(1.12)
then w is called the unknotting number of the knot [Pi ].
The unknotting number indicates, how many crossings have to be changed to get the
unknot.
The second knot invariant to be defined is the overpass number:
Definition 1.17 Let [Pi ] be a knot in R3 , π a projection and b an overpass of the knot.
A maximal overpass b([Pi ]) is an overpass, which cannot be extended to another crossing.
15
The overpassing number O([Pi ]) is defined as
O([Pi ]) = min{b([Pi ])} = sup{b([Pi ])}
b
(1.13)
b
The last knot invariant which we discuss now is the self-intersection number:
Definition 1.18 Let [Pi ] ∈ K be a knot, (πi )i∈N a sequence of projections R3 → R2 and
C : K → N the function, which defines the crossing number. Then the number
C([Pi ]) = min{C(πi ([Pi ]))}
i∈N
(1.14)
is called self-intersection number.
1.4
Knot-polynomials
The ideas of Alexander, Jones and others to describe knots by means of polynomials
was very successful.
1.4.1
The L- polynomial
The L−polynomial has been introduced by K. Reidemeister in need of finding knot
invariants. 4 Consider a knot [Pi ]. Every crossing has an unique Dowker-pair (ζi , ζj ).
Let λ : N → N : i 7→ j be the bijective function described by the Dowker-pairs, so
j = λ(i). Now we define a matrix lij (x) ∈ (K[X])2C×2C , where C is the crossing number
of the considered knot. The rows of this matrix describe the crossings (ζi , ζj ) and the
columns describe the corresponding strands Pi and Pj .
In the row of (ζi , ζj ) with i = 1 and j = λ(i) 6= i or i + 1 we write i + 1. In the column
of Pi we write X, −1 in the one of Pi+1 and 1 − X we write in the column of Pλ(i) . For
= 1 and λ(i) = i we write 1 in the column of Pi and −1 in the one of Pi+1 and for i = 1
and λ(i) = i + 1 we write X in the column of Pi and −X in the one of Pi+1 . Further for
= −1 and λ(i) 6= i or i + 1 we write 1 in the column of Pi , −X in the one of Pi+1 and
X − 1 in the one of Pλ(i) . For = −1 and λ(i) = i we write X in the column of Pi and
−X in the one of Pi+1 and for i = −1 and λ(i) = i + 1 we write 1 in the column of Pi
and −1 in the one of Pi+1 . The other entries are set zero.
Now we define an equivalence class of matrices (lik (x)) as follows:
(lik (x)) ∼ (mik (x)) ⇔ (lik (x)) is similar to (mik (x))
up to adding or removing zero-rows and -columns
This yields L-equivalent matrices. It can be shown, that the L-equivalence class of a matrix (lik (x)) is a knot invariant. All representatives of a knot yield the same determinant.
This is the definition of the L-polynomial:
Definition 1.19 Let π([Pi ]) be a projection of a knot and lik (x) the L-matrix of one of
its representatives. Then the L-polynomial of the [Pi ] is defined as
L(X) = det (lik (x))
16
(1.15)
Figure 1.9: trefoil knot
As an example we calculate the L-polynomial of the trefoil knot. According to figure 1.8,
j = λ(i) = i + 3. We now can determine the matrix lij of the trefoil knot T :
1
−x
0 x−1
0
0
0
x
−1
0
−x + 1
0
0
0
x
−1
0
−x + 1
lij [T ](x) =
(1.16)
x−1
0
0
1
−x
0
0
−x + 1 −1
0
x
−1
−1
0
−x −1
0
x
The L-polynomial of the trefoil knot is the determinant of this matrix:
det lij [T ](x) = −2x6 + 7x5 − 11x4 + 11x3 − 4x2 − x
1.4.2
(1.17)
The Jones polynomial
5
The Jones-polynomial relies on the concept of the bracket polynomial.6 Like the Lpolynomial the bracket- and Jones-polynomial uses interlacings.
First we require that the bracket polynomial of the unknot, which is the unit element in
the space of knots, is the unit element of the polynomial algebra 1:
hi = 1
(1.18)
There are shortcuts for some typical kinds of interlacings as shown below7 .
