Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
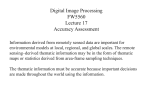
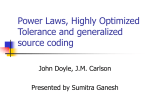
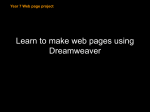
Testing the Sensitivity of a MODIS-Like Daytime Active Fire Detection Model in Alaska Using NOAA/AVHRR Infrared Data C.A. Seielstad, J.P. Ridderlng, S.R. Brown, L.P. Queen, and W.M. Hao Abstract A MODIS-like daytime active fire detection model was tested in Alaskan biomes using NOAA-AVHRR infrared data, and its performance was assessed across a range of channel 3 (3.8 pm) brightness temperature and contextual standard deviation thresholds. Absolute thresholding of channel 3 (T3] and the channel 314 difference (TS4)was more effective than contextual analysis in minimizing false detections, although detection sensitivity to actual fire pixels was lower. The contextual analysis became more effective in terms of fire detections as the T3 and standard deviation thresholds were loosened. However, enhanced fire detection capabilities were achieved at the expense of increased false detections associated primarily with cloud edges. False detections increased exponentially and detections of active fires increased linearly as thresholds were loosened. Furthermore, T3 and standard deviation thresholds suggested for the MODIS global fire detection product appear too high for Alaska. An optimal T3 threshold between 314K and 315K and a standard deviation threshold between 2.5 and 3.5 are proposed. These results suggest that each biome or region may require different thresholds to optimize algorithm performance, recognizing that optimization of the model depends upon user goals. Effective cloud removal is clearly the most significant issue facing this type of fire detection method. Introduction Fire is both a vital disturbance mechanism and a deleterious process that adversely affects ecological, economic, and human resources (Agee, 1993; Cochrane et al., 1999).It is also a significant source of many atmospheric trace gases and aerosols that influence air quality, tropospheric and stratospheric chemistry, and global climate (Crutzen and Andreae, 1990;Penner et al., 1992).Together, these factors promote the need for systematic monitoring of the spatial and temporal distribution of fires using satellite-borneinstruments such as NOAA's Advanced Very High Resolution Radiometer (AVHRR) and NASA'sModerate Resolution Imaging Spectroradiometer(MODIS). The heritage for satellite remote sensing of fire has been documented extensively elsewhere, most recently by Chuvieco (1999)and Kaufman et al. (1998).AVHRR-based detection C.A. Seielstad, J.P. Riddering, and S.R. Brown are with the Remote Sensing Laboratory, University of Montana School of Forestry, Science Complex 430, Missoula, MT 59812 (carlhtsg.umt.edu). L.P. Queen is with the University of Montana School of Forestry, Science Complex 428, Missoula, MT 59812. W.M. Hao is with the Fire Sciences Laboratory, Rocky Mountain Research Station, USDA Forest Senrice, Missoula, MT 59807. methods dominate this heritage primarily because the AVHRR sensors provide a moderate spatial resolution of 1.1km at nadir with twice daily coverage (Justice et al., 1993).The MODIS instrument shares several spatialltemporal resolution characteristics with the AWRR but includes additional spectral characteristics that support detection of sub-pixel high temperature targets. The primary advance is a fire detection channel in the 3.96-pmregion (3.931to 3.987 pm) of the electromagneticspectrum that saturates near 500K, and a high-gain band pass at 11.03 pm (10.78 to 11.28 pm) saturating at about 400K (Running et al., 1994;Kaufman et al., 1998). Although MODIS is the first instrument of its kind designea with fire-specificband passes, its fire detection logic is based on 18 years of fire remote sensing research (Dozier, 1981; Matson and Dozier, 1981;Muirhead and Cracknell, 1984; Matson et al., 1984; Flannigan and Vonder Haar, 1986).The MoDIs fire detection algorithm, like other detection algorithms that utilize thermal infrared data, relies on the fact that high temperature sources elevate detector response at 3.8 pn, and that subpixel hotspots have a greater effect at 3.8 pm than at 11pm (Dozier,1981).In general, detection algorithms take advantage of these attributes by thresholding the 3.8-,um bandpass and/or the differencebetween the 3.8-pm and 11-pm bandpasses. Pixels with brightness temperatures exceeding these thresholds may be considered fires (i.e., Flannigan and Vonder Haar, 1986; Kaufman et al., 1990; Pereira and Setzer, 1993; Arino et al., 1993).A variation on the fixed-threshold theme is contextual analysis, where the brightness temperatures of potential fire pixels are compared to background temperatures (i.e.,Justice and Dowty, 1994; Flasse and Ceccato, 1996; Kaufman et al., 1998; Giglio et al., 1999;Nakayama et al., 1999).New thresholds are then empirically established to determine if a potential fire pixel is significantly hotter than background to merit a positive detection. Despite the apparent differencesbetween methods, each of the AVHRRIMODIS fire detection routines relies on similar logic. They are distinguished from one another primarily by the thresholds used, the number and form of tests, and the order in which the tests are conducted. Variations in these parameters are typically derived empirically in response to algorithm performance issues related to biome, terrain, and season (Giglio et al., 1999;Nakayama et al., 1999; Boles and Verbyla, 1999). Recently, performance differences between regional algorithms have been compared in order to select a single one that Photogrammetric Engineering & Remote Sensing Val. 68, No. 8, August 2002, pp. 831-838. 