Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
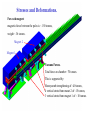
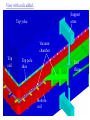
Tagger and Vacuum Chamber Design Outline. • Design considerations. • Stresses and deformations. • Mechanical assembly. Design Considerations. The basic tagger parameters are: •Main beam energy = 12 GeV. •Magnetic field = 1.5 T – 12 GeV radius of curvature = 26.7 m. •Momentum range of analysed electrons = 0.6 to 9.0 GeV/c. •Intrinsic average focal plane momentum resolution = 0.05% E 0 . •Decision to use an iron based magnet of reasonable size imposes a limit on the main beam bend angle of around 15 degrees. Adopted design. •Total main beam bend angle = 13.4 degrees. •Total length of focal plane (25% to 90% of E o ) ~ 9 m. The focal plane detector package is divided into two parts. Set of 141 fixed scintillators spanning the full energy range with 0.5 % resolution. Movable microscope of finely segmented counters with 0.1% resolution spanning the coherent peak – tagged photon energies between 8.5 and 9 GeV for GlueX. •Magnet configuration of two identical rectangular dipoles in series, in front of which there is a quadrupole to optimise the focal plane vertical focussing – the photon energies of interest to GlueX are analysed in the first magnet. For each: Gap width = 3.0 cm. Pole length = 3.1 m. Weight = 36 tonnes – heaviest single yoke piece ~13 tonnes. Coil power = 30 kW. •A straight focal plane with optics which are not inferior to those for a single dipole tagger. Reasons for adopting a two rather than a single dipole design. •Single dipole is ~ twice the length ( 6.2 m) and twice the weight (~75 tonnes) of the individual magnets in the two magnet configuration. •Difficult to find suppliers of ~ 6.5 m lengths of high quality iron at a reasonable cost. •Top and bottom yokes for the single magnet tagger each weigh ~26 tonnes which will require heavy duty lifting equipment to assemble the magnet or undertake future repairs or modifications. •The long structure of a single dipole tagger will be awkward to manoeuvre during installation. •The smaller magnets can be made by more manufacturers and will probably be cheaper. •Budget prices from a magnet supplier for the dipoles/vacuum chamber/dipole support stand are 13% less for the 2 magnet design. •Building costs will be less for the two magnet option – cheaper crane or rigging costs, smaller access doors etc. Vacuum chamber design. •Since the tagger is broad-band it analyses electron energies from 25% to 90% of Eo which are focussed along a focal plane ~ 9 m in length. •The structure of the vacuum chamber should not intercept any of the analysed electrons, and the chamber should extend to within a few cm of the focal plane. •The vacuum chamber should also allow the main electron beam to exit cleanly from the spectrometer. •A long (~12.5 m) relatively narrow (~0.8 m) chamber with no internal supports is required. •The design adopted uses the pole shoes of the dipole magnets as part of the vacuum system. The vacuum chamber fits around the pole shoes. Vacuum seals are made between a lip around each pole shoe and the top or bottom surfaces of the vacuum chamber. Compressed rubber O-rings form the vacuum seals. The two identical magnets tagger Vacuum chamber Magnet 2 Magnet 1 The vacuum force is around 70 tonnes, so the vacuum chamber needs external support. General view of the tagger showing the lay-out of the dipole magnets, focal plane and a selection of electron trajectories. 1 1 1 The electron entrance angle :5.9 degrees Main beam exit angle: 6.608 degrees Main beam bending angle 13.4 degrees The angle between the photon exit beam and the focal plane: 9.94 degrees Vertical section through one of the dipole magnets showing pole profile and coil geometry 1 • • • • • • • • Length: 3.09 m. Width: 1.09 m. Height:1.41m. Weight: ~38 Tons for one magnet. Conductor area: 135 cm2. Current: 144 A. Magnetic field: 1.5 T. Pole gap: 3 cm Vacuum chamber Top view Right hand side view looking along output flange Pumping port Front 1view 1 Vacuum chamber sections AA` and BB` Weld O-ring Groove Compression pad Enlarged view of output flange (The electron direction is out of the plane of the figure) For compression pad screws For compression fitting screws Vacuum window compression pad Bevelled edge To manufacture the vacuum chamber: a. Weld together complete assembly. b. Skim those parts of the top and bottom surfaces used for the vacuum seals to make them flat and parallel. Main flange bolt hole Stresses and Deformations. For each magnet: magnetic force between the poles is ~ 150 tonnes, weight ~ 36 tonnes. Magnet 2 Magnet 1 Vacuum Forces. Total force on chamber~ 70 tonnes. This is supported by: Honeycomb strengthening of ~40 tonnes, 4 vertical struts from manet 2 of ~15 tonnes, 3 vertical struts from magnet 1 of ~ 10 tonnes. Magnet stress calculation with magnetic, vacuum and weight forces - (3 point support defines boundary condition). 3 point supports Magnet deformation calculation with magnetic, vacuum and weight forces. (Maximum deformation in the pole gap is less than 0.21mm which is much smaller than the O-ring compression of ~6mm for the two O-rings – the uncompressed diam. of each o-ring is 10 mm) 3 point supports Vacuum chamber stress analysis - (for complete chamber). 1. Stainless steel – walls 15mm, ribs 20mm*160mm. Vacuum chamber stress analysis – (for complete chamber). 1. Stainless steel – walls 15mm, ribs 20mm*160mm . Boundary condition: gap between pole shoes and vacuum chamber side walls allowed to vary by 0.1 mm. Vacuum chamber stress analysis – (for complete chamber). 2. Aluminium – walls 15mm, ribs 20mm*160mm. Stresses on both the SS and Al chambers approximately the same. Vacuum chamber stress analysis – (for complete chamber). 2. Aluminium. Deformation of Al chamber ~3 times that for SS chamber. Mechanical Assembly. Vertical section showing the arrangement for compressing the vacuum O-rings. Rods connected between yoke and vacuum chamber used to apply compression to the O-rings. Rubber O-ring. * Vertical sections showing how O-ring compression is defined. Back of vacuum chamber Spacer Compressed O-ring Bottom pole shoe Vertical section showing how coils are supported against magnetic forces. Vertical sections showing brackets which counteract the magnetic forces on lower coils. Pads . Vertical section showing how the weights of the lower coils are supported. (Upper coil weights supported by magnetic force brackets.) Vertical sections showing lower coil weight support brackets. Brackets O-ring compression along exit face. Magnetic force and weight of coils. O-ring compression along the back and side walls of vacuum chamber. Sequence of brackets– outwith exit face. Top pole shoe Vacuum chamber Bottom pole shoe Bottom yoke Sequence of brackets– along an exit face for a top yoke. Top yoke Vertical rods are equispaced. Pole shoe Top surface of vacuum chamber View with coils added. Support arms Top yoke Vacuum chamber Top coil Top pole shoe Exit flange Bottom coil The Tagger and vacuum chamber assembly procedure will be described in one of the following presentations.