Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
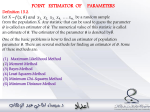
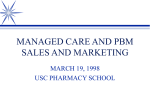
The provision of this paper in an electronic form in this site is only for scholarly study purposes and any other use of this material is prohibited. What appears here is a near-publication draft of the final paper as appeared in the journal or conference proceedings. This is subject to the copyrights of the publishers. Please observe their copyrights. A Novel High Breakdown M-estimator for Visual Data Segmentation Reza Hoseinnezhad Swinburne University of Technology Victoria, Australia Alireza Bab-Hadiashar Swinburne University of Technology Victoria, Australia [email protected] [email protected] Abstract Most robust estimators, designed to solve computer vision problems, use random sampling to optimize their objective functions. Since the random sampling process is patently blind and computationally cumbersome, other searches of parameter space using techniques such as Nelder Meade Simplex or gradient search techniques have been also proposed (particularly in combination with PbMestimators). In this paper, we introduce a novel high breakdown M-estimator having a differentiable objective function for which a closed form updating formula is mathematically derived (similar to redescending M-estimators) and used to search the parameter space. The resulting M-estimator has a high breakdown point and is called High Breakdown Mestimator (HBM). We show that this objective function can be optimized using an iterative reweighted least squares regression similar to redescending M-estimators. The closed mathematical form of HBM and its guaranteed stability combined with its high breakdown point and fast convergence speed make this estimator an outstanding choice for segmentation of multi-structural data. A number of experiments, using both synthetic and real data have been conducted to show and benchmark the performance of the proposed estimator both in terms of accurate segmentation of numerous structures in the data and also the convergence speed. Moreover, the computational time of HBM, ASSC, MSSE and PbM are compared using the same computing platform and the results show that HBM significantly outperforms aforementioned techniques. 1. Introduction Since the introduction of RANSAC [3], a quarter of century ago, several high breakdown robust estimators have been specially designed to solve computer vision problems (e.g. RESC[14], ALKS[6], MSSE[1], ASSC[13] and Projection based M-estimators [2, 8, 9, 7] also called PbM). All such estimators include three main steps: • Optimization: Searching the parameter space to find the parameter values which optimize the objective function of the estimator. • Segmentation: Extracting an inlier-outlier dichotomy using the parameters given by the searching process. • Refinement: Updating the parameter estimates with a least-squares fit to the extracted inliers. The robust estimators reported in computer vision so far, mainly differ in their objective functions and the way they extract an inlier-outlier dichotomy. For the objective function optimization, almost all robust estimators (except PbM) use random sampling. The main reason is that the objective functions used in those high breakdown robust estimators are non-differentiable and optimization methods based on gradient and iterative reweighted least-squares regressions (as in redescending Mestimators1 ), cannot be employed. Random sampling is a random search scheme in the sample space for the best elemental subset (p-tuple) that gives rise to the parameter values which optimize the objective function. An elemental subset is a subset of p data samples (p is the dimension of parameter space) that defines a full rank system of equations from which a model candidate can be computed. If N elemental subsets are randomly selected, then with a probability of: N Psuccess = 1 − [1 − p ] (1) at least one of them is a good elemental subset (i.e. all its samples belong to the inlier structure), where is the ratio of inliers samples. Thus, for a given success probability Psuccess , at least: N= log(1 − Psuccess ) log(1 − p ) (2) 1 It is important to note that redescending M-estimators do not have high breakdown points and cannot be efficiently employed to solve visual data segmentation problems particularly with several data structures. elemental subsets should be randomly examined. 