Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Heat transfer physics wikipedia , lookup
Tunable metamaterial wikipedia , lookup
Nanochemistry wikipedia , lookup
Low-energy electron diffraction wikipedia , lookup
Surface tension wikipedia , lookup
Nanogenerator wikipedia , lookup
Dislocation wikipedia , lookup
Sessile drop technique wikipedia , lookup
Fatigue (material) wikipedia , lookup
Sol–gel process wikipedia , lookup
Finite strain theory wikipedia , lookup
TaskForceMajella wikipedia , lookup
Viscoplasticity wikipedia , lookup
Paleostress inversion wikipedia , lookup
Structural integrity and failure wikipedia , lookup
Spinodal decomposition wikipedia , lookup
Work (thermodynamics) wikipedia , lookup
Energy applications of nanotechnology wikipedia , lookup
Strengthening mechanisms of materials wikipedia , lookup
Viscoelasticity wikipedia , lookup
Fracture mechanics wikipedia , lookup
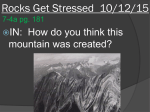
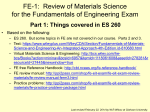
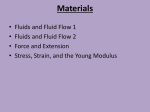
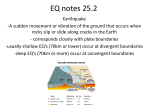
STRAIN CHARACTERISTICS OF MATERIALS FRACTURE UNDER LOW-CYCLE PLASTIC DEFORMATION A. Khromov, D. Fedorchenko1, E. Kocherov2, A. Bukhanko Samara State Aerospace University named after S.P. Korolyov 34, Moskovskoe shosse, Samara, SU-443086, Russia; [email protected], [email protected] 1 Kuznetsov Samara Research und Engineering complex 2 Samara Machine – Building Design Bureau ABSTRACT Plastic fracture of materials under quasistatic deformation processes is characterized by deformation and energy fracture criteria. At the same time such criteria are tightly bound among themselves as any process of plastic deformation is connected with energy dissipation. The basic problem will consist in separation of the deformation and energy parameters independent from each other which characterizes tendency of the material to fracture. Principles of the theory development of rigid-plastic body excluding nonuniqueness of plastic flow developed by authors are incorporated in the basis of the suggested approach. These principles are based on sequential application of nonequilibrium thermodynamics principles. 1. Introduction One of features of the theory of ideal rigid-plastic body is the possibility of the description of finite strain tensor fields in neighborhood of zones of discontinuity of body shape (angular point of notch, crack tip, etc.), [1]. These regions are strain concentrators and, as a rule, fracture sources. Therefore the formulation of strain criteria of fracture is actual problem. The present approach is formulated in papers [2-8]. Below generalization of this approach is offered with the formulation of fracture criterion including both the strain state of material particles, and the specific energy dissipation accomplished by the particle. Below generalization of this approach is offered with the formulation of fracture criterion including both the strain state of material particles, and the specific energy dissipation accomplished by the particle. Necessity of such criteria arises in the description of fracture processes on conditions of composite deformation, in particular, under cyclic change of plastic strains. The basic problem of the formulation of fracture criterion (including deformation states and energy dissipation on plastic deformation) is their communication which depends on the formulation of plasticity condition and a particle deformation path. 2. Determination of the strain fields As a measure of strains we take finite strain tensors of Cauchy Cij and Almansi E ij : C ij = H ki H kj , Eij = where H ij = ∂X i ∂x j ( ) 1 δ ij − Cij , i , j = 1,2,3 2 (1) , X i and x i are Lagrangian and Eulerian coordinates of a material particle, respectively. Associated law of plastic flow is ε ij = λ ∂f , ∂σ ij ( λ > 0, i , j = 1,2,3 (2) ) 1 ε ij = Vi , j + V j ,i , 2 ( where f σ ij , E ij ) − loading function, σ ij − stress tensor, ε ij − velocity strain tensor, Vi − the vector of displacement velocity. We consider the rigid-plastic body on plasticity condition, to satisfying incompressibility condition, Bykovcev et al [1]. The relationship between tensors E ij and ε ij is DE ij Dt = ∂E ij ∂t + ∂E ij ∂x k Vk + E ik ∂Vk ∂Vk + E jk = ε ij . ∂x j ∂x i PDF created with pdfFactory Pro trial version www.pdffactory.com (3) 3. Deformation states of incompressibility rigid-plastic body The incompressibility condition