Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Ecological interface design wikipedia , lookup
Soar (cognitive architecture) wikipedia , lookup
Multi-armed bandit wikipedia , lookup
Adaptive collaborative control wikipedia , lookup
Reinforcement learning wikipedia , lookup
Embodied language processing wikipedia , lookup
Agent (The Matrix) wikipedia , lookup
Reading assignment
• Chapters 1, 2
• Sections 3.1 and 3.2
What is artificial intelligence
• Act rationally
• Integrate sub-areas in AI into intelligent
agents
– A full breath of potential applications
– Play games
– Control space-rovers
– Cure cancer
– Trade stocks
– Fight wars
AI-complete dream
• Robot that saves the world
– Robot that cleans your room
• But…
– It’s definitely useful, but…
• Really narrow
– Hardware is a real issue
• Will take a while
• What’s an “AI-complete” problem that will be useful to a
huge number of people in the next 5-10 years?
• What’s a problem accessible to a large part of AI
community?
What makes a good AI-complete problem?
• A complete AI-system loop:
–
–
–
–
–
–
Sensing: gathering raw information from the world
Translating: process information
Reasoning: making high-level conclusions from information
Planning: making decisions on what to do
Acting: carry out actions
Feedback (back to sensing)
• But also
–
–
–
–
–
Hugely complex
Can get access to real data
Can scale up and layer up
Can make progress
Very cool and exciting
Factcheck.org
• Take a statement
• Collect information from
multiple sources
• Evaluate quality of
sources
• Connect them
• Make a conclusion AND
provide an analysis
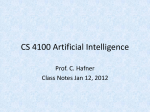
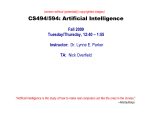
Automated fact checking
Inferenc
e
Query
Fact or
Fiction?
Model
s
Conclusion
and
Justification
Active user feedback
on sources and proof
Agent
• A concept to help us formalize the problemsolving process
• An agent is anything that can be viewed as
perceiving its environment through sensors and
acting upon that environment through actuators
– Human agent: eyes, ears, and other organs for
sensors; hands, legs, mouth, and other body parts for
actuators
An AI agent
• http://www.youtube.com/watch?v=hyGYas
f5rKc
Vacuum-cleaner world
• Percepts: location and contents, e.g., [A,
Dirty]
• Actions: move-left, move-right, suck
Rational agents
• An agent should strive to "do the right thing",
based on what it can perceive and the actions it
can perform. The right action is the one that will
cause the agent to be most successful
• Performance measure: An objective criterion for
success of an agent's behavior
Vacuum-cleaner world
• Percepts: location and contents, e.g., [A, Dirty]
• Actions: move-left, move-right, suck
• Performance measure: award one point for each
clean square at each time step, over a lifetime of
1000 time steps
• What should be rational actions?
Rational agents
• Rational Agent: For each possible percept
sequence, a rational agent should select
an action that is expected to maximize its
performance measure, given the evidence
provided by the percept sequence and
whatever built-in knowledge the agent has.
A simple agent function
Percept Sequence
Action
[a, clean]
right
[a, dirty]
suck
[b,clean]
left
[b,dirty]
suck
[a, clean], [a, clean]
right
[a, clean], [a, dirty]
Suck
…….
……..
• A rational agent given the performance measure, and
the geography is known (why?)
• What if a different performance measure is used?
• e.g. deduct one point each time the vacuum moves
• What if the geography is not known?
An other example
• The savage game
– Performance measure: minimize the total
number of steps
– Environment known
• How to design a rational agent?
PEAS: specifying the setting for
the agent
• PEAS: Performance measure, Environment,
Actuators, Sensors
–
–
–
–
Performance measure
Environment
Actuators
Sensors
PEAS
• Must first specify the setting for intelligent agent
design
• Consider, e.g., the task of designing an
automated taxi driver:
– Performance measure: Safe, fast, legal, comfortable
trip, maximize profits
– Environment: Roads, other traffic, pedestrians,
customers
– Actuators: Steering wheel, accelerator, brake, signal,
horn
– Sensors: Cameras, sonar, speedometer, GPS,
odometer, engine sensors, keyboard
Environment types
• Fully observable (vs. partially observable): An
agent's sensors give it access to the complete
state of the environment at each point in time.
• Deterministic (vs. stochastic): The next state of
the environment is completely determined by the
current state and the action executed by the
agent.
Partially observable
Stochastic environment
Environment types
• Static (vs. dynamic): The environment is
unchanged while an agent is deliberating
• Discrete (vs. continuous): A limited number of
distinct, clearly defined percepts and actions
• Single agent (vs. multiagent): An agent
operating by itself in an environment
State Space Formulation
• Let us start from the simplest form:
– Fully observed, deterministic, static, discrete,
single agent
• A natural way to represent the problem is
called State Space Formulation
– Consider the savage game example
– Key idea: represent the facts by states, and
actions by state transitions
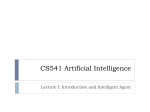
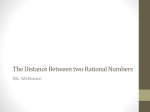
Example: Romania
22
Example: Romania
• On holiday in Romania; currently in Arad.
• Flight leaves tomorrow from Bucharest
• Formulate goal:
– be in Bucharest
• Formulate problem:
– states: various cities
– actions: drive between cities
• Find solution:
– sequence of cities, e.g., Arad, Sibiu, Fagaras,
Bucharest
23
State-space problem formulation
A problem is defined by four items:
1. initial state e.g., "at Arad"
2. actions or successor function S(x) = set of action–state pairs
– e.g., S(Arad) = {<Arad Zerind, Zerind>, … }
3. goal test, can be
– explicit, e.g., x = "at Bucharest"
– implicit, e.g., Checkmate(x)
4. path cost (additive)
– e.g., sum of distances, number of actions executed, etc.
– c(x,a,y) is the step cost, assumed to be ≥ 0
•
•
A solution is a sequence of actions leading from the initial state to a
goal state
What’s the problem formulation for two travelers?
24
Abstraction
• Real world is absurdly complex
state space must be abstracted for problem solving
• (Abstract) state = set of real states
• (Abstract) action = complex combination of real actions
– e.g., "Arad Zerind" represents a complex set of possible
routes, detours, rest stops, etc.
• (Abstract) solution =
– set of real paths that are solutions in the real world
25
Example: vacuum world
• What is the state space
transition graph?
• Single-state, start in #5.
Solution?
26
Vacuum world state space graph
•
•
•
•
states?
actions?
goal test?
path cost?
27
Vacuum world state space graph
•
•
•
•
states? Dirty? and robot location
actions? Left, Right, Suck
goal test? no dirt at all locations
path cost? 1 per action
28
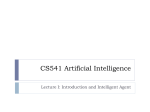
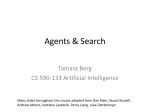
Example: The 8-puzzle
•
•
•
•
states?
actions?
goal test?
path cost?
29
Example: The 8-puzzle
•
•
•
•
states? locations of tiles
actions? move blank left, right, up, down
goal test? = goal state (given)
path cost? 1 per move
30
Multiplication of state-space
• Often the problem involves multiple
entities – a combination of multiple
subproblems
• Cartesian products of search space