2. High Breakdown M-estimator Two important observations are highlighted here: Firstly, the value of N given by equation (2) is a lower bound as it implies that any elemental subset which contains only inliers provides a suitable model candidate. This assumption is not always true, specially if the measurement noise is significant [7]. Secondly, for cases involving multi-structural data, the above minimum number of random p-tuples can be substantial and the computational load of segmentation would be too high for real-time (or near real-time) applications. It is important to note that the inlier ratio is not priorly known and in equation (2), should be taken as the smallest possible ratio of inliers in the application. Consider a vision problem that involves segmentation of several data structures. From each structure, ni measurement samples denoted by {yi ; i = 1, . . . , ni } are available and each sample yi ∈ Rp is corrupted with independent and identically distributed (i.i.d.) noise: The number of required elemental subsets can be significantly reduced when information regarding the reliability of the data points is available (either provided by user or derived from the data through an auxiliary estimation scheme). Guided sampling techniques, choose the elemental subsets by directing the samples toward the points having higher probabilities of being inliers [11, 12]. However, in most visual data segmentation problems, sufficiently reliable information to guide the sampling is not available [7]. An alternative approach to random sampling proposed as an optimization strategy for PbM is to use techniques like Nelder-Mead Simplex search [7, 2]. Simplex is a heuristic search technique and it is highly sensitive to its initialized search point in parameter space. Therefore, substantial number of initializations are commonly required to guarantee that the global minimum (or maximum) of the objective function would be found by the Simplex search. Subbarao and Meer [9, 10] have proposed using a local search (based on the first order conjugate gradient method of a Grassman manifold of the parameter vector θ ∈ Rp satisfying θ > θ = 1) in the neighborhood of each elemental subset. However, since the objective function of PbM estimator is not differentiable, the dependence of the α parameter (in the common errors-in-variables regression model as explained later in this paper) on the parameter vector θ has to be ignored. Therefore, the procedure of local optimization needs to be repeated for several elemental subsets. In this paper, we introduce a new high breakdown estimator with a differentiable objective function that can be optimized through an iterative reweighted least square regression scheme. Since the redescending M-estimators employ similar continuous updating formulas for their search scheme we call the new technique: High Breakdown Mestimator or HBM estimator for short. Our studies show that the proposed technique can segment structures with population ratios of less than 20% significantly faster than other modern high breakdown techniques. yi = yio + δyi ; δyi ∼ GI(0, σ 2 Ip ) (3) where yio is the true value of yi , GI(.) stands for a general symmetric distribution of independent measurement noise samples and σ is the unknown scale of noise. Usually, noise distribution is assumed to be normal however the measurement noise does not necessarily have to be normally distributed. Indeed, characterizing the distribution by its first two central moments in equation (3) implies normality assumption as only a normal distribution can be uniquely characterized this way. Each data structure can be modeled by the following linear errors-in-variables (EIV) regression model: > yio θ − α = 0 ; i = 1, . . . , ni (4) where θ ∈ Rp and α are the model parameters yet to be estimated for each structure and the following constraints are imposed to eliminate the ambiguity of the model parameters being defined up to a multiplicative constant: ||θ|| = 1 ; α ≥ 0. (5) Since the proposed HBM estimator does not calculate the θ̂ and α̂ estimates separately, we augment those parameters and rewrite the model as below: x> io Θ = 0 ; i = 1, . . . , ni (6) > > where xio = [1 yio ] and Θ = [α θ > ]> . Thus, the measurements are denoted by xi = [1 yi> ]> and we slightly modify the constraints (5) as shown below: Θ(1) ≥ 0 ; ||Θ|| = 1. (7) For a given parameter estimate Θ̂, each data sample xi corresponds to an algebraic distance ri = x> i Θ̂. With traditional regression models, these distances are called residuals and we also use this popular term in this paper. In the least k-th order statistics (LkOS) estimator, the objective function is the k-th order statistics