Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
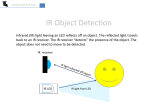
The Balls-in-Tubes Experiment Alvaro E. Gil, Nicanor Quijano, and Kevin M. Passino Dept. Electrical and Computer Engineering The Ohio State University 2015 Neil Avenue, Columbus, OH 43210 April 5, 2004 Abstract This document provides a general guide for students who want to implement real-time control strategies for the balls-in-tubes experiment. This inexpensive experiment is designed to be a testbed for the implementation and evaluation of distributed dynamic resource allocation strategies. In this document, we describe the apparatus, its main components, the challenges that we need to face, and we show how to interface dSPACE with the experiment. Contents 1 Introduction 2 2 dSPACE: Hardware and Software 2 3 Experimental Apparatus 3.1 Height Sensors . . . . 3.2 Actuators . . . . . . . 3.3 Electrical Connections 3.4 Power Supply . . . . . 3.5 Simulink Blocks . . . . 3.5.1 Height Sensors 3.5.2 Actuators . . . 3.5.3 Controllers . . and . . . . . . . . . . . . . . . . . . . . . . . . Challenges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 4 5 6 6 6 6 8 9 1 Introduction The ubiquitous presence of networked computing is significantly impacting the field of control systems. There are already many “distributed control systems” (DCS) in industry and significant current research on networked multi-agent systems. These networked control systems are typically decentralized, large-scale, may be hierarchical, and are often quite complicated from a dynamical systems perspective. They typically have a blend of significant nonlinearities, nondeterministic behavior, random delays, constrained information flow (e.g., only via the topology defined by the communication network), high-dimensionality, etc. Since their main purpose is control of a dynamical system they contain many (if not all) of the challenges typically found in control systems (e.g., disturbance rejection, tracking, robustness), and additional challenges due to the presence of a computer network that synergistically interacts with the dynamical system. They represent a significant departure from typical, say classical DC motor control or inverted pendulum control problems, and demand many of the same tools/skills and more such as expertise in software engineering, object-oriented programming, or real-time operating systems. Moreover, they demand that more attention be given to a number of other nontraditional control objectives, including dynamic resource allocation, scheduling of tasks, and control over large networks, than in the past. The balls-in-tubes experiment was designed to provide a testbed for distributed networked feedback control systems. Compared to past experiments, it provides interesting challenges to perform dynamic resource allocation. 2 dSPACE: Hardware and Software We use dSPACE hardware and software for the balls-in-tubes experiment experiment described in this document. The dSPACE software is based on Matlab/Simulink. To develop the block diagrams in Simulink for the balls-in-tubes experiment we use several processes. First, we will acquire the data, and store this information in some global variables that will be used in the next process. Second, we develop several subsystems (i.e., the name used in Simulink to designate each of the elements that a complex block diagram has to make everything more compact and easy to read) that will be in charge of making decisions concerning the control, or other tasks such as to update variables to be used in the last process. Third, we will update the digital/analog outputs. In the combined dSPACE-Matlab package we have Simulink and the graphical user interface (GUI) that is provided in dSPACE. In Simulink we develop the controller and all the necessary functions to run the experiment. Once we have the code, that they call the “model,” we compile it and following some steps that are transparent to the user, we obtain a file that will run the code in real time, and provide the ability to set up a user interface. This GUI in dSPACE can be viewed as a diagnostic tool, since we can change some variables, and we can see in real time some of the variables defined by the user in the model. The students can find a tutorial introduction to dSPACE at http://www.ece.osu.edu/˜passino/dSPACEtutorial.doc.pdf. 3 Experimental Apparatus and Challenges This experiment was designed to be an inexpensive testbed for dynamic resource allocation strategies. Below, we describe the elements of the experiment, its challenges, and we show how to interface both the sensors and actuators to the dSPACE card. Figure 1 shows the balls-in-tubes experiment. There are four tubes, each of which holds a ball inside, a fan at the bottom to lift the ball, and a sensor