0099-1112/02/6808-831$3.00/0 O 2002 American Society for Photogrammetry and Remote Sensing can be implemented globally (Kaufman et al. 1998;Giglio et al., 1999).The selected global algorithm must mitigate the effects of biome and seasonal differences over a range of environments in order to produce a consistent fire occurrence dataset. However, a potential consequence of the global approach is that the fire detection algorithm may not be optimized for all geographic regions. For example, Giglio et al. (1999) showed that three proposed global detection algorithms performed most effectively in tropical and temperate biomes and least effectively where surfaces were cool and highly reflective. Although a strong argument can be made for biasing global algorithms toward tropical biomes where the majority of biomass burning takes place (Kaufman et al., 1988),one must consider the potential shortcomings of the algorithm in other biomes, especially if model output showing the spatial and temporal distribution of fires will be used in local or regional applications. In this paper, the performance of a MODIS-like daytime fire detection logic is tested in Alaskan biomes using AVHRR infrared data, and its detection sensitivity is assessed across a range of channel 3 (3.8 pm) and contextual standard deviation thresholds. This approach follows the conclusions of Nakayarna et al. (1999)that it may be more suitable to take a general algorithm and to fine tune it regionally and temporally than to apply a single algorithm to the entire world. The approach also provides a means of assessing the effectiveness of different algorithm thresholds in terms of positive and false detections and demonstrates that the algorithm can be optimized to suit different purposes. Approach Assessment of a MODIS-like active fire detection model using AVHRR data is appropriate because these sensors share many characteristics and they are anticipated to perform similarly as fire detection tools (Cahoon et al., 1999; Giglio, 2001). Although MODIS is designed to demonstrate both better cloud screening and higher saturation temperatures in the thermal channels used for fire detection, it does not appear to gain significant advantage over AVHRRfor detection of small fires because it trades higher noise levels to achieve these temperatures (Cahoon et al., 1999). These authors calculated a theoretical minimum detection limit for the AVHIXRat 435 mZ(0.05 acres) of burning area at lOOOK and postulate that MODIS will share similar sensitivity. In practice, MODIS will mitigate the noise issue at 4 pm by using the low noise, low saturation channel 22 in place of channel 2 1 when saturation has not occurred in the latter channel, thus rendering better overall detection sensitivity for MODIS over AVHRR for fires of all sizes. Giglio et a]. (2001) demonstrate that MODIS should easily outperform AVHRR for larger fires (greater than 316 m2),and will perform at least as well as the AVHRR for smaller fires. The MODIS daytime fire detection algorithm relies on a neighborhood analysis in which the brightness temperatures of potential fire pixels in the 4-pm bandpass are compared to mean background brightness temperatures of adjacent pixels, and the apparent differences in brightness temperatures between the 4-pm and l l - p m bandpasses (AT,,) are compared to median temperature differences (Kaufman et al., 1998).Clouds are first screened from each image, and extremely energetic fire pixels are identified using fixed thresholds in the 4-pm and 11-pmbands. This method of identifying fire pixels will hereafter be referred to as "absolute detection." A moving window is then passed across the scene and a mean and standard deviation are calculated for background temperatures. The window size starts at 3 by 3 pixels and increases incrementally to 2 1 by 2 1 pixels until at least three non-cloud and non-energetic fire pixels are included in the calculations. Each pixel in the 4-pm bandpass is then compared to the median background temperature (plus standard deviations) of its neighborhood to determine if that pixel is a fire pixel, where the brightness temperaAugust 2002 ture of a fire pixel must be larger than background plus a number of standard deviations to merit a positive detection. Similarly, each AT,, pixel is compared to median background temperature differences plus standard deviations. If three cloud-free, non-fire pixels are not identified in a neighborhood, the center pixel is labeled "indeterminant." In this study, performance of a MODIS-like fire detection model was tested using AVHRR infrared data from Alaska. Initially, the algorithm was run using thresholds suggested for MODIS (Kaufman et al., 1998)to provide