Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
N-body problem wikipedia , lookup
Center of mass wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Eigenstate thermalization hypothesis wikipedia , lookup
Internal energy wikipedia , lookup
Heat transfer physics wikipedia , lookup
Analytical mechanics wikipedia , lookup
Lagrangian mechanics wikipedia , lookup
Classical mechanics wikipedia , lookup
Routhian mechanics wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Hunting oscillation wikipedia , lookup
Seismometer wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Centripetal force wikipedia , lookup
Relativistic mechanics wikipedia , lookup
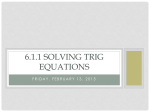
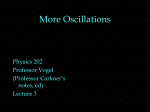
Mechanics 1: The Pendulum We consider the classic “pendulum”, a particle of mass m connected to some point by an inextensible (and massless) connector (“string”) of constant length ℓ, which is free to move in a circle of radius ℓ in a vertical plane. We assume that the only force acting on the mass is gravity, see Fig. 1. O θ l B C m A Figure 1: First, we will derive Newton’s equation for the pendulum. But we need to take a step back and first address some kinematical considerations (i.e., how we will describe the motion). We will consider the the motion to be one dimensional with the mass is constrained to lie on a circle of radius ℓ. Therefore it is natural to describe the location of the mass by an angle, say θ, which we take as the deviation from vertical (i.e., the pendulum hanging straight down). We will derive the equations of motion two ways: 1) by the energy method, and 2) by writing down Newton’s second Law (i.e., “Newton’s equations”). The Energy Method The only forces acting on the pendulum mass (that we are considering) are gravity, and we know (make sure you do know this!) that gravity is a conservative force. Hence, the total energy, kinetic plus potential energy, is conserved. The potential energy is solely due to gravity, and is given by mgh, where h is the height above a reference position. We will take this position (remember, it can be chosen arbitrarily without affecting the equations of motion) to be the position where the pendulum is at its lowest point, i.e. ”hanging straight down”. Using a little bit of trigonometry, the height above this position, as a function of θ, is given by ℓ(1 − cos θ) (see Fig. 1). Therefore the potential energy is given by V = mgℓ(1 − cos θ). Now focus on the kinetic energy. It is certainly one half times the mass times the square of the velocity. But what is the velocity? It’s the time derivative of the position vector. The position vector is given by: r = ℓr1 , and therefore ṙ = ℓṙ1 = ℓθ̇θ 1 . So the total energy is : 1 mṙ · ṙ + V (θ) = E, 2 1 or 1 2 2 mℓ θ̇ + mgℓ(1 − cos θ) = E. 2 Now differentiate this expression with respect to time: mℓ2 θ̈θ̇ + mgℓ sin θθ̇ = 0, or, after cancelling θ̇ and rearranging terms: g θ̈ = − sin θ. ℓ Newton’s Equations Newton’s equations are given by: mr̈ = F. The mass is constrained to lie on a circle. So we are only interested in the acceleration and forces in the tangential direction, i.e., θ 1 . Recall from above that: r = ℓr1 , from which it follows, after differentiating with respect to time, that the component of acceleration in the θ 1 direction is given by: ℓθ̈θ 1 . The gravitational force is given by −mgk. The component of this force in the θ 1 direction is given by: π − θ θ1 = −mg sin θθ1 . (−mgk · θ 1 ) θ1 = −mg cos 2 From these two expressions we obtain: mℓθ̈ = −mg sin θ, or g θ̈ = − sin θ. (1) ℓ Now we want to sketch the phase portrait for the pendulum. However, the presence of the constants g and ℓ present a small problem in that we would wonder if the phase portrait would change significantly if different values of these constants were taken. We can deal with this by eliminatingpthem completely through rescaling time and making the resulting equation dimensionless. First, note that gℓ has the dimensions of 1 time . We can therefore define a dimensionless time, called, τ , as follows: t= s ℓ τ. g Then g d2 d2 = , 2 dt ℓ dτ 2 and, in the dimensionless time τ , (1) becomes: 2 d2 θ = − sin θ. dτ 2 In dimensionless form, we take as the potential energy: (2) V (θ) = 1 − cos θ, since, using this form for V (θ), (2) can be written as: dV d2 θ =− (θ). dτ 2 dθ In Fig. 2 we plot the potential energy and the phase portrait using the graphical procedure as described in the last lecture. V(θ) =1−cosθ θ −π π v θ −π π Figure 2: It is important to be aware that the phase plane is periodic on θ. What does this mean in terms of the motion of the pendulum? There are two equilibrium points: a stable equilibrium at θ = 0, and a saddle at θ = π. There are two separatrices that pass through the saddle point. The separatrices bound a family of closed level sets of the energy function (periodic solutions of Newton’s equations). They have the property that the angle variable never goes beyond ±π. Can you give a physical description of such periodic solutions? The are called librations, or librational motions. The periodic solutions above and below the separatrices are called rotations. Why? 3