An interlacing in the considered projection we divide into two new projections of the
interlacing. Each of them has now less crossings than the initial interlacing. This process
is reversible: Putting the two interlacings together yields the initial one; we require that
4
[knot2, section 14, page 37]
[knot1, section6.1, pages 157-162]
6
[knot1, section6.1, pages 157-162]
7
[knot3]
5
17
Figure 1.10: Interlacing types
the polynomials reflect this behavior. This can be achieved by defining this operation as
a linear combination with coefficients a, b. The polynomial of the projections of the new
interlacings has to be eqal to the polynomial of the projection of the initial interlacing:
hAi = ahBi + bhB 0 i
hA0 i = ahB 0 i + bhBi
(1.19)
(1.20)
The difference between these two equations is the direction of the projection. The directions are perpendicular. So we see, that those two projections are equivalent from the
polynomial point of view. There is the same structure. For adding an interlacing with
an unknot we define
hL ∪ i = chLi
(1.21)
because it has to be possible to decompose again the result of this addition. L denotes
the initial interlacing and c is another scalar variable.
In order to make the polynomial independent from the projection π, it has especially to
be an invariant when changing the interlacing. Every change of the projection can be seen
as a multiple interlacing of the knot. To precisize this, we use the Reidemeister-moves
as follows:
hΩ1 (L)i = hLi
hΩ2 (L)i = hLi
hΩ3 (L)i = hLi
(1.22)
(1.23)
(1.24)
We do this in order to turn hLi into a knot invariant. First we consider the operation
Ω2 . This means that we require
hB 00 i = hBi
18
As a consequence we have b = a−1 . So the coefficient of hBi is 1 and we have reduced
the number of variables by 1. Considering condition (1.21) we see that
a2 + c + a−2 = 0
(1.25)
So we can eliminate one more variable by setting c = −a−2 − a2 . Now we can write the
three requirements for the bracket polynomial (1.18), (1.19) and (1.21) using the single
variable a. Therefore we need the following algebraic transformation of interlacing B 00 :
hB 00 i =
=
=
=
ahC0 i + bhDi =
a(ahC1 i + bhC2 i) + b(ahEi + bhC10 i) =
a(ahB 0 i + bchB 0 i) + b(ahBi + bhB 0 i) =
(a2 + abc + b2 )hB 0 i + bahBi = hBi
Now the requirements (1.18), (1.19) and (1.21) become:
(1.18) :
(1.19) :
(1.21) :
hi = 1
hAi = ahBi + a−1 hB 0 i ⇔ hA0 i = ahB 0 i + a−1 hBi
hL ∪ i = (−a−2 − a2 )hLi
(1.26)
(1.27)
(1.28)
The next step is to consider the third Reidemeister-move Ω3 :
Ω3 (F1 ) = F10
That has no influence on the bracket polynomial:
hF1 i = ahF2 i + a−1 hF3 i = ahF20 i + a−1 hF30 i = hF10 i
As last step we consider the first Reidemeister-move Ω1 :
Ω1 (H0 ) = H4
There is a problem with this deformation: It depends on the projection of the intersection:
hH0 i =
=
=
0
hH0 i =
=
=
ahH1 i + a−1 hH2 i =
a(−a−2 − a2 )hH3 i + a−1 hH3 i =
−a3 hH4 i
ahH2 i + a−1 hH1 i =
ahH4 i + a−1 (−a−2 − a2 )hH4 i =
−a−3 hH4 i
So we would get
hH0 i = hH00 i−1
This can be resolved by orienting the knot and using the characteristics of crossing
points. We define a new knot operator, the winding-number:
19
Definition 1.20 Let [Pi ] be a subset of a knot (e.g. an intersection) and π : R3 → R2 a
projection. Considering π([Pi ]), the knot has crossings (ζi , ζλ(i) ). The operator
C(π([Pi ])
ω([Pi ]) :=
X
((ζk , ζλ(k) ))
(1.29)
k=1
is called winding-number.
One can show that ω is invariant if Ω2 and Ω3 is applied to the interlacing.