at the top to sense the ball’s height. For each tube there is a box that the 2 fan pressurizes. You can think of this box as a stiff balloon that is “blown up” by the fan, but which has an outlet hole used to blow air into the tube. The tubes are connected at the fan inlets via an input manifold which has an inlet at the bottom as indicated. Also, there is an output manifold at the top of the tubes with an outlet as shown. The presence of the manifolds is a key part of the experiment. These manifolds force the sharing of air at the input, or constrain its flow at the output, so that there is significant coupling between the four tubes. Characteristics of the coupling can be adjusted by, for instance, making both the inlet and outlet have different opening sizes or by placing solid objects in the manifold to obstruct airflow to some fans. For a range of inlet sizes, if one fan succeeds at lifting the ball to near the top, it can only do this at the expense of other balls dropping. This feature leads to the need for “resource allocation” where here the resource is the air that elevates the balls. Flow characteristics in the manifolds are very complicated due to, for instance, air turbulence in the manifolds and pressurized box. Finally, note that the experiment was designed to be easily extended to more tubes, different arrangement patterns, and to have different manifolds and hence interaction effects. There are a number of control objectives 465 mm Close-up view of output manifold Output manifold outlet 1710 mm Ball 1 Tube 1 Ultrasonic sensor 3 DC fan 4 Input manifold Close-up view inlet of input manifold 470 mm Pressurized box 1 Figure 1: Balls-in-tubes experiment (tubes 1-4, numbered left to right). and challenges that can be studied for this experiment, beyond the obvious isolated balancing of a 3 single ball in a tube: 1. Balancing the balls inside the tubes, trying to allocate air pressure to keep all the balls at fixed positions or alternatively, a uniform height but maximally elevated. 2. Balancing and reallocation dynamics in the presence of disturbances such as changes in manifold inlet sizes or flow obstructions in a manifold. Also, effects of using decentralized and networked decision making in the presence of an imperfect communication network could be studied. The actuators that we selected are DC fans commonly found inside computers. In total, there is one digital input (DI) and one digital output (DO) for each sensor, and one digital output for each fan for a total of 12 digital input-output lines that we connect to a DS1104 dSPACE card. 3.1 Height Sensors To sense the ball height for each tube we use a Devantech SRF04 ultrasonic sensor shown in Figure 2(a). Figure 2(b) depicts the sensor connections. Table 1 shows the specifications of the Devantech SRF04 sensor (http://www.robot-electronics.co.uk/htm/srf04tech.htm). The raw data obtained from the sensor is very noisy. For example, the spikes that we get from it correspond to errors greater than 10 centimeters. We developed a filter to smooth the sensor output. For our sampling rate Ts = 100µ sec., after filtering we achieved a resolution of ± 1 centimeter. The a. Devantech SRF04 Ultrasonic sensor b. Sensor connections Figure 2: Ultrasonic sensor used in the balls-in-tubes experiment. ultrasonic sensor timing diagram is shown in Figure 3. There are two digital signals (one DI and one DO) needed to obtain raw data from this sensor, which is the travel time of the ultrasound wave between the sensor and the ball. The DO is connected to the trigger input to start the ball height measurement. After the application of a signal to the trigger input, the sensor will send out an 8 cycle sonic burst at 40kHz and set its echo line high. It then waits for an echo, and when it detects it, the echo line is reset. The pulse width of the echo line is therefore proportional to the ball height and it is connected to a dSPACE DI. 4 Table 1: Specifications of the ultrasonic sensor. Voltage (DC) Current Frequency Maximum Range Minimum Range Weight Size 5v 30mA Typ. 50mA Max 40KHz 3m 3 cm 0.4 oz. 1.75” w x 0.625” h x 0.5” d Figure 3: Timing diagram of the ultrasonic sensor. 3.2 Actuators The actuators that we selected are Dynatron DF1209BB DC fans (Figure 4) commonly found inside computers and their specifications are shown in Table 2. We use a pulse width modulation (PWM) signal as an input to the fan. The sampling period is 100 µsec. the period for the PWM is 0.01 sec., and the duty cycle is varied in order to command the ball inside the tube either to reach a desired height or to raise as much as possible during a certain time interval. One limitation present in the actuators is that they possess an internal temperature sensor that changes the revolutions per minute (rpm) of the fan when the ambient temperature changes; this fact makes the rpm of the fan temperature-dependent. For single runs of the experiment this is not a problem since the room temperature is relatively constant in such a short time interval. Another more significant problem is that the fans are of relatively low bandwidth. Table 2: Specifications of the Dynatron DF1209BB DC fan. Voltage (DC) Range Voltage (DC) Max Current Operating Temperature Weight Size 12v 10.2-13.8v 300mA -10C to + 65C 80 gm 92mm w x 92mm h x 25.4mm d 5 Figure 4: Fan used in the balls-in-tubes experiment. 