of the squared residuals: 2 JLkOS (Θ̂) = rk:n (8) where n is the total number of available data samples. The order k is given by k = dne where is the minimum possible ratio of inliers in the application. The breakdown point of LkOS estimator can be higher than 50%. More precisely, provided there are moderate number of samples in the target structure, the breakdown point is (1 − ) × 100%. The objective function (8) is usually optimized using random sampling. In the proposed HBM estimator, the functional form of the k-th order statistics of the squared residuals is chosen as objective function. For a given parameter estimate Θ̂, the squared residuals {zi = ri2 ; i = 1, . . . , n} have a statistical distribution that can be estimated by the following kernel density estimator: n fΘ̂ (z) = 1 X K nh i=1 z − zi h (9) K(u)du = 1 (10) K(u) = K(−u) ≥ 0 K(u1 ) ≥ K(u2 ) for |u1 | ≤ |u2 | (11) (12) and h is the kernel bandwidth. The value of the bandwidth has a weak influence on the result of the M-estimation [7] and we use the following formula to calculate it based on a median of absolute differences (MAD) estimate [7, 2, 8, 9, 10]: 1 h = n− 5 medi |zi − medj zj |. (13) The objective function of the HBM estimator is given by: JHBM (Θ̂) = z = FΘ̂−1 () (14) where FΘ̂−1 (.) is the inverse cumulative distribution function (inverse CDF) of the squared residuals. The CDF of the squared residuals is the following differentiable function of Θ̂: n Z 1 X z α − zi K dα. FΘ̂ (z) = nh i=1 −∞ h (15) Therefore, the inverse CDF is also differentiable and can be optimized by solving the following equation: Θ̂=Θ∗ = = ∂FΘ̂ (z ) ∂ Θ̂ Pn 1 i=1 nh Pn 1 i=1 nh R z α−zi ∂ K dα h −∞ ∂ Θ̂ ∂z i K( z −z h )+ ∂ Θ̂ R z ∂ i K α−z dα h −∞ ∂ Θ̂ (18) To optimize the objective function, the condition (16) should be satisfied. Thus, in the above equation we replace with zero: the term ∂z ∂ Θ̂ = = Pn R z ∂ α−zi 1 dα i=1 −∞ ∂ Θ̂ K nh h Pn R z ∂zi 0 α−zi −1 K dα i=1 −∞ nh2 h i Pn ∂zi h ∂ Θ̂z −zi 1 K − K(−∞) . 2 i=1 ∂ Θ̂ h h (19) +∞ −∞ ∂FΘ̂−1 () ∂ Θ̂ 0= 0= where K(.) is a kernel function with the following properties: Z By differentiating both sides of (17), the following equations are derived: ∂z = ∂ Θ̂ = 0. (16) Θ̂=Θ∗ For any parameter estimate we have: = FΘ̂ (JLkOS ) = FΘ̂ (z ) (17) The dependence of the bandwidth on the parameter estimates has been ignored in the above derivations as the bandwidth given by equation (13) does not substantially vary with Θ̂ (and ∂∂h is small) and the size of bandwidth (and Θ̂ therefore its variations) do not substantially affect the performance of the estimator [7, 10, 2, 8, 9]. From the kernel properties (10)-(12) we have K(−∞) = 0. i i with 2ri ∂r the following By replacing the term ∂z ∂ Θ̂ ∂ Θ̂ equation is derived: n X 1 z − zi ∂ri = 0. K ri 2 h h ∂ Θ̂ i=1 (20) As it is the case for redescending M-estimators, the above equation can be iteratively solved by updating the parameters through iterative reweighted least squares regression on the data with the following weights: 1 z − ri2 wi = 2 K . (21) h h Provided there are moderate number of data samples, the functional form of the k-th order statistics, z can be approximated with its sample value: 2 1 rk:n − ri2 wi = 2 K . (22) h h This is equivalent to an M-estimator with the objective funcP r 2 −r 2 tion i ρ( k:nh i ) where ρ(.) is proportional to the integral of the chosen kernel function. For example, for a Gaussian 2 1 kernel K(u) = √12π exp( −u 2 ) we have ρ(u) = h2 Φ(u) where Φ(.) is the CDF of standard normal variables. Figure 1 shows the ρ(.) function plotted versus sample residuals. It is important to note that in contrast to redescending M-estimators, ρ(.) does not merely depend on r but also on ICCV ICCV #**** #**** ICCV 2007 Submission #****. CONFIDENTIAL REVIEW COPY. DO NOT DISTRIBUTE. 432 433 434 486 ρ(r) 1/h2 1for NN times: 1- Repeat Repeatthe thesteps steps2-8 2-8 for times: 2(p-tuple) by by 2- Choose Chooseananelemental elementalsubset subset (p-tuple) random randomsampling; sampling; 3model 3- Compute Computethe thecorresponding corresponding model candidate estimate) Θ̂;Θ̂; candidate(parameter (parameter estimate) 4{ri{r } and {zi {z } and 4- Calculate Calculatethe theresiduals residuals } and i i } and the from thekernel kernelbandwidth bandwidth from equation equation(13); (13); 435 436 437 438 439 440 1−2Φ(rk:n/h) 441 442 2h2 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 residuals (r) Figure 1. The curve) modified (lower Figure 1. original The ρ(.)(upper function plot and for Gaussian kernels.curve) ρ(r) functions for Gaussian kernels. 