Definition 1.21 X-polynomial:
X(L) = −a3
−ω(L)
hLi
(1.30)
Ω2 and Ω3 have no influence on ω(L) and hLi, hence only sign can switch. Next we use
the following result, which can be directly seen from the definition of Ω1 and ω:
ω(Ω1 (L)) = ω(L) ± 1
(1.31)
Now we can analyse the influence of Ω1 on X(L):
X(Ω1 (L)) = (−a3 )−ω(Ω1 (L)) hΩ1 (L)i =
= (−a3 )−(ω(L)+1) hΩ1 (L)i =
= (−a3 )−(ω(L)+1) (−a)3 hLi =
= (−a3 )−ω(L) hLi =
= X(L)
As an example we calculate X(T ) for the trefoil knot T . Using
hG2 i = ahG3 i + a−1 hG4 i =
= a(−a1−2 − a−2 ) + a−1 =
= −a−3
and hG1 i = −a3 we get
hT i =
=
=
=
=
ahG0 i + a−1 (−a−3 hG2 i) =
a(ahG1 i + a−1 hG2 i) + a−1 (−a−3 (−a−3 )) =
a(a(−a3 hi) + a−1 (−a−3 hi)) + a−7 =
a(−a4 − a−4 ) + a−7 =
−a−5 − a−3 + a−7
The definition of the Jones-polynomial differs from the X-polynomial only by a variable
transformation:
Definition 1.22 Let L be an intersection and t ∈ R a variable. Then the Jonespolynomial V (L) is defined as
3 −ω(L)
hLi(a(t))
(1.32)
VL (t) := −t− 4
3
With a(t) = t− 4 . The formula symbol ”V ” should remind of ”Vaughan Jones”.
20
1.5
The fundamental group
The fundamental group is another knot invariant. First we define the fundamental group
for an arbitrary topological space and iterprete it then for knots.
1.5.1
Definition
8
Definition 1.23 Let X and Y be topological spaces. A family of functions ht : X → Y
with the parameter t ∈ [0, 1] is called homotopy, if the function
(
X × [0, 1] → Y
H:
(1.33)
(x, t) 7→ ht (x)
is continous with respect to the product topology on X × [0, 1]. Two functions f and g are
called homotopic, if there exists a homotopy ht : X → Y with h0 = f and h1 = g Then
we write f ∼ g. ∼ is an equivalence relation and the equivalence class
[f ] = {g : X → Y : g ∼ f }
(1.34)
is called the homotopy class of f .
Definition 1.24 Let X be a topological space and fix x0 ∈ X. The pair (X, x0 ) is
called space with base-point. Let (Y, y0 ) be another space with base-point. A function
f : (X, x0 ) → (Y, y0 ) or a homotopy ht : (X, x0 ) → (Y, y0 ) is called relative to basepoints.
Considering paths in X we can now define the fundamental group:
Definition 1.25 Let (X, x0 ) be a topological space with base-point. Then the set
π1 (X, x0 ) = {[ω] : ω : [0, 1] → X finite path with base point x0 }
(1.35)
is called fundamental group of X with base-point x0 . It is a group with the multiplication
· : ·([p], [q]) 7→ [p · q]. Its neutral element 1x0 is the homotopy class of the zero-homotopic
paths. The inverse element of [ω] is [ω −1 ], where ω −1 is the path traversed in opposite
direction.
1.5.2
Description of knots
A homotopy class we can depict as a family of pathes which the same endpoints. They
deform into each other without self-intersection, as the following figure shows. This is
similar to the idea of knots: There we considered different polygons which transfer into
each other by the Reidemeister-moves Ω1 , Ω2 and Ω3 . Now we have a set of equivalence
classes of paths. It is a very similar concept with the advantage that we can use the
powerful instruments of algebraic topology for describing these ”new” knots. They are
8
[algtop, section 5.1, page 103]
21
Figure 1.11: Homotopic functions relative to x and y, [wiki]
new in that sense, that we have to consider the complementary space of the knot and not
the knot itself. On these objects homotopic functions can be found, which correspond to
the Reidemeister moves. There is only one disadvantage: In previous considerations
there was no restriction for the knots concerning any special points. Now we have a
special point, the distinguished point x0 . In many applications this is no problem and
the topological advantages weigh out, so the topological view on knots is the second one,
next to the description by polynomials, which is already used in modern studies.
1.5.3
Fundamental group and Jones-polynomial
There is a connection between the fundamental group of a knot and its Jones-polynomial.