3.3 Electrical Connections Here we show all the electrical connections in this experiment. Figure 5 shows a side view of the apparatus where you can see all the terminal blocks. There are two terminal blocks (i.e., TOP-1 and TOP-2) on the output manifold, three terminal blocks (i.e., BOT-1, BOT-2, and BOT-3) on the input manifold, and one terminal block on the pressurized block. Figures 6, 7, and 8 show detailed information on all the connections found in the output manifold, pressurized block, and the input manifold respectively. The nomenclature used in this case lists first where the connection comes/goes from/to, and second also lists the terminal block in parenthesis (if applicable) associated with this connection. 3.4 Power Supply Two power supplies are used in the balls-in-tubes experiment. A 15 DC volt power supply is used to power all the fans. This power supply was designed by undergraduates in an EE 682P design project. You must use one 15 DC voltage source for powering just one fan; otherwise, an overload could occur causing a malfunctioning in the fans. The other one is a 5 DC voltage power supply Tektronix CPS250, which powers all the ultrasonic sensors. 3.5 Simulink Blocks Here we explain the Simulink blocks that the students need to interface to the height sensors and the actuators. Next, we describe these key blocks in more detail. 3.5.1 Height Sensors The height of the ball inside the tube is determined by means of the Simulink blocks shown in Figure 9. Notice that the logic implemented here corresponds to the specifications of the timing diagram depicted in Figure 3. The block “Pulse Generator” sends out a signal with amplitude 1, frequency 0.05 s, and duty cycle 0.02 to the trigger input of the sensor. All these values were 6 TOP-1 TOP-2 Multipair cable Tube # 1 MID BOT-3 BOT-2 BOT-1 Figure 5: Side view of the terminal blocks in the balls-in-tubes experiment. determined from the timing diagram of the ultrasonic sensor. The block “EchoLine” is the digital input used for the echo line of the ultrasonic sensor. The travel time of the sound wave is the difference between the negative edges of the trigger input signal and the echo line of the ultrasonic sensor. We then use this travel time divided by two and the sound velocity (i.e., 331.1 m s ) to obtain the height of the ball. The block “Discard Values” avoids having negative values at the variable “Travel time of sound wave” at every time. We have to cope with three limitations presented by this sensor: changes of the sound velocity with respect to the ambient temperature, the sensor noise, and the resolution of the sensor. If the temperature in the laboratory changes, then the absolute value of the ultrasonic sensor changes also, which makes the height measurement temperature-dependent. The raw data obtained from the sensor is very noisy so we have to filter these data in order to reject undesirable values. We consider that a signal is “noisy” here when the difference between two consecutive ultrasonic sensor readings is greater than 10 centimeters. Hence we have two variables: the actual measurement that could be corrupted, and the filtered measurement. If the measurement does not have noise, we update the second variable (i.e., we assign the same value that the actual measurement has), otherwise we will not, and the value will be the same as the previous iteration. The resolution of the sensor depends on the sampling time used in the experiment. In this particular case, we chose 7 S1: Sensor 1 S2: Sensor 2 S3: Sensor 3 S4: Sensor 4 TOP-1 From Echo S2 From Trigger S2 From Gnd S2 From +5V S2 From Echo S1 From Trigger S1 From Gnd S1 From +5V S1 1 3 5 7 9 11 13 15 17 19 21 23 2 4 6 8 10 12 14 16 18 20 22 24 To To To To To To To To Pin 47 Pin 45 Pin 43 Pin 41 Pin 39 Pin 37 Pin 35 Pin 33 (BOT-1) (BOT-1) (BOT-1)(BOT-1) (BOT-1) (BOT-1) (BOT-1) (BOT-1) From +5V S3 From Gnd S3 25 27 29 26 28 30 From +5V S4 From Gnd S4 From Trigger S4 From Echo S4 31 33 35 37 39 32 34 36 38 40 From From Trigger Echo S3 S3 TOP-2 To To To To To To To To Pin 24 Pin 22 Pin 20 Pin 18 Pin 55 Pin 53 Pin 51 Pin 49 (BOT-2) (BOT-2) (BOT-2) (BOT-2) (BOT-1) (BOT-1) (BOT-1) (BOT-1) Figure 6: Electrical connections at the terminal blocks in the output manifold. MID To Pin 26 (BOT-2) To Pin 28 (BOT-2) To Pin 30 (BOT-2) To Pin 32 (BOT-2) Ground 1 2 3 4 5 6 7 9 INA INB INC IND INE INF ING OUTA OUTB OUTC OUTD OUTE OUTF OUTG 16 15 14 13 12 11 10 From Pin 10 (BOT-3) From Pin 12 (BOT-3) From Pin 14 (BOT-3) From Pin 16 (BOT-3) COM DS2003 Figure 7: Electrical connections at the terminal block in the pressurized box. a sampling time Ts = 100µsec. and achieved a resolution of the sensor equal to ±1 centimeter. 