491 492 493 494 495 496 497 498 499 500 501 the k-th order statistics of all squared residuals. Therefore, statistics of all squared residuals. Therefore, HBM is not a 502 HBM is not a typical redescending M-estimator. However, redescending M-estimator. However, this distinction is the 503 as it was shown in the previous paragraphs, the dependence main reason of its high breakdown point as we mathemati504 of ρ(.) on rk:n is the direct result of iterative optimization of cally demonstrated that using this M-estimator is equivalent 505 the functional form of rk:n which in turn affords the HBM new to optimizing the functional form of the k-th order statistics 506 8If || Θ̂ − Θ̂ || is larger than a given (application specific) threshold, then new estimator to residuals. have a high breakdown point. of squared 507 (application threshold, replace Θ̂ with specific) Θ̂new and repeat the then InThe practice, sincewith the the ρ(.)aforementioned function assigns steps 2-6;Θ̂ otherwise and its replace with Θ̂newsave and Θ̂repeat the M-estimator ρ(.) relatively function 508 2 . large weights to residuals larger than ras , these weights corresponding rk:n steps 2-6; otherwise save Θ̂ and its k:nobserved is robust and high breakdown. However, in Fig509 2 corresponding 9- The final model restimate is one of the have to this be curbed in assigns order torelatively stop the large estimator returning k:n . ure 1, function weights for thea 510 saved estimates yielding is theone smallest 9- NThe final model estimate of the bridging where closeinstructures in data. In our residualsfitover rk:nthere . As aare result, cases involving segmen511 k-th orderestimates statisticsyielding of the squared N saved the smallest implementation, arewhich set to zero to mutually remove their tation of multiplesuch dataweights structures are not far 512 residuals. k-th order statistics of the squared ICCV influence and reduce the computational cost. and easily distinctive from each other, the M-estimator may 513 residuals. #**** Figure 2 shows algorithmfor of the HBM return bridging fitsthe as optimization it tries to compromise large 514 Figure 2. Optimization algorithm ofSubmission the HBM estimator. ICCV 2007 #****. CONFIDENTIAL REVIEW COPY. D residualsfunction. of leverageSteps points6 belonging to neighboring struc515 objective and 7 in this algorithm are reFigure 2. Optimization algorithm of the HBM estimator. tures. to This event wasthe alsoweighted evidenced through extensive 516 quired implement total least our squares solu540 sets given by (2). A similar process involving multiple ransimulations involving segmentation of synthetic andthe real vi517 tion for the parameter estimate Θ̂ and satisfying prop4 541 dom initializations is also implemented in the PbM estimasual data. this issue, we slightly modify the ob518 erties givenToinresolve (7). Like the redescending M-estimators, 542 tor (with conjugate2gradient search [10, 9]) but its required jective function of the reweighted M-estimatorleast in such a wayprocedure that con519 the proposed iterative squares 543 number of initializations is several times larger than HBM stantalso weights are assigned the minimum residuals over rk:nobjective (see the 520 may be trapped in a to local of the 544 0 simulation results. It is important to as evidenced by our lower curve in Figure To implement the optimization 521 function and should be 1). repeated with different random ini- 545 note that the algorithm shown in Figure 2 is only the optiprocess, only the k data the smallest residu-is 546 522 tializations. However, thesamples requiredwith number of repetitions −2 mization part of HBM and should be followed by a segmenals are incorporated in the iterative reweighted least squares 523 far less than the number of random elemental subsets given 547 tation algorithm. −4 We suggest MSSE [1, 2] to be used for regression for updating the parameter estimates in each it548 524 by (2). A similar process involving multiple random ini−1 of its low computational 0 1load, high segmentation because 549 eration: 525 tializations is also implemented in the PbM estimator (with 550 x in applications involvlevel of consistency and small bias 2 ( 526 conjugate gradient search rk:n −ri2[10, 9]) but its required number 1 551 ing close data structures [5]. if |ri | ≤ rk:n 527 2K h h Figure 3. A snapshot of the simulations in two dimensional pawi = of initializations is several times larger than HBM as(23) evi- 552 528 Figurerameter 3. A space snapshot of thethe data pointsnumber in theoftwo dimensional 0. otherwise to examine required random initialdenced by our simulation results (see Section 3). It is im- 553 study for comparing the number of random initializations required 529 izations. 