ε 1 + ε 2 + ε 3 = 0; or C1C 2C 3 = 1, C1 > 0, C 2 > 0, C 3 > 0; (4) or (1 − 2E1 )(1 − 2E 2 )(1 − 2E 3 ) = 1, determines in space E i a hyperbolic surface of the third order , fig. 1. The point O represents the initial strainless state. In figure the projection of the surface onto deviator plane with a normal line n is submitted (fig. 2). Here projections of intersection lines of the surface coordinate origin: with the plane which is parallel to deviator plane located on distance h h = (E1 + E 2 + E 3 ), (1 − 2E1 )(1 − 2E 2 )(1 − 2E 3 ) = 1 . Figure 1. Deformation states surface of incompressibility rigid-plastic body Figure 2. Level line of deformation states surface PDF created with pdfFactory Pro trial version www.pdffactory.com 3 prior to the (5) 4. Simple deformation processes We consider velocities field of kind V1 = x1ε 1 (t ), V2 = x 2 ε 21 (t ), V3 = x 3 ε 3 (t ), (6) where ε i (t ) − principal values of velocity strain tensor, which are functions of time t . In athermic plasticity theories the time scale is not determined and can change during deformation. In particular, from three functions ε i (t ) it is possible to set one function at will, for example, ε 1(t ) ≡ 1 . In this case from (4) follows, that ε 1(t ) = 1, ε 2 (t ) = −1 − ε 3 (t ) . (7) I.e. only one function ε 3 (t ) defines simple deformation process in space E i . If deformation process begins from strainless state (point O, fig.1,2) then the system of the equations (4) under condition (6) and initial conditions E ij t =0 = 0 has the solution: Ei = ( ) 1 1 − eτ i ( t ) , i = 1,2,3 2 (8) t ∫ E12 =E 13 = E 23 ≡ 0, τ i (t ) = −2 ε i (t )dt . 0 5. Orthogonal deformation processes We shall represent simple deformation processes by curves l on deviator plane (fig. 2). As process parameter (time) we shall choose value h = E1 + E 2 + E 3 , E i = E i (h ) . If in the equation (8) to replace t with h , then ( ) h ∫ 1 h = 3 − eτ 1( h ) − eτ 2 ( h ) − eτ 3 ( h ) , τ i = −2 ε i (h )dh . 2 (9) 0 For simple deformation processes principal directions of velocity strain tensor are orthogonal to projections of lines (5) on deviator plane which are level lines for function h = E1 + E 2 + E 3 . For other processes the values εi are connected by relationships: ε 1 + ε 2 + ε 3 = 0, ε 1(1 − 2E1 ) + ε 2 (1 − 2E 2 ) + ε 3 (1 − 2E 3 ) = 1, (10) ε 1(1 − 2E1 )(E 2 − E 3 ) + ε 2 (1 − 2E 2 )(E 3 − E1 ) + ε 3 (1 − 2E 3 )(E1 − E 2 ) = 0. Here the first equation defines incompressibility, the second equation follows from (9) after its differentiation by time h, the third equation follows from a orthogonality condition of deformation process to projections of lines (5) on deviator plane. If we shall introduce new process parameter t then carrying out change of variable h = h(t ) within (9) and differentiating by t, we shall have the equation ε1 (1 − 2E1 )h′ + ε 2 (1 − 2E 2 )h′ + ε 3 (1 − 2E 3 )h′ = 1. h′ h′ h′ (11) If strain and stress are connected to function h(t ) relationships σ i = (1 − 2E i )h ′ , ε i* = εi , then the equations (10) will h′ become PDF created with pdfFactory Pro trial version www.pdffactory.com ε 1* + ε 2* + ε 3* = 0, ε 1*σ 1 + ε 2*σ 2 + ε 3*σ 3 = 1, (12) ε 1*σ 1(σ 2 − σ 3 ) + ε 2*σ 2 (σ 3 − σ 1 ) + ε 3*σ 3 (σ 1 − σ 2 ) = 0. The equations (12) define a cylindrical loading surface with directional line on deviator plane conterminous to projections of lines (5) and generatrix parallel to n with hardening parameter. The first and third equations follow from the associated flow law (2) for all deformation processes of incompressible rigid-plastic bodies. The second equation (12) will be determined for all deformation processes if for process parameter to accept energy dissipation. The loading surface has the following properties: the particle performs same specific energy dissipation D0 = ∫ ε σ dl i i under a material l deformation by any simple deformation process of a datum point of strainless state up to strain level h = E1 + E 2 + E 3 ; under the deformation, distinct from simple deformation process, it is required greater energy dissipation. For any structural material the loading surface can be determined from standard experiment for uniaxial tension throughout dependence of yield point from parameter h ( σ T = σ T (h) ). 