3.5.2 Actuators The actuators are used to supply the air needed to lift the ball inside the tube. The amount of air supplied for lifting a ball is proportional to the voltage applied to the fan, which is proportional to the duty cycle of the PWM signal. Figure 10 shows the blocks necessary to generate a PWM signal. What you need to do here is to assign a value between 0 and 1 (representing from 0 to 100 % duty cycle) to the memory block “A1” depending on the voltage that you want to apply to a fan. This duty cycle value will depend on the controller design that you will use for the ball-in-tubes experiment. 8 BOT-3 BOT-2 From Power IO 5 Supply P1B 44 +15 Vdc dSPACE From Power IO 11 Supply P1B 43 +15 Vdc dSPACE From Power Ground Supply and +15 Vdc P1B 1 dSPACE From Power Supply +5 Vdc +15 Vdc From Pin 24 (TOP-1) From Pin 22 (TOP-1) 33 34 35 36 From Pin 20 (TOP-1) 37 38 IO 5 P1A 44 dSPACE 24 From Pin 26 (TOP-2) From Pin 18 (TOP-1) 39 40 IO 11 P1A 43 dSPACE 25 26 42 28 From Pin 16 (TOP-1) From Pin 14 (TOP-1) 41 27 From Pin 1 (MID) From Pin 2 (MID) 43 44 30 From Pin 3 (MID) From Pin 12 (TOP-1) 45 46 32 From Pin 5 (MID) From Pin 10 (TOP-1) From Pin 40 (TOP-2) From Pin 38 (TOP-2) From Pin 36 (TOP-2) From Pin 34 (TOP-2) 47 48 49 50 51 52 53 54 55 56 1 2 3 4 To Red wire (FAN-3) 5 6 To Red wire (FAN-4) 7 8 To Black wire (FAN-4) To Black wire (FAN-3) 9 10 From Pin 16 (MID) 11 12 From Pin 15 (MID) IO 19 P1B 9 dSPACE IO 13 P1B 10 dSPACE 29 31 To Black wire (FAN-2) To Black wire (FAN-1) 13 14 From Pin 14 (MID) IO 7 P1B 11 dSPACE 15 16 From Pin 12 (MID) IO 1 P1B 12 dSPACE BOT-1 From Pin 32 (TOP-2) From Pin 30 (TOP-2) From Pin 28 (TOP-2) To Red wire (FAN-1) To Red wire (FAN-2) 17 18 19 20 21 22 23 +5 Vdc Ground +5 Vdc Ground IO 0 P1A 12 dSPACE IO 7 P1A 11 dSPACE IO 13 P1A 10 dSPACE IO 19 P1A 9 dSPACE Power Supply (Ground) and P1A 1 dSPACE Power Supply (+5 Vdc) Figure 8: Electrical connections at the terminal blocks in the input manifold. (boolean) Pulse Generator TriggerInput DS1104BIT_OUT_C4 Data Type Conversion In1 Clock Out1 In1 Out1 Discard Values Negative Edge of TriggerInput Travel time of sound wave EchoLine Ball height 165 DS1104BIT_IN_C10 Conversion Factor In1 medida1 Data Store Write1 Out1 Negative Edge of EchoLine Figure 9: Simulink blocks used to determine the ball height. 3.5.3 Controllers Two control strategies will be discussed here to give you an idea of how controllers operate for this plant. First, a conventional controller can be designed to float the ball inside each tube at a desired height. For this case, you need to define for each tube a variable in Simulink for the desired height, take the difference between the desired height and the actual one, and this value will be the input to the designed controller. Other additional inputs can be considered depending on whether you want to design a proportional-integral or proportional-integral-derivative controller. Second, you can try to balance the balls around a certain common height. In this case, the peak-to-peak oscillations of each ball height are allowed to be relatively large, but we want the time averages of 9 < A1 Duty Cycle Product2 1/100 Period 1 u Frequency 1 0 floor Product1 prevent missing an entire pulse period 0 (boolean) PWM Fan1 1 Out1 Product Figure 10: Simulink blocks used to generate a PWM signal. the heights of each of the four balls to be the same. This goal can be achieved by allowing only one fan enough percentage of PWM duty cycle to raise its ball at a time; hence we think of this as juggling the balls. Such juggling is a type of allocation of the air resource from the common input manifold to each ball. The allocation strategy must be designed to persistently seek to minimize the differences between the average ball heights in spite of air turbulence, inter-tube coupling via the manifolds, fan bandwidth constraints, and significant sensor noise. The dynamics of allocation rely critically on feedback information on ball heights, and the distributed decision-making that implements the allocation strategy. For the details of the design and operation of two resource allocation strategies for this experiment see [1]. References [1] N. Quijano, A. E. Gil, and K. M. Passino, “Experiments for decentralized and networked dynamic resource allocation, scheduling, and control,” Submitted to IEEE Control Systems Magazine, 2003. 10