3. Simulation Results portant to note that the algorithm shown in Figure 2 is only 554 by HBM and PbM. 530 Figure 2 shows the algorithm of objective function opti555 the optimization part of HBM and should be followed by 1 531 We have examined the performance of HBM estimator mization as applied in the HBM estimator. Steps 6 and 7 in a this segmentation algorithm. suggest MSSE for 556 532 through extensive comparative case studies involving synalgorithm are required We to derive the using weighted total[1] least HBM 557 0.8 results of only two ofPbM segmentation because of parameter its low computational load, high 558 spacedata limitations, our experiments 533 thetic and realthe 3-D range data segmentations. Due squares solution for the estimate Θ̂ and satisfylevel of consistency and small applications involvpresented here. In the first case, 100 synthetic datasets 559 534 toare space limitations, two of our simulation studies are preLikeinthe redescending Ming the properties given in (7).bias 0.6 ing close datahere structures [5]. reweighted least squares prowere generated around the line 560 sented here. In theeach firstincluding presented100 casesamples study, 100 synthetic estimators, the iterative 535 561 y = x were with generated their x varying within [−1, and their y cor536 datasets each including 100 1] samples around cedure may also be trapped in a local minimum of the ob562rupted with normal additive noise N (0, 0.03). Each dataset 537 the line y = x 0.25 with their x varying within [−1, 1] and function and should be repeated with different ran3.jective Simulation Results 563 1gross 15 outliers 30 additive 45 uniformly 60 noise 75 90 also yincluded distributed in their corrupted200 with normal N (0, 0.03). dom initializations. However, the required number of repe538 Number of Initialisations 564 [−1,dataset +1] ×also [−4,included +4]. A200 snapshot of the uniformly synthetic disdata is We have thenumber performance of HBM estimator 539 Each gross outliers titions is farexamined less than the of random elemental sub565 3. For each dataset, the linear structure was in Figure through extensive comparative case studies involving syn- 566shown Figure 4. Success rates of segmentation in the two-dimensional Figure 5. (a) A pic 3 for(with HBM conjugate and PbM estimators. simulation studyHBM shown in Figure using and PbM gradient sults of range segm thetic data and real 3-D range data segmentations. Due to 567segmented 5 y 445 + rk:n 489 490 Success Rate (%) 443 444 − rk:n 0 2 5rk:n 2 and 5- Sort Sortthe theresiduals, residuals,find find rk:n and calculate the weights wi using calculate the weights wi using equation (23). Reorder the data in an equation (22). Reorder the data in an ascending order of their corresponding ascending order of their corresponding residuals and calculate √ √ calculate residuals and w 1 x1 · · · w X=[ √ √k xk ]⊤ ; X = [ w1 x1 · · · wk xk ]> ; 6- Calculate the singular value 6- decomposition Calculate theofsingular value X and find the decomposition of X and find the eigenvector v = [v 1 . . . vp+1 ] corresponding eigenvector v =eigenvalue; [v1 . . . vp+1 ] corresponding to the smallest to the smallest v eigenvalue; 7- Calculate Θ̂new = ||v|| sign(v1 ) where v 7- sign(v Calculate Θ̂ = new 1 ) where ≥ 0 sign(v and −1 1 ) is +1 for v1||v|| sign(v1 ) is +1 for v1 ≥ 0 and −1 otherwise; otherwise; 8- If ||Θ̂ − Θ̂ || is larger than a given 487 488 568 569 570 571 572 573 574 tributed in [−1, +1] × [−4, +4]. Then for each dataset, the linear structure was segmented using HBM and PbM (with conjugate gradient local search scheme) and the success rate (the ratio of successful segmentations) was recorded. A snapshot of the synthetic data and the segmented line is M ASSC (ra PBM (ran MSSE (ra PBM (con ICCV ICCV #**** ICCV #**** ICCV 2007 Submission #****. CONFIDENTIAL REVIEW COPY. DO NOT DISTRIBUTE. #**** ICCV #**** ICCV 2007 Submission #****. CONFIDENTIAL REVIEW COPY. DO NOT DISTRIBUTE. 540 540 545 545 22 yy 543 543 544 544 594 44 541 541 542 542 00 546 546 547 547 −2 −2 548 548 −4 −4 −1 −1 549 549 550 550 00 xx 11 (a) (a) 551 551 552 552 (a) Figure 3. 3. A dimensional pa-paFigure A snapshot snapshot ofofthe thesimulations simulationsinintwo two dimensional rameter space to examine the required number of random initialFigure 4. The fit returned by HBM in the two dimensional study. 