a baseline for comparisons with alternative thresholds. Then, the sensitivity of the algorithm was tested at various threshold temperatures in the 3.8-pm bandpass and at different contextual standard deviation (8) thresholds during the most active portion of Alaska's 1997 fire season (22 June through 09 July). The model incorporated two general procedures, following Giglio et al. (1999) and Kaufman et al. (1998).First, the data were subjected to an absolute fire detection routine where energetic fire pixels were identified using fixed thresholds in the 3.8-pm bandpass and in the 3.8-pm band - 11-pmband difference (Figure 1). Secondarily, a contextual analysis was utilized, where apparent brightness temperatures were compared to mean background temperatures plus a number of standard deviations. The form of these tests was identical to those employed by Kaufman et al. (1998)with the following exceptions. The brightness temperature differences between the 3.8-pm and 11-pm bands were compared with mean differences plus standard deviations after Giglio et al. (1999) rather than with median differences plus standard deviations in order to provide continuity with existing comparative work that utilized the AVHRR for fire detection purposes. For the same reasons, the absolute threshold for the 3.8-pm - 11-pm difference was fixed at the frequently cited midpoint of its range, 10K, rather than 20K. Finally, Kaufman et al.'s (1998) daytime absolute threshold of 360K at the 4-pm bandpass (which overrides the T4, difference test) was not utilized because this band saturates at about 320K on the A m . Instead, the primary MODIS 4-pm threshold of 320K was utilized. The effect of the primary threshold on model sensitivity was evaluated by systematically reducing it from 320K to 310K. As this threshold declined, more potential fire pixels were removed from the neighborhood analysis, generally decreasing mean background temperatures and increasing the likelihood that a fire pixel would be warmer than background. After selecting an "optimal" threshold in the 3.8-pm band (based on a ratio of positive to false detections), the standard deviation threshold in the neighborhood analysis was systematically decreased from four to two. In effect, the requirement that a fire pixel be warmer than background was made less stringent, increasing the likelihood that a fire pixel would be detected. The rationale for selection of the modified thresholds was as follows. First, there are 429 possible combinations of Channel 3 (T,), Channel 3 - Channel 4 (T,,), and Sthresholds using the published range of integers for each (T,: 308 to 320K, T,,: 5 to 15K, S: 2 to 4). It was unrealistic to test each of these combinations. Empirical evidence based on preliminary analysis of the Alaska fire data suggested that algorithm performance in this region was most sensitive to variations in T3and 8, and that the MODIS thresholds for these tests might be too high. Several authors report similar findings (Giglio et al., 1999;Boles and Verbyla, 1999;Nakayama et al., 1999).Therefore, the T,, threshold was fixed at the most frequently cited value of 10K, Swas set at the mid-point of its range (3), and T, was varied across its published range of thresholds. Summary statistics were generated for these tests, and the optimal T, threshold was selected (314.5K)for the Sthreshold sensitivity analysis. Here, it is recognized that "optimal" is subjective and depends upon one's PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING I I Figure 1. Conceptual layout of a MoDlslike global daytime fire detection processing stream. The sensitivity analysis box (center right) indicates where the model was modified to assess optimization for Alaska biomes. goals. For the purposes of this work, optimal is subjectively defined as the point at which the most positive detections are gained at the least cost in terms of false detections. A significant consideration for all detection algorithms is a cloud-masking methodology. Clouds are generally masked from AVHRR data by thresholding some combination of T,, T5, T,,, channel 1, and channel 2 reflectance, and a ratio (Q of channel 2 and channel 1(Saunders and Kriebel, 1988;Arino et al., 1993; Flasse and Ceccato, 1996; Thornton, 1998).For this study, empirically derived thresholds were chosen that were less restrictive than published values in order to avoid mistakenly removing fire pixels from the analysis (Figure 1).Most significantly, channel 1and channel 2 reflectance thresholds were set at 0.40 and 0.30, respectively. Preliminary analyses of the Alaska data indicated that a published channel 1threshold of 0.25 (Arino et al., 1993)and a channel 2 threshold of 0.20 (Flasse and Ceccato, 1996)removed 10 to 1 5 percent of fire pixels that were detected using lower thresholds. Giglio et al. (1999)also note that these thresholds are too restrictive, particularly for pixels containing both smoke and active fire. Because a primary goal of this study was to examine the sensitivity and limits of the MODIS algorithm using all possible fires, looser thresholds were utilized, recognizing that the less restrictive cloud mask would result in increased false detections (and increased