The first step is to consider the knot as a closed set of points in R3 . The knots’ complement is infinite and open. In the following figure this is indicated with the trefoil
knot where we replace R3 by a torus with a disk glued along its inner radius. Our geometric interpretation is suitable for any torus-knot. The next step is to intersect the
Figure 1.12: Applying the complement operator to the trefoil knot
torus with a plane as indicated in figure 1.12. This happens in this way, that there are
no ”lost” strands left - every strand has to have an endpoint on the plane. To make
this special kind of intersection more clear, it is shown again from another point of view
in figure 1.12, where b denotes a not more detailed defined function which applies the
described intersection to the knot and c the complement operator. h is a homotopy which
we will discuss in the next step. After embedding the knot and interecting the torus, the
22
Figure 1.13: Cutting, embedding and homotopy
torus gets bended to a cylinder as shown in figure 1.13. Then a homotopy h is applied
which untwists the embedded knot. The knot is actually considered as a ”hole” in the
complementary space. It means that no self-intersection during deformations applies to
the knot. After performing all these transformations to the knot, its fundamental group
can be seen: Choosing a base point d in the complementary space, the fundamental group
arises from n closed loops with common base point d. Here n is the number of strands
– it is two in figure 1.13. Every loop surrounds a single strand: Applying a projection
Figure 1.14: fundamental and free group
π on the cylinder yields a deformation as indicated in the figure. The space obtained
by glueing copies of the cylinder allows shift – with quotient our torus. Thus the infinite cyclic group Z appears as a quotient of the knot group G – with kernel Fn the free
group generated by the n strands in the cylinder. Hence Fn contains G0 , the commutator
subgroup of G, since Z is abelian. Actually it turns out that Fn = G0 . Now G acts
on its commutator subgroup G0 by conjugation and so induces an action of G/G0 upon
G0 /G00 . So with t a generator of G/G0 we find the group ring Z[t, t− ] to act on the finitely
generated Z[t]-module G0 /G00 . Expanding the determinant of t yields the L-polynomial
– the latter transforms into the Jones-polynomial.
23
1.6
Application in Quantum Theory
Knot theory has many applications in quantum theory. The most prominent one is string
theory, which uses higher dimensional knots.
Here we will discuss the Wilson-loop, or Wilson-operator, named after Kenneth
Wilson. At first, a few physical principles will be given.
1.6.1
Physical Basics
Particles as wave functions
9
One of the main basic assumptions of quantum theory is the view of particles as wave
functions. We assume the particle beeing in a location-dependent potential V (x). Mostly
electrons are considered and for them V is the Coulomb-potential. The influence of
the weak force is neglible in general. Now the motion equation of the electron has to
be etablished. Generalizing classical mechanics, developed by Newton, in theoretical
mechanics a certain formalism was developed. It is the Lagrange- and Hamilton- formalism, where the whole information of the particles motion is described by a differential
operator, the Hamiltonian. For the harmonic oscillator it is:
H=−
~2 ∂ 2
2m ∂x2
(1.36)
The location of the particle is described by a wave-function ψ, which satisfies the Schrödingerequation
Eψ = Hψ
(1.37)
Here E is the energy-eigenvalue of the particle.
Observables as operators
Every observable is regarded as an operator. Scalars become replaced by functions in
a function space, e.g. in L2 . This leads to another important instrument of quantum
mechanics:
Results of measurement as expectation value of the corresponding operator
All values that result from measurements correspond with one of the eigenvalues of the
corresponding operator to the observable. The most probable value is the expectation
value of that operator. In classical mechanics, several measurements are performed and
the most propable value is the average of the data, i.e.
n
1X
x=
xk
n k=1
If now the equation is multiplied with n, we get a sum without any scalar factors. Because,
considering physical measurements, we are interested in the absolute value of deviation,
9
[quantum]
24
we substitute xk by its squares x2k . So we get a new expression
X=
n
X
x2k
k=1
which also can be seen as a measure of total deviation. This expression is nothing else
−
than the scalar product of the vector →
x of the measurement data with itself.
We proceed similarly on the function space L2 , using the L2 -scalarproduct
Z
hf |gi =
f · g ∗ dλ(x)
Ω
The expectation value of an observable O as follows:
hOi = hψ|Oψ ∗ i
1.6.2
Knot theory applications
The concepts presented below are quite complex and we can only indicate them.