553 rameter space to examine the required number of random initial553 izations. izations. 554 554 555 555 557 557 558 558 559 559 560 560 561 561 562 562 563 563 564 Success Rate (%) Success Rate (%) 556 556 0.8 597 598 597 598 599 599 600 601 600 601 602 602 603 604 603 604 605 606 605 606 608 609 610 1 0.8 595 596 607 1 HBM HBM PbM 611 612 PbM 613 614 0.6 0.6 615 0.25 0.251 1 15 30 45 60 75 90 Number Initialisations 15 30 of45 60 75 90 616 617 (b) 594 595 596 618 607 608 609 610 611 612 613 614 615 616 617 Number of Initialisations 619 618 (b) (b) 4. Success ratesofofsegmentation segmentation ininthethe two-dimensional 566 620 565 619 FigureFigure 5. Success rates two-dimensionalFigure 5. (a) A picture of the scanned pentagonal pyramid (b) Re3 for HBMinand PbM estimators. simulation study shown inof Figure Figure 4. Success rates segmentation the 567 566 620of Figure 6. (a) A by picture of thepentagonal scanned pyramid polyhedra (b) 621 Results of range segmentation HBM estimator. 3 for HBM andtwo-dimensional PbM estimators.sultsFigure simulation study shown in Figure 5. (a) A picture of the scanned (b) Re565 564 568 567 569 568 570 569 simulation study shown in Figure 3 for HBM and PbM estimators. tributed in [−1, +1] × [−4, +4]. Then for each dataset, the linear structure HBM PbM local tributed search scheme) shown inusing Figure 4 and -each and the(with success 571 in [−1,was +1]-segmented × [−4, +4]. Then for dataset, the 570 conjugate gradient search scheme) andwas the recorded. success 572 rate (the ratio of successful segmentations) linear structure waslocal segmented using HBM and PbM (with 571 rate (the ratio of successful segmentations) was recorded. 573 574 segmentation estimator. sultsrange of range segmentationby by HBM HBM estimator. 622 623 Method Processing Time 624 ASSC (random sampling) 308Processing s Time Method Processing Method Time 625 PBM (random sampling) 261 s ASSC (random sampling) 308 s 626s ASSC (random sampling) 308 MSSE (random sampling) 234 s 627 PBMPBM (random sampling) 261 s (random 261 s PBM (conjugate gradient) sampling) 83 s 628 MSSE (random sampling) 234 s HBM (random sampling) 22 s MSSE 234 s 621 622 623 624 625 conjugate gradient local search scheme) and the successthe For different numbers random initializations, 626 A snapshot of the syntheticofdata and the segmented line is rate (the ratio of successful segmentations) was recorded. 573aboveshown 627 procedure was repeated and the success rates were in Figure 3. 575 629 PBM (conjugate gradient) 83 s A snapshot of the synthetic data and the segmented line is 574recorded. 628 PBMHBM (conjugate gradient) 83 s 5 shows theofrecorded success rates the plottedTable 1. Comparative ForFigure different numbers random initializations, 576 630 22 s processing times elapsed for segmentation shown in Figure 3. 575 629 procedureof was repeatedinitialization and the success rates were HBM 22 577 631s versusabove the number random applied in eachof the five patches scanned from the pentagonal pyramid in FigFor different random initializations, 576 630 shows theof recorded success rates plottedthe ure Table recorded. Figure 4numbers 578 632 1. Comparative processing times elapsed for segmentation 5. method. It is observed that in this the PbM estimator above repeated andcase, the success were 577 631 versus procedure the numberwas of random initialization appliedrates in each 579 633 of the five patches scanned from the pentagonal pyramid infor FigTable 1. Comparative processing times elapsed segmentation needsrecorded. at leastItFigure 60 trials ofthat random initializations toplotted achieve ure 5. 4 shows the recorded success 578 method. is observed in this case, the PbMrates estimator 580 634 of the five patches scanned from the pentagonal pyramid in 632 Figa success of 60 98% thisinitialization can be achieved by HBMpling) and versus number ofwhile random applied in each needsrate atthe least trials of random initializations to achieve 579 633 581 635 6. (once using random sampling and once with urePbM method. Itrate isonly observed that this inThe this the PbM a success of 98% while cancase, be achieved byestimator HBM estimator with 20 trials. gradient search appliedconjugate gradient search). For each estimator, the pro580 634 582 636 estimator with 60 only 20 trials. The gradient applied needs at least trials of random initializations to achieve times elapsed for using the required pling) and PbM (once randomcomputations sampling andwere once with 637 635 583 581 in PbM estimator needs more search trialssearch perhaps due tocessing PbM estimator