Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
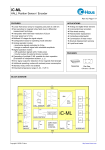
BF-10 Magnetic Field Induction Sensor BF magnetic sensors are constructed using a highmagnetic-permeability, mu-metal core with proprietary windings. The coil windings are shielded and epoxy potted inside a Black Amalgon housing. Performance Frequency range: 0.1 to 10 kHz ■ 3-dB frequency corners: 0.2 Hz to 10 kHz ■ Sensitivity (flat region): 0.3 V/nT (standard) ■ Power consumption: 9 mA at ±12 V ■ Each sensor includes a matched low noise preamplifier, normally mounted at one end of the coil tube using a waterproof O-ring assembly. The sensor is optimized to maximize noise performance for a given length/weight specification. Mechanical Specifications Housing: Black Amalgon® straight tube ■ The BF-10 sensor utilizes a magnetic feedback design to yield a stable flat response over several decades of frequency; here, the sensors respond as a B field detector. At frequencies below the flat region, the response is proportional to frequency. The BF-10 sensor is ideal for controlled source audio-frequency magnetotelluric (CSAMT) surveys. Length: 142 cm (56 in) ■ Diameter: 6 cm (2.4 in) ■ Weight: 7.9 kg (17.4 lbm) ■ Connector: 8-pin Tajimi APPLICATIONS ■ The BF-10 may be customized for a variety of applications, including: geophysical surveys (magnetotelluric, audio-magnetotelluric, controlled-source audio frequency magnetotelluric, magnetometric resistivity, magnetic induced polarization, controlled-source electromagnetic, tensor-source high-frequency magnetotelluric, Stratagem™), marine surveys, earthquake studies, and high-accuracy magnetic field studies. pinout Specifications 8-pin Tajimi connector pinout: 23A16-8AM ■ Connector mating part: 23B16-8AF ■ Dust cap: 16RC ■ Signal– B Ground Ground V+ (+12 V) C V– (–12 V) G A Signal+ F Cal– Cal+ H E D FREQUENCY RANGE NOISE PERFORMANCE 1 10 80 1 60 Amplitude 10 -1 20 Phase 10-1 0 -20 -40 -60 -80 10-2 10-1 1 10 102 103 Frequency, Hz 104 105 -100 Sensor noise, nT/Hz 40 Phase, ° Amplitude, V/nT 100 BF-10 BF-4 10 -2 BF-6 10-3 BF-7 10-4 10-5 10-6 10-7 10 -8 10-4 10-3 10 -2 10 -1 1 10 Frequency, Hz Company, product, and service names are the properties of their respective owners. Copyright © 2008 Schlumberger. All rights reserved. 08-OF-107 10 2 103 104 105