Wilson-loop
10
. The Wilson-loop is an interlacing, defined as
I
µ
WC = Tr exp i Aµ dx
(1.38)
C
Here Tr denotes the trace of the operator, C is a curve in 4-space and A a vector potential. The Wilson-loop is used for instance in theoretical nuclear physics to describe
quark states by quantum chromo dynamics. Its expectation value turns out to be the
Jones-polynomial of the knot C in R4 .
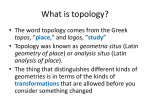
Theoretical solid state physics
In recent years amorph structures (glass) became more and more interesting. Their
description leads to multiply knotted lines with no short-range order. Applying the unknotting results, gives a method for describing degrees of freedom of thermal movements,
the basis estimating entropy and heat capacity.
Quartary structure of proteins
Protein molecules have a very complex wide-range order, the so called quartary structure. The protein strands, consisting of amino acids fold themselfes as a result of the
Coulomb-attraction between the amino and carboxyl groups. Considering the protein
strands as knots with the charge relations as side conditions knot theory could help to
understand better ”protein folding”.
Spin networks and discrete geometry in quantum gravity
11
For unification of relativity theory and quantum physics quantisation of gravity is
10
11
[phys1], [phys2]
[rovelli]
25
Figure 1.15: Structure of a SiO2 -glass, [wiki]
Figure 1.16: Quartary structure of haemoglobine, [wiki]
needed. This has not been developed far enough yet. One promising idea was to look
for a quantisation of the space, a kind of discrete geometry, instead of a direct quantisation of gravity. This is motivated by Einstein’s general relativity theory, where space
and time become geometrical objects. The idea of Rovelli and others was now to find
quantisation conditions. This has been done by constrained systems. Two of them, the
Gauss-constrained and the diffeomorphism constrained are understood quite well. Here
a base of operators set up the spin networks. They describe a kind of discrete geometry, which can be understood as knots. The theory of unknotting has its applications in
considering the last constraint condition, the Hamilton constraint. So the Hamiltonian
of usual quantum systems becomes a constraint condition too in discrete geometries. It
describes an area operator, whose eigenvalues describe the behavoir of the spin networks
in a crossing point. If the area operator is applied to a multiple crossing, its spectrum
changes. This is known as recoupling theory and was developed by C.Rovelli.
26
Chapter 2
Homology Theory
The presented concepts belong to algebraic topology.
2.1
2.1.1
Homology
Simplicial complexes
1
In the last chapter we considered knots as 1-dimensional curves in 3-dimensional space.
The idea of simplicial complexes is to consider higher dimensions. We consider only the
Rn and no more abstract spaces. There we have polyhedrons instead of polygons. First
we need the definition of a polyhedron:
Definition 2.1 Let x0 , . . . , xq ∈ Rn be points. The set
(
)
q
q
X
X
σq = x ∈ Rn : x =
λi xi with
λi = 1, λ0 , . . . , λq > 0 ∈ Rn
i=0
(2.1)
i=0
is called the open q-simplex with corners x0 , . . . , xq . q = dim σq is called the dimension
of the q-simplex. The set
(
)
q
q
X
X
σq = x ∈ Rn : x =
λi xi with
λi = 1, λ0 , . . . , λq ≥ 0 ∈ Rn
(2.2)
i=0
i=0
is called the closed q-simplex with corners x0 , . . . , xq .
When xi = ei , so considering the standard base of Rq+1 , then σq is the q-dimensional
standard simplex in Rq+1 :
Definition 2.2 Let (ei )0≤i≤q be the standard base of Rq+1 . The closed simplex with corners e1 , . . . eq is called the q-dimensional standard-simplex ∆q :
(
)
q+1
q+1
X
X
∆q = x ∈ Rq+1 : x =
λi ei with 0 ≤ λi ≤ 1 and
λi = 1
(2.3)
i=0
1
i=0
[algtop, section 3.1., page 70-72]
27
Before we can define simplicial complexes we need an order relation on the set of simplexes:
Definition 2.3 Let σ and τ be simplexes in Rn . We call τ a face of σ and write τ ≤ σ
if the corners of τ are corners of σ too. If τ ≤ σ and τ 6= σ, τ is an actual face of σ and
we write τ < σ.