positive detections). PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING Finally, although Giglio et al. (1999) have demonstrated that biome, atmospheric conditions, scan angle, and season can affect the probability of detecting certain fires, biomes were not stratified, atmospheric corrections were not performed, adjacent fire pixels were not consolidated, and scan-angles were not restricted. At present, there is neither a clear rationale nor supporting data to easily perform these functions. In terms of scan angle, Boles and Verbyla (1999) have shown that detection accuracy is actually higher at extreme scan angles in Alaska, and recommend not restricting analysis to near-nadir pixels. Also, a glint-exclusion routine was not performed in this study in order to avoid mistakenly eliminating fire pixels. Empirical evidence from Alaska suggests that glint is only an issue in Alaska Range snow and ice features where fires typically do not occur. It is worth noting, however, that some of the false alarms documented below could be attributable to solar contamination in the AVHRR'S 3.8-pm bandpass. Data Processing and Analysis Daily data from NOAA-14 AVHRR in level 1B format were obtained from the Alaska Geophysical Institute in Fairbanks for the 1997 fire season (01May through 10 August). Thermal data were converted to radiance using onboard calibration coefficients as described in the NOAA Polar Orbiter Data Users Guide (Kidwell, 1998) and were subsequently transformed to AL,gusr 2002 833 brightness temperatures through inversion of Planck functions. Reflectance in the visible and near-infrared channels was calculated following Rao and Chen (1999),using updated coefficients. The MODIS active fire detection algorithms (and variants) were run on a subset of these data from 22 June to 09 July,representing the most active portion of the fire season. Detection images were then registered to a Defense Mapping Agency 1:1,000,000-scalebase map projected to the Albers conical equal area projection (DMA, 1992).The root-mean-squareerror for each scene was less than one pixel. After an ocean mask was applied, the fire detection images were compared to an Alaska Fire Service (AFS) fire occurrence database. The ~Fs'firebccurrence database, derived from daily fire reports, was converted to a geographic information system (GIS)point coverage. Coverage attributes used in this analysis include fire location, date, time and size at three reporting times- discovery, containment, and extinguished. It is important to note that fire sizes were estimated by AFS and that fires were not always discovered on the date that they started. Consequently, some fires were detected by the AVHRR prior to being identified by AFS. Also, the AFS is conservative in declaring fires out, so a period is expected near the end of each fire when that fire is still declared active, but is essentially not detectable by the A m (Boles and Verbyla, 1999).Unlike the previously cited study, the last burning days of fires were not buffered, so the detection accuracies presented here are somewhat conservative. On a given day, all fires declared still active by the AFS were included in the analysis, regardless of size. Following Boles and Verbyla (1999),detected fire pixels had to be within three pixels of an AFS fire location to account for positional inaccuracies in both the AFS database and the A= imagery. For large fires that had spread significant distances from reported points of origin, the arrangement of pixels, the presence of smoke, and the proximity to fire pixels from the previous day, were used to determine if candidate pixels belonged to a particular fire. Results and Discussion Cloud Effects Clouds significantly affect performance of all infrared fire detection algorithms. In this study, 24 to 75 percent of fires (by day), with an average of 53 percent, were not detected due to clouds (Figure 2). These results are comparable to those of Flannigan and Vonder Haar (1986) in central Alberta (12 June z1J*r;,~""z~ur\-fr'*~~J*~*~~O~^ru\di~O~~05-'d&o1~de-\J& DATE Figure 2. Daily percentage of active fires obscured by clouds for the period 22 June through 09 July, 1997. 834 August 2002 through 21 July, 1982)where 59 percent of fires were hidden by clouds. Cloud edges and sub-pixel clouds were the primary source of false detections. An estimated 98 percent of false detections occurred along cloud edges, particularly those over water bodies. Most of the non-cloud false detections were persistent throughout the period of study, suggesting that they could be removed using a regional mask. The remainder of the land-based false detections occurred along snow and ice features in the Alaska Range where fires are relatively infrequent. A glint exclusion routine that utilizes solar zenith angles or a snow-ice mask may be effectivefor removing these false pixels. Contrary to the results of Giglio et al. (1999),the contextual algorithm generated more false alarms along cloud edges than did the fixed-threshold algorithm. However, a channel-4 background test (T, r The,) (Justice et al., 1996)and a restrictive channel-2 reflectance test (R22 0.20) (Flasse and Ceccato, 1996)were not employed in order to avoid