many this search as becausebyofHBM its 1. ForFor comparison purposes, as listed in Table ainsuccess of needs 98% while cantrials be and achieved conjugate gradient search). each estimator, pro- 638 636 584 582 its locality andrate inaccurate assumptions, many trials arerecorded 4600 as calculated from equation (2) withthe = 0.10, p = 3 inaccuracywith and only locality, is highly likely to either performed using the same computing were 639 estimator 20 each trials.trial The gradient search applied all computations 585 cessing timeswere elapsed for the required computations 583 637 likely to either diverge or be trapped in a local minimum. and P = 0.99. For HBM estimator and PbM success diverge be trapped in amany local minimum. and as were programmed MATLAB 586 in PbM or estimator needs search trials as because of its platform For comparison purposes, 640 (using recorded listed in Table in1.MathWorks’ 584 638 conjugate gradient search), theofminimum number of programming environment. The number random time ofofHBM waslikely also compared 587 Computation 641random Computation time HBM estimator was compared to inaccuracy and locality, eachestimator trial is highly to either all computations were performed using the same samcomputing 585 639 forinitializations MSSE, (using random sampling) 588 otherestimators estimators inina number of real range for PbM the 99% rate have been 642 applied. to other a innumber of 3D real 3Dsegmentation range segmen-plesplatform diverge or be trapped a local minimum. andASSC were and programmed insuccess MathWorks’ MATLAB 586 640 were 4600 as calculated from equation (2) with of ǫ = 0.10, sam- 643 Onetime of them shownestimator in Figure 5 involves 589 programming environment. The number random The results show that HBM estimator is substantially 587 641 tationexperiments. experiments. The of one of those issegshown Computation ofresults HBM was compared to p =ples 3 and 0.99.and For PbM HBM(using estimator and PbM 590 644 mentation of five patches scanned from a pentagonal pyrasuccess = forPMSSE, ASSC random sampling) 588in Figure 642 other estimators ininvolves a numbersegmentation of real 3D rangeofsegmentation faster than other high breakdown robust estimators that use 6 which five patches (using conjugate gradient search), the minimum number of 591 645 mid as depicted in Figure 5(a). The result of segmentation wererandom 4600 assampling. calculated from equation (2) with ǫ = 0.10, robustness experiments. One of of them shown polyhedra in Figure 5 as involves seg- inrandom 589scanned 643 In addition, the theoretical from a side a uniform depicted initializations have been applied. by HBM is shown in Figure 5(b) and similar results were 592 p = 3 and Psuccess = 0.99. For HBM estimator and PbM 646 644 590 mentation of five patches scanned from a pentagonal pyraand stability of HBM HBMestimator estimator (as discussed in647 previous Figure 6(a). The of segmentation by HBM is samshown in The 593 obtained usingresult MSSE[1] and ASSC [13] (with random results show that is substantially (using conjugate gradient search), the minimum number of 591 645 mid as depicted in Figure 5(a). The result of segmentation section) means that it requires far less random initializaFigure 6(b) and similar results were obtained using MSSE random initializations have been applied. by HBM is shown in Figure 5(b) and similar results were 592 646 tionsresults compared to PbM conjugate gradient ASSCusing [13]MSSE[1] (with random sampling) PbMsam(once 6 593[1] and 647 obtained and ASSC [13] (withand random The show that HBMestimator estimator using is substantially search, and hence is considerably faster. using random sampling and once with conjugate gradient We have also compared the performance of HBM estisearch). For each estimator, the processing time is recorded 6 mator with pbM and MSSE for solving the fundamental and listed in Table 1. For comparison purposes, all computations were performed using the same computing platmatrix estimation problem using both synthetic and real image pairs [4]. This is a much higher dimensional problem form and were programmed in MathWorks’ MATLAB pro(compared to range segmentation) and therefore, the cost gramming environment. The number of random samples of computation by a RANSAC-based technique is also subfor MSSE, ASSC and PbM (using random sampling) were 572 stantially higher as a large number of random samples is required to solve this problem. The results of our study again show that HBM is substantially faster than the other two techniques while the segmentation performances of the three estimators (in terms of small estimation error and correct number of inliers) are comparable. 