Now we can give the definition of simplicial complexes:
Definition 2.4 A simplicial complex K is a set of simplexes in Rn with the following
properties:
1. σ ∈ K and τ < σ ⇒ τ ∈ K
2. σ, τ ∈ K and σ 6= τ ⇒ σ ∩ τ = ∅
The 0-simplexes of K are called corners of K and the 1-simplexes are called edges of K.
The dimension of K is defined as
dim K = max(dim σ) ∈ N ∪ {∞}
(2.4)
σ∈K
Definition 2.5 Let K be a simplicial complex in Rn . The subset
[
|K| =
σ ⊂ Rn
(2.5)
σ∈K
equipped with the weak topology is called the topological space of the simplicial complex
K.
2.1.2
2
Homology group
We can use the concept of simplicial complexes now to define the homology group.
Definition 2.6 (Homology group) Let X be a topological space. A singular q-simplex
is a continous function σq : ∆q → X. The q th singular chaingroup Sq (X) of X is the free
abelian group generated by the q-simplexes in X. Its elements are called singular q-chains
in X. For q < 0 we define Sq (X) = 0. For q ≥ 1 the boundary operator is defined as the
following homomorphism:
∂q : Sq (X) → Sq−1 (X),
σ 7→
q+1
X
(−1)i (σ ◦ δq−1,i )
(2.6)
i=1
For q ≤ 0 we set ∂q = 0. The system S(X) = (Sq (X), ∂q )q∈Z is a chain complex:
∂
∂
∂
∂
∂
∂
∂
∂
S(X) : . . . →
− Sq+1 (X) →
− Sq (X) →
− Sq−1 (X) →
− ... →
− S0 (X) →
− 0→
− 0→
− ...
(2.7)
It is called the singular chain complex of X.The corresponding groups Hq (S(X)) are called
(absolute) singular homology groups of X. We write them as Hq (X) := Hq (S(X)) and
set them 0 for q < 0.
2
[algtop, section 9.1., page 216]
28
The homology group shares some properties with the fundamental group defined in section 1.5.
Theorem 2.7 The function h1 : π1 (X, x0 ) → H1 (X) is a natural homomorphism retarding continuous functions f : (X, x0 ) → (Y, y0 ). If X is a coherent CW-space 3 , h1 is
surjective and the kernel of h1 is the commutator-subgroup K of π1 (X, x0 ).
We only indicate the proof:
Proof.
The first step is to show, that h1 is a homomorphism. This is done by
considering two functions φ, ψ : (S 1 , 1) → (X, x0 ) and checking the properties of a homomorphism. Afterwards we use the fact, that X is a CW-space 4 . So we can consider the
decomposition of X which is given by its cells. They are circle-lines in this case, which
can be deformed. Therefore we use a homotopy fk : S 1 → X 1 . In the last step we can
construct a commutative diagram, which proves the assertion.
2.1.3
Jordan - Brouwer separation theorem
5
The Jordan-Brouwer separation theorem says, that the plane R2 is decomposed by
every single closed curve S ⊂ R2 , or in other words, R2 \ S is not path-related. There is
a generalisation of this theorem for higher dimensions.
Theorem 2.8 Let S ⊂ Rn be an r-sphere, where n ≥ 2 and 0 ≤ r ≤ n − 1. Then
Hq (Rn \ S) = 0 except in the following two cases:
(a)
(b)
For r < n − 1, Hq (Rn \ S) ∼
= Z for q = 0, n − r − 1, n − 1
n
For r = n − 1, H0 (R \ S) ∼
= Z ⊕ Z and Hn−1 (Rn \ S) ∼
= Z.
(2.8)
(2.9)
For n = 2 this is the Jordan’s curve theorem and for n > 2 it is the Brouwer’s
separation theorem.