missing fire detections. Giglio et al. (1999) ascribed false alarm differences between fixed-threshold and contextual algorithms to these tests. The results presented here suggest that the use of a non-restrictive cloud mask with the contextual algorithm increases the occurrence of false alarms along cloud edges. This problem might be mitigated by MODIS through use of the enhanced cloud screening algorithms that utilize band passes independent ofthose used for fire detection (Ackermanet al., 1998).Furthermore, it is difficult to assess the number of false alarms associated with solar contamination, leaving in question how spectral response differences between the MODIS and AVHRR mid-infrared fire bands might affect this potential problem. Fire Detection with MODlSLlke Thresholds (T3 2 320 K, TW 2 10 K) One-hundred fifteen fires were detected using the absolute threshold algorithm and 128 were detected using the contextual algorithm (out of 560 cloud-free fires), representing 21 percent and 23 percent of fires, respectively, that could have been detected. The absolute algorithm resulted in 1021 fire pixels and 42 false pixels (4 percent false detects) for the period of study. During the contextual detection the same 1021fire pixels plus an additional 95 were identified, and 1774 false pixels were detected (61 percent false detects). In terms of actual fires, 115 were detected by the absolute method and 128 by the relative method (out of 560 cloud-free fires). When compared to the absolute detection, the relative detection added 9.3 percent more fire pixels, 42 times more false pixels, and 11percent more fires. Eight of the 13 fires identified contextually that were missed by the absolute method were single-pixel detections and the remaining five were two-pixel detections. It is worth noting here that actual fires are individual fire events as recognized by the Alaska Fire Service and are distinct from fire pixels. In the scheme presented, if any fire pixel is associated with a named fire, that fire is detected. Although many fire pixels may be associated with an individual fire, only one fire detection is allowed per fire for each satellite overpass, hence the distinction between fires and fire pixels. These results highlight two important considerations. First, the absolute detection, while missing some fire pixels and fires, confers great benefit in terms of user's accuracy. For example, 91 percent of detectable fire pixels were identified by the absolute method but 96 percent of these detections were positive fire detects. By comparison, 9 percent more fire pixels were identified by the contextual method, but only 39 percent of the total detects were positive. Second, the contextual algorithm is very susceptible to false detections, particularly along cloud edges, where relatively cool sub-pixel clouds reduce background temperatures. Although both methods fail to completely characterize fire activity, the absolute method provides a more appropriate measure of actual fire activity than does the relative method if one's goal is to estimate area burning at time PHOTOGRAMMmlCENGINEERING& REMOTE SENSING 14WO 12m 1mo J 0 4 ma 6000 a 4000 2 m 0 308 310 312 314 316 318 320 322 CHANNEL 3 BRIGHTNESS TEMPERATURETHRESHOLD (K) Figure 3. Performance of the contextual and absolute algorithms in terms of detected fire pixels and false pixels for a range of AVHRR channel 3 brightness temperature thresholds. of satellite overpass (1063of 1116 fire pixels versus 2890 of Ill6 fire pixels). Flre Detection wlth ModHled Thresholds T, Thresholds lower because more warm pixels are excluded from the neighborhood analysis. Therefore, the temperature of a potential fire pixel is more likely to be elevated enough above background temperature to merit a positive detection. At cloud edges where sub-pixel clouds depress brightness temperatures, the same principle applies, hence the contextual algorithm's propensity for false detections in this environment. Most of the additional fire pixels detected at lower thresholds belong to fires already detected at higher thresholds, meaning that the primary effect of loose T3thresholds is more complete characterization of these fires (Figure 5). Of the fires that were detected at one threshold but not at another, all were one- and two-pixel detections. At T3 = 310K,three fires 900m2 (0.10acres) in size were detected, representing 1 percent of fires in this size class that could have been detected. At T3 = 313K, none of these fires were detected. Although lower T3thresholds clearly result in detecting more fires (distinct from fire pixels), the number of pixels associated with these fires is small. For example, 45 more fires were detected at 310K than at 320K,represented by 83 pixels. In turn, these 83 pixels represent 4.4percent (8311862)of the fire pixels that were detected at 310K but not at 320K. An optimal T3threshold is difficult to identify because that threshold depends on the goals of the detection algorithm user. In Alaska, where fire locations are generally known, a low threshold is appropriate because false detections can be effectively masked, Regions with less well-developed intelligence systems probably will require higher T3 