Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Hunting oscillation wikipedia , lookup
Jerk (physics) wikipedia , lookup
Inertial frame of reference wikipedia , lookup
Mechanics of planar particle motion wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Equations of motion wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Classical central-force problem wikipedia , lookup
Centripetal force wikipedia , lookup
Fictitious force wikipedia , lookup
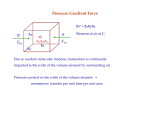
Lecture 19 Equations of Motion for Noninertial Systems • From last lecture we derived the general expression for the acceleration in the fixed system in terms of the acceleration in the rotating system (see Eq. 18.11. • We may thus obtain the fundamental equation of motion by multiplying 18.11 by m, F~ = m~a = m~a0 + mω ~˙ × ~r0 + 2m~ω × ~v 0 + m~ω × (~ω × ~r0 ) 0 which if we identify F~ = m~a0 and label F~ = F~ physical , then we may rewrite the above equation as, 0 0 0 0 F~ = F~ physical + F~ cor + F~ trans + F~ centrif (19.1) where, 0 F~ cor = −2m~ω × ~v 0 : Coriolis Force – Tends to deflect a moving object at right angles to its direction of motion. – Responsible for circulation of air around high or low pressure systems → for high pressure, air flows from the high to the low, deflecting to the right and creating a clockwise circulation (in the southern hemisphere, the opposite is true). 0 F~ trans = −mvw ˙ × ~r0 : transverse force: – Only present if there is an angular acceleration of the rotating coordinate system. ¡ ¢ F~ cent0 = −m~ω × ω ~ × ~r0 : Centrifugal Force. – Arises from rotation about an axis. – It is directed outward, away, from the axis of rotation and is perpendicular to that axis. Example 19.1 A bug crawls outward with a constant speed v 0 along the spoke of a wheel that is rotating with constant angular velocity ω ~ about a vertical axis. Find all the apparent forces acting on the bug. y’ Centrifugal force F ω x’ Coriolis force We take the bug to be moving along the x0 axis, then ~r˙ 0 = v 0 î, → ~¨r0 = 0 Therefore, the Coriolis force is, 0 0 −2m~ω × ~r˙ 0 = −2mωv 0 (k̂ × î ) = −2mωv 0 ĵ 0 and the transverse force is simply, −mω ~˙ × ~r0 = 0 Finally, the centrifugal force is calculated as, h 0 i ¡ ¢ 0 0 −m~ω × ω ~ × ~r0 = −mω 2 x0 k̂ × (k̂ × î ) 0 = mω 2 x0 î Now since the bug is not accelerating within the rotating frame, ~a0 = 0, and thus 0 0 0 F~ = m~a0 = 0 = F~ physical + mω 2 x0 î − 2mωv 0 ĵ , or 0 0 F~ physical = −mω 2 x0 î + 2mωv 0 ĵ where F~ physical represents the actual physical force exerted on the bug by the spoke. How far does the bug crawl before he/she begins to slip? The maximum value of the force due to friction is µs mg. Therefore, slipping begins when, |F~ | = µs mg h i ¡ ¢2 1/2 2 (2mωv 0 ) + mω 2 x0 = µs mg ¤1/2 £ 2 2 µs g − 4ω 2 (v 0 )2 0 ∴, x = ω2 ¨