2.2
2.2.1
Application in Quantum Theory
Khovanov homology
6
Khovanov homology, has certain applications in quantum field theory. It is a powerful
generalistion of the Jones-polynomial defined in section 1.4.2. Further, the Khovanovhomology is a knot invariant and it can be shown, that it is the homology of a chain
complex. Its construction is very similar to the one of the Jones polynomial. It uses a
topological operator, the Khovanov bracket which has three properties, similar to those
of the bracket polynomial. ∅ denotes an empty link, O an unlinked component and D a
3
[algtop, section 9.8., page 245]
[algtop, section 9.8., page 245]
5
[algtop, section 11.7., page 301]
6
[phys1], [wiki]
4
29
crossing of the link L. V is a vector space. Further, F is an operator, which simplifies a
link by forming a single complex out of a double complex.
(a)
(b)
(c)
[∅] = 0
[OD] = V ⊗ [D]
[D] = F (0 → [D0 ] → [D1 ]{1} → 0)
(2.10)
(2.11)
(2.12)
The applications of the Jones polynomial and the Khovanov homology in theoretical
physic reach from solid state physics over quantum field theory to string theory, see
[phys1] or [knot3].
30
List of Figures
1
Celtic trefoil knot necklace for my girlfriend . . . . . . . . . . . . . . . .
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
1.10
1.11
1.12
1.13
1.14
1.15
1.16
Exemplaric knot . . . . . . . . . . . . . . . . . . . . . . . . .
Applying ∆ and ∆0 to a knot . . . . . . . . . . . . . . . . .
over- and underpass . . . . . . . . . . . . . . . . . . . . . . .
Knottable, [wiki] . . . . . . . . . . . . . . . . . . . . . . . .
A knot with Dowker-notation (−6, 12, −2, −8, 4, 10), [wiki]
First Reidemeister-move Ω1 , [wiki] . . . . . . . . . . . . .
Second Reidemeister-move Ω2 , [wiki] . . . . . . . . . . . .
Third Reidemeister-move Ω3 , [wiki] . . . . . . . . . . . . .
trefoil knot . . . . . . . . . . . . . . . . . . . . . . . . . . .
Interlacing types . . . . . . . . . . . . . . . . . . . . . . . .
Homotopic functions relative to x and y, [wiki] . . . . . . . .
Applying the complement operator to the trefoil knot . . . .
Cutting, embedding and homotopy . . . . . . . . . . . . . .
fundamental and free group . . . . . . . . . . . . . . . . . .
Structure of a SiO2 -glass, [wiki] . . . . . . . . . . . . . . . .
Quartary structure of haemoglobine, [wiki] . . . . . . . . . .
31
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6
7
8
9
10
12
13
13
14
17
18
22
22
23
23
26
26
Bibliography
[algtop] R. Stöcker, H. Zieschang: Algebraische Topologie B.G. Teubner, Stuttgart
1994.
[quantum] F. Schwabl:Quantenmechanik Springer, Heidelberg 2007.
[diffgeo] W. Kühnel: Differentialgeometrie Vieweg + Teubner, Stuttgart 2010.
[linalg] H.Havlicek: Lineare Algebra für technische Mathematiker Heldermann Verlag,
Lemgo 2008.
[knot1] C.C. Adams: Das Knotenbuch: Einführung in die mathematische Theorie der
Knoten Spektrum Akad. Verlag, Heidelberg 1995.
[knot2] K. Reidemeister: Knotentheorie Springer, Berlin 1932.
[knot3] W.B. Raymond Lickorish: An Introduction to Knot Theory Springer, New
York 1997
[phys1] E. Witten: Quantum Field Theory and the Jones polynomial Commun. Math.
Phys. 121, 351-399 (1989)
[phys2] D. Bar-Natan: On Khovanov’s categorification of the Jones polynomial Algeb.
Geom. Top. 2, 337-370 (2002)
[phys3] T. Fiedler: On the degree of the Jones Polynomial Topology 30/1, 1-8, 337-370
(1991)
[analysis] M. Kaltenbäck: Analysis 2 für technische Mathematik Skriptum zur Vorlesung an der TU Wien, 2010
[rovelli] C. Rovelli: Quantum Gravity draft, november 30th
[wiki] Wikipedia, the free encyclopedia, Knot theory
32
Statutory declaration
Hereby I assure, that I wrote this present bachelor thesis with the title
Knot and Homology Theory in Quantum Physics
independently and that I used only, without exception, the indicated sources and aids.
Stefan LINDNER
33