thresholds to minimize false detections. For Alaska, a balance between detecting positive fire pixels and false pixels can be achieved at or near T3 = 314.5K.For example, by reducing the T3threshold As the Tgthreshold was reduced from 320K to 310K,the number of detected fire pixels increased 2.3 times from 1,433to 3,295.However, the number of false pixels increased about 3 times from 4,254to 13,062(Figure 3). A roughly exponential increase in false pixels is observed, in comparison to a linear increase in detected fire pixels as the T3threshold is loosened. The number of individual fires detected increased 30 percent, from 148 to 193,over the same range of thresholds, representing 26 and 34 percent of fires, respectively, that could have been detected (Figure 4). Intuitively, when the T, threshold is reduced, calculated background temperatures are generally 2W - 180 - 0 la- c B Y g Y lXn '40- (::: MODIS [Cmbxld) I@ lZO 1W - 1 n uools IWhw -I -A- CONTEXTUAL ALGORITHM -& ABSOLUTE ALGORITHM , 308 310 312 314 316 318 320 322 CHANNEL 3 THRESHOLD (K) Figure 4. Performance of absolute and contextual algorithms in terms of detected fires. The number of fires d e tected using proposed MODIS thresholds shown for comparison (boxes). PHOTOGRAMM€rRICENGINEERING & REMOTE SENSING Figure 5. Comparison of detection images for two fires in southwestern Alaska (26 June 1997)at three AVHRR Channel 3 brightness temperature thresholds. Characterizations of these fires using proposed MODIS thresholds are shown in the upper two frames. The Mud Fire (on left) is relatively inactive with no visible smoke plume. The Simels Fire (on right) is burning actively with a welldeveloped smoke plume. August 2002 835 from 320K to 316K, we experience a 47 percent increase in fire detections for a 16 percent increase in false detections. When the T, threshold is reduced to 314.5K, an additional 15 percent fire pixels and 1 4 percent false pixels are gained. If the threshold is further reduced to 313K, 16 percent more fire pixels and 24 percent more false pixels are generated. Finally, at 310K, 51 percent additional fire pixels and 153 percent more false pixels are detected. Standard Deviation Thresholds Systematicallyreducing the standard deviation (6) threshold from four to two resulted in improved detection sensitivity, but this improvement was marginal when compared with the associated increase in false detections (Figure6). At 6 = 2,2602 fire pixels and 38,389 false pixels are detected; at 6 = 3,2324 fire pixels and 5517 false pixels are identified; at 6 = 4 , there are 2235 fire pixels and 3060 false pixels. In terms of individual fires, 200, 171, and 163 fires, respectively were detected at thresholds of two, three, and four standard deviations (representing 36 percent, 31 percent, and 29 percent of fires that could have been detected). Each of the fires detected at one threshold but not at another are one- and two-pixel events. Consequently,they do not contribute significantly to the total number of fire pixels on any given day. As was witnessed with the T, threshold, the number of fire detections increases linearly as standard deviation thresholds are loosened, while the number of false detections increases exponentially. An appropriate 6threshold lies between 2.5 and 3.5 for achieving minimum false detections and maximum positive detects. Evaluation of finer Ssteps between two and three will be necessary to determine exactly where in this range that the rate of false detections increases most rapidly. Conclusions The results presented here demonstrate the sensitivity of ~ ~ D ~ s - lfire i k edetection logic to variations in T, thresholds and T,, standard deviation thresholds. In Alaska, the neighborhood analysis is a more effective method in terms of actual fire detections as the T, and Sthresholds are loosened. However, enhanced fire detection capabilities are achieved at the cost of increased false detections that are associated primarily with cloud edges. An exponential increase in false detections of fire pixels and a slight linear increase in positive detections are observed as thresholds are loosened. 220 38,389 (Absolute Algorithm) (Contextual Algonthm) MODIS MODIS (Absolute (Contextual Algonthm) Algorithm) S=4 6=3 6-2 Figure 6. Performance of the contextual algorithm in terms of standard deviation (6) thresholds. Results using proposed MoDls thresholds shown for comparison. Upper inset depicts detected fires and lower inset shows detected fire pixels and false pixels. 