4. Conclusions A computationally efficient high breakdown robust estimator, called HBM estimator, was introduced for solving multi-structural data segmentation problems encountered in various computer vision applications. HBM estimator has a novel differentiable objective function for which a closed form updating formula can be mathematically derived (similar to redescending M-estimators) and used to optimize its objective function. The resulting M-estimator has a high breakdown point as it minimizes the functional form of the k-th smallest squared residual. We have mathematically proved that optimization of this objective function can be achieved by solving a weighted least squares problem. Thus, instead of minimizing the single k-th order statistics of the squared residuals (as in LkOS estimators), this estimator minimizes a smoothed window of the residuals around the k-th order statistics of the squared residuals. The closed mathematical form of HBM and its guaranteed stability (theoretically supported by stability properties of redescending M-estimators) combined with its high breakdown point (evidenced by LkOS and ALKS estimators) and its fast convergence speed make this estimator an excellent choice for solving the problem of segmenting of multi-structural data. A number of experiments, using both synthetic and real data have been conducted to benchmark the performance of the proposed estimator. The computational time of HBM, MSSE, ASSC and PbM are compared using the same computing platforms (CPU, memory, software, etc.) and the results show that HBM outperforms aforementioned techniques. Acknowledgement This research was supported by the Australian Research Council and Pacifica Group Technologies (PGT) through the ARC Linkage Project grant LP0561923. References [1] A. Bab-Hadiashar and D. Suter. Robust segmentation of visual data using ranked unbiased scale estimator. ROBOTICA, 17:649–660, 1999. 1, 4, 5 [2] H. Chen and P. Meer. Robust regression with Projection based M-estimators. In Proceedings of the Ninth IEEE International Conference on Computer Vision (ICCV’03), pages 878–885, Nice, France, 2003. 1, 2, 3 [3] M. Fischler and R. Bolles. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Comm. Assoc. Comp. Mach., 24(6):381–395, 1981. 1 [4] R. Hoseinnezhad and A. Bab-Hadiashar. High breakdown m-estimator: A fast robust estimator for computer vision applications. Technical report, Swinburne University of Technology, Victoria, Australia, July 2007. 5 [5] R. Hoseinnezhad, A. Bab-Hadiashar, and D. Suter. Finite sample bias of robust scale estimators in computer vision problems. In G. B. et al., editor, Lecture Notes on Computer Science (LNCS), No. 4291 (International Symposium on Visual Computing - ISVC’06), pages 445–454, Lake Tahoe, Nevada, USA, November 2006. Springer. 4 [6] K. Lee, P. Meer, and R. Park. Robust adaptive segmentation of range images. IEEE Trans. PAMI, 20(2):200–205, 1998. 1 [7] P. Meer. Robust techniques for computer vision. In G. Medioni and S. Kang, editors, Emerging Topics in Computer Vision, chapter 3, pages 107–190. Prentice Hall, 2004. 1, 2, 3 [8] R. Subbarao and P. Meer. Heteroscedastic Projection based M-estimators. In Workshop on Empirical Evaluation Methods in Computer Vision (in conjunction with CVPR’05), pages 38–44, San Diego, CA, 2005. 1, 3 [9] R. Subbarao and P. Meer. Beyond RANSAC: User independent robust regression. In Workshop on 25 Years of RANSAC (in conjunction with CVPR’06), pages 101–108, New York, NY, 2006. 1, 2, 3, 4 [10] R. Subbarao and P. Meer. Subspace estimation using Projection based M-estimators over Grassman manifolds. In A. P. Ales Leonardis, Horst Bischof, editor, 9th European Conference on Computer Vision - ECCV’06, pages 301–312, Graz, Austria, May 2006. Springer. 2, 3, 4 [11] B. Tordoff and D. Murray. Guided sampling and consensus for motion estimation. In 7th European Conference on Computer Vision - ECCV’02, pages 82–69, Copenhagen, Denmark, May 2002. 2 [12] P. Torr and C. Davidson. IMPSAC: synthesis of importance sampling and random sample consensus. IEEE Transactions on Pattern Analysis and Machine Intelligence, 25(3):354– 364, 2003. 2 [13] H. Wang and D. Suter. Robust adaptive-scale parametric model estimation for computer vision. IEEE Trans. PAMI, 26(11):1459–1474, 2004. 1, 5 [14] X. Yu, T. Bui, and A. Krzyzak. Robust estimation for range image segmentation and reconstruction. IEEE Trans. PAMI, 16(5):530–538, 1994. 1