6. Loading surface related with level lines of strain surface We shall determine the equations (5) in components Cauchy’s tensor H= 1 3 (C1 + C2 + C3 ), C1C 2C 3 = 1, C i = 1 − 2E i , (13) and we shall insert new coordinate system which is connected with deviator plane and a normal line to it by transformation H= x=− 1 2 C 1+ 1 2 1 3 C1 + 1 3 y =− C2 , C2 + 1 6 On deviator planes the equations (13) define level lines for function 1 3 C1 − C3 , 1 6 C2 + 2 6 C 3. H: 2 x 3 − 6 xy 2 − 3 2Hx 2 − 3 2Hy 2 + 2 2H 3 − 6 6 = 0 (14) or in polar coordinates x = ρ cos ϕ, y = ρ sin ϕ : 2 ρ 3 cos 3ϕ − 3 2Hρ 2 + 2 2H 3 − 6 6 = 0 . The equations (14) and (15) determine the cylindrical loading surface as f (σ 1 − σ 2 , σ 2 − σ 3 , H ) = 0 , where x= −1 2h′ (σ 1 − σ 2 ), H= −2 3 y =− 1 3 x− 2 6h′ (σ 2 − σ 3 ), (E1 + E 2 + E3 ) + 3 . PDF created with pdfFactory Pro trial version www.pdffactory.com (15) Figure 3. Loading curve related with level lines On fig. 3 curves (14) and (15) are submitted for distinctive values Н which show, that at small values Н they do not differ almost from circumference. The curve 1 – for H = 3 + 10 −5 , the curve 2 – for H = 3 + 0.5 , the curve 3 – for H = 3 + 1.5 . Yield point for tension and compression become essentially the distinctive at increase Н. In fig. 4 the by a plane passing through an axis C1 and normal line n , which characterizes relationships of yield section of surface points for tension and compression ( σ TP , σ TC ) is submitted. It is possible to show, that lim σ TP H →∞ σ C T = 2 , lim H→ 3 σ TP σ TC = 1. Figure 4. Section of deformation states surface by plane of the symmetry passing through an axis C1 and normal line n 7. Fracture conditions Standard experimental researches (for tension of plane, cylindrical samples) show, that materials fracture occur under the certain deformations E i* , and permit to define the minimal system of points on a surface , approximated by some critical line. It is known, what even under small cyclically changeable plastic deformations there is the fracture of all materials practically that is connected first of all with energy dissipation D = ∫ ε σ dt . Therefore the equation of critical ij ij curve can be as Ф (E1, E 2 , E 3 , D ) = 0, (1 − 2E1 )(1 − 2E 2 )(1 − 2E 3 ) = 1. PDF created with pdfFactory Pro trial version www.pdffactory.com (16) It is postulated, that when a curve corresponding to deformation process, crosses a critical line, there is a fracture of a material. Position of critical curve (5) can be determined for each structural material experimentally. If to assume, that stress-strain properties of material correspond to loading surface of item 6, both the second and the third invariant of Almansi's strain tensor a little influence for fracture of material then the equations of critical line (16) can be as E1 + E 2 + E 3 = h(D ), (1 − 2E1 )(1 − 2E 2 )(1 − 2E 3 ) = 1. (17) The critical line (17) coincides with line of the greatest possible hardening of the material, the determined value hmax = h(D0max ) , where D0 is the energy dissipation under orthogonal deformation process. In this connection it is supposed, that additional energy dissipation, producible by the material volume element under nonorthogonal deformation reduces the material ability to ultimate hardening. The equations (16), (17) imply that the critical level line determining the fracture point of each particle, verge towards strainless state during plastic deformation according to energy dissipation. Function h(D ) should be determined experimentally. References [1] Bykovcev, G.I., & Ivlev, D.D., Plasticity Theory, Vladivostok, Russia, 1998. [2] Khromov, A.I., Localization of plastic strains and fracture of ideal rigid-plastic bodies. Doklady Physics, 43(9), pp. 202–205, 1998. [3] Kozlova, O.V. & Khromov, A.I., Fracture constants for ideal rigid-plastic bodies. Doklady Physics, 47(7), pp. 548–551, 2002. [4] Khromov, A.I., Bukhanko, A.A. & Stepanov, A.L., Strain Raisers. Doklady Physics, 51(4), pp. 223–226, 2006. [5] Khromov, A.I. Fracture of rigid-plastic bodies, fracture constants. Izv. RAS Mech. Solid, 3, pp. 137–152, 2005. [6] Khromov, A.I., Deformation and fracture of rigid-plastic bar pulled tension, Izv. RAS Mech. Solid, 1, pp. 136–142, 2002. [7] Khromov, A.I., Bukhanko, A.A., Kozlova, O.V. & Stepanov, A.L., Plastic Constants of Fracture. J. Appl. Mech. and Techn. Phys. 47(2), pp. 274-281, 2006. [8] Khromov, A.I., Kozlova, O.V., Fracture of Rigid-plastic Bodies. Fracture Constants, Vladivostok, Russia, 2005. PDF created with pdfFactory Pro trial version www.pdffactory.com