836 A u g u s t 2002 PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING The T, and 6 thresholds suggested by the MODIS fire products team (Kaufman et al., 1998) are too high for Alaskan biomes when using AVHRR data. A T, threshold between 314K and 315K and a Sthreshold of 2.5 to 3.5 are proposed here. Additionally, an absolute detection algorithm may be more appropriate than a neighborhood analysis to minimize false detects. However, optimization of the MODIS active fire detection algorithm will depend almost entirely upon the goals ofthe user. For regions like Alaska where the locations of fires are generally known, the detection routine could be "seeded" with fire locations, and unrestrictive 3 ' 8 - ~ m band and Sthresholds could be utilized. Useful estimates of fire activity, growth, size, and direction-of-movement would then be In regions that do have effective fire monitoring strategies in place (tropical and subtropical South America, Africa, and Asia), tighter thresholds will be required to minimize false detections. Consequently, a large underestimation of actual fire activity is anticipated for these areas. In the context of the findings of Giglio et al. (1999)and Nakayama et al. (1999),the results presented here strongly support the conclusion that each biome or region may require its own thresholds to optimize model performance in terms of fire detections, Although a single global fire detection algorithm is clearly desirable, it will not function ideally in all biomes and seasons. Consequently, some users of the MODIS active fire detection product will wish to customize the algorithm to suit their own purposes, finding argues for regional distribution of data, custom algorithms, and initial technical support, in addition to the proposed dissemination of singular global fire products. One of the most critical areas for future research lies in development of more effective 'loud screeningprocedures' The real issue in improving fire detection is not how to detect more fires, but how not to detect more false pixels. At present, the most used 'loud masks large numbers of fire pixels from consideration. Although the MODIS cloud products may mitigate some of the cloud contamination problems for MODIS fire detection, at present the choice of cloud mask thresholds is an additional consideration for users of active fire detection products, particularly for users of AVHRRdata. A buffer on cloud edges may remove many of the false detections and allow fairly loose detection thresholds to be employed. This potential remedy should be explored further. Finally, it has not been demonstrated that the current MODIS fire detection model is applicable for different vegetation types and seasons, but it represents a major step toward the systematic assessment of the extent of global biomass burning. Upcoming validation efforts are sure to highlight its strengths, identify its weaknesses, and lead to additional improvements and new avenues of research. Already, Giglio et al. (1999) have suggested that utilizing a donut-shaped window, increasing the required number of retained pixels from three to six, and using the mean absolute deviation rather than the standard deviation may increase model sensitivity to small fires without sacrificing occurrence of false detections. Given the suggestion that regional users may wish or, indeed, need to modify healgorithm, these suggestions represent additional variables that should be factored into regional adaptations of the model. Acknowledgments The authors would like to acknowledge the support of this research by NASA and the USDA Forest Service Intermountain Fire Sciences Laboratory under agreement #RMRS-98553-RwA. In addition, the efforts of Dr. Yoram Kaufman at Goddard Space Flight Center, Don Barry and Mary Lynch at the Alaska Fire Service, and the anonymous reviewers are appreciated. PHOTOGRAMMETRIC ENGINEERING & REMOTE SENSING References Ackerman, S.A., K.I. Strabala, and L.E. Gumley, 1998. Discriminating clear sky from clouds with MODIS, Journal of Geophysical Research, 103(D24):32141-32160. Agee, J.K., 1993. Fire Ecology of Pacific North west Forests, Island Press, Washington, D.C., 493 p. h i n o , O., J.-M. Melinotte, and G. Calabresi, 1993. Fire, Cloud, Land, Water: the 'lonia' AVHRR CD-Browser of ESRIN. EOQ 41 (July, 1993), ESA, ESTEC, Noordwijk, The Netherlands (available on CD-ROM). Boles, S.H,, and D.L, Verbyla, 1999. Effect of scan angle on AVHRR fire detection accuracy in interior Alaska, International Journal of Remote Sensing, 20(17): 3437-3443. Cahoon, D.R.J., B.J. Stocks, M.E. Alexander, B.A. Baum, and J.G. Goldammer, 1999. Wildland fire detection from space: Theory and application, Biomass Burning and It's Interrelationships with the Climate System, Advances in Global Change Research, Vol. 3 (J.L. Innes, M. Beniston, and M.M. Verstraete, editors), Kluwer Academic Publishers, Dordrecht, The Netherlands, pp. 98-106. Chuvieco, E., 1999. Remote sensing of forest fires, Observing Land from Space: Science, Customers and Technology, Advances in Global Change Research, Vol. 4 (M.M. Verstraete, M. Menenti, and J. Peltoniemi, editors), Kluwer Academic Publishers, Dordrecht, The Netherlands, pp. 27-40. Cochane, M.A., A. Alencar, and E.A. Davidson. 1999. Positive feedbacks in the fire dynamic of closed canopy tropical forests, Science, 284(5421):1832-835. Crutzen, P.J., and M.O. Andreae, 1990. Biomass burning in the tropics: impact on atmospheric chemistry and biogeochemical cycles, Science, 250 (4988):1669-1677. DMA, 1992. Digital Chart of the World, North American Edition 1, U.S. Defense Mapping Agency, Washington, D.C. (available at www.nima.mi1). Dozier, J., 1981. A method for satellite identification of surface temperature fields of subpixel resolution, Remote Sensing of Environment, 11(3):221-229. Flannigan, M.D., and T.H. Vonder Haar, 1986. Forest fire monitoring using NOAA satellite AVHRR, Canadian Journal of Forest Research, 16(3]:975-982. Flasse, S.P., and P. Ceccato, 1996. A contextual algorithm for AVHRR fire detection, International Journalof Remote Sensing, 17(2): 419-424. Giglio, L., and J.D. Kendall, 2001. Application of the Dozier retrieval to wildfire characterization: A sensitivity analysis, Remote Sensing of Environment, 77(1):34-49. Giglio, L., J.D. Kendall, and C.O. Justice, 1999. Evaluation of global fire detection algorithms using simulated AVHRR infrared data, International Journal of Remote Sensing, 20(10):1947-1985. Justice, C.O., and P. Dowty, 1994. IGBP-DIS Satellite Fire Detection Algorithm Workshop Technical Report (February, 1993), IGBPDIS Working Paper 9, NASA-GSFC, Greenbelt, Maryland, 16 p. Justice, C.O., J.P. Malingreau, and A.W. Setzer, 1993. Satellite remote sensing of fires: Potential and limitations, Fire in the Environment (P.J. Crutzen and J.G. Goldammer, editors), John Wiley and Sons, pp. 77-88. Justice, C.O., J.D. Kendall, P.R. Dowty, and R.J. Scholes, 1996. Satellite remote sensing of fires during the SAFARI campaign using NOAAAVHRR data, Journal of Geophysical Research. Atmospheres, 101(D19):23851-23863. Kaufman, Y.J., A.W. Setzer, C.J. Tucker, M.C. Pereira, and I. Fung, 1990. Remote sensing of biomass burning in the tropics, Fire in Tropical Biota: Ecosystem Processes and Global Challenges (J.G. Goldammer, editor), Springer-Verlag, aerlin, pp. 371-399. Kaufman, Y.J., C.O. Justice, L.P. Flynn, J.D. Kendall, E.M. Prins, L. Giglio, D.E. Ward, W.P. Menzel, and A.W. Setzer, 1998. Potential global fire monitoring from EOS-MODIS, Journal of Geophysical Research, 103(D24):32215-32238. Kidwell, K.B., 1998. NOAA Polar Orbiter Data User's Guide (TIROSN, NOAA-6, NOAA-7, NOAA-8, NOAA-9, NOAA-10, NOAA-11, NOAA-12, NOAA-13 and NOAA-1I),NOAA-NESDIS, Washington, D.C., 143 p. N.Y.l A u g ~ ~ 2002 rr 837 Matson, M., and J. Dozier, 1981. Identification of subresolution high temperature sources using a thermal IR sensor, Photogrammetric Engineering 6- Remote Sensing, 47(9]:1311-1318. Matson, M., S.R. Schneider, B. Aldridge, and B. Satchwell, 1984. Fire Detection Using the NOAA Series Satellites, NOAA Technical Report NESDIS-7, NOAA, Washington, D.C., 34 p. Muirhead, K., and A.P. Cracknell, 1984. Identification of gas flares in the North Sea using satellite data, International Journal of Remote Sensing, 5(1):199-212. Nakayama, M., M. Maki, C.D. Elvidge, and S.C. Liew, 1999. Contextual algorithm adapted for NOAA-AVHRR fire detection in Indonesia, International Journal of Remote Sensing, 20(17):3415-3421. Penner, J.E., R.E. Dickenson, and C.A. O'Neill, 1992. Effects of aerosol from biomass burning on the global radiation budget, Science, 256(5062):1432-1434. Pereira, M.C., and A.W. Setzer, 1993, Spectral characteristics of deforestation fires in NOAAIAVHRR images, International Journal of Remote Sensing, 14(3):583-597. Rao, C.R., and J. Chen, 1999. Revised post-launch calibration of the visible and near infrared channels of the Advanced Very High Resolution Radiometer (AVHRR) on the NOAA-14 spacecraft, International Journal of Remote Sensing, 20(18):3485-3490. Roy, D.P., L. Giglio, J.D. Kendall, and C.O. Justice, 1999. Multi-temporal active-fire based burn scar detection algorithm, International Journal of Remote Sensing, 20(5):1031-1038. Running, S.W., C.O. Justice, V. Salomonson, D. Hall, J. Barker, Y.J. Daufman, A.H. Strahler, A.R. Huete, J.-P. Muller, V. Vanderbilt, Z.M. Wan, P. Teillet, and D. Carneggie, 1994. Terrestrial remote sensing science and algorithms planned for EOSIMODIS, International Journal of Remote Sensing, 15(17): 3587-3620. Saunders, R.W., and K.T. Kriebel, 1988. An improved method for detecting clear sky and cloudy radiances from AVHRR data, International Journal of Remote Sensing, 9(1):123-150. Thornton, P.E., 1998. Regional Ecosystem Simulation: Combining Surface and Satellite Based Observations to Study Linkages between Terrestrial Energy and Mass Budgets, Ph.D. Thesis, University of Montana, Missoula, Montana, 280 p. (Received 26 January 2001; accepted 29 January 2002; revised 27 February 2002) Certification Seals & Stamps gg B a 28 8 m m e 838 . Now that you are certified as a remote sensor, photogrammetrist or GIS/LIS mapping scientist and you have that certificate on the wall, make sure everyone knows! An embossing seal or rubber stamp adds a certified finishing touch to your professional product. You can't carry around your certificate, but your seal or stamp fits in your pocket or briefcase. To place your order, fill out the necessary mailing and certification information. Cost is just $35 for a stamp and $45 for a seal; these prices include domestic US shipping. International shipping will be billed at cost. Please allow SEND COMPLETED FORM WITH YOUR PAYMENT TO: ASPRS Certification Seals & Stamps. 5410 Grosvenor Lane. Suite 210. Bethesda. MD 20814-2160 NAME- PHONE: CERTlFlCATiON # EXPIRATION DATE i 9 rr8 3 II1( a a ADDRESS I cln: STATE: PLEASE SEND ME:O Embossing METHOD OF PAYMENT: ACCOUNT NUMBER a Check Seal .......... $45 Visa POSTAL CODE. COUNTRY. P Rubber Stamp $35 0 Mastercard American EXPIRES Express a ra a rrr a a a DATE 3-4 weeks for delivery. August 2002 PHOTOCRAMMETRIC ENGINEERING& REMOTE SENSING