Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Power inverter wikipedia , lookup
Solar micro-inverter wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Wireless power transfer wikipedia , lookup
Standby power wikipedia , lookup
Distributed control system wikipedia , lookup
History of electric power transmission wikipedia , lookup
Mains electricity wikipedia , lookup
Electrification wikipedia , lookup
Alternating current wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Resilient control systems wikipedia , lookup
Amtrak's 25 Hz traction power system wikipedia , lookup
Electric power system wikipedia , lookup
Audio power wikipedia , lookup
Control theory wikipedia , lookup
Power electronics wikipedia , lookup
Distribution management system wikipedia , lookup
Power over Ethernet wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Rectiverter wikipedia , lookup
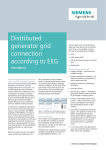
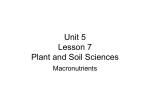
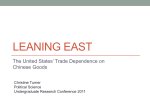
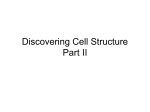
Design of Power System Stabilizer using Power Rate Reaching Law based Sliding Mode Control Technique Vitthal Bandal, Student Member, IEEE, B. Bandyopadhyay, Member, IEEE, and A. M. Kulkarni, Gp (s) Ks ωB Tw T1 , T2 , T3 , T4 Gf (s) Eq Td xd xd Ef d δ ω Sm Sm0 id H D KE TE xe Pg0 Pe xq Vref Vs A B C x y t u T s LIST OF SYMBOLS generic power system stabilizer transfer function stabilizer gain system base frequency ( 377 rad/sec at 60 Hz) washout time constant lead/lag time constant filtering in stabilizer voltage proportional to the field flux linkages of machine d-axis transient open circuit time constant d-axis synchronous reactance of machine d-axis transient reactance of machine generator field voltage machine shaft angular displacement (degree) rotor speed ( rad./sec.) machine slip nominal slip of the machine direct axis armature current (pu) inertia constant(sec.) damping coefficient AVR gain AVR time constant(sec.) line reactance (pu) mechanical power on the shaft of machine electrical power output of machine q-axis synchronous reactance of machine reference input voltage correction voltage state (plant) matrix of the system control input matrix output matrix state vectors output vectors time stabilizing signal transpose switching function Abstract— The paper presents a new method for design of power system stabilizer (PSS) using discrete time power rate reaching law based sliding mode control technique. The control objective is to enhance the stability and to improve the dynamic response of a single machine infinite bus (SMIB) system, operating in different conditions. The control rules are constructed using discrete time power rate reaching law based sliding mode control. We apply this controller to design power system stabilizer for demonstrating the efficacy of the proposed approach. Vitthal Bandal is a Research Scholar with Systems and Control Engineering, Indian Institute of Technology Bombay, Mumbai-400076, INDIA (e-mail:[email protected]) Prof. B. Bandyopadhyay is with Systems and Control Engineering, Indian Institute of Technology Bombay, Mumbai-400076, INDIA (email:[email protected])(corresponding author) Prof. A. M. Kulkarni is with Electrical Engineering department, Indian Institute of Technology Bombay, Mumbai-400076, INDIA (email:[email protected]) I. I NTRODUCTION Power system stabilizer (PSS) units have long been regarded as an effective way to enhance the damping of electromechanical oscillations in power system [1]. The action of PSS is to extend the angular stability limits of a power system by providing supplemental damping to the oscillation of synchronous machine rotors through the generator excitation [2]. This damping is provided by an electric torque applied to the rotor that is in phase with the speed variation. Once the oscillations are damped, the thermal limits of the tie-lines in the system may then be approached. This supplementary signal is very useful during large power transfers and line outages [3]. Over the past four decades, various control methods have been proposed for PSS design to improve overall system performance. Among these, conventional PSS of the leadlag compensation type [1], [4], [5] have been adopted by most utility companies because of their simple structure, flexibility and ease of implementation. However, the performance of these stabilizers can be considerably degraded with the changes in the operating condition during normal operation. Since power systems are highly nonlinear, conventional fixed-parameter PSSs cannot cope with great changes in the operating conditions. There are two main approaches to stabilizing a power system over a wide range of operating conditions, namely adaptive control and robust control [6]. Adaptive control is based on the idea of continuously updating the controller parameters according to recent measurements. However, adaptive controllers have generally poor performance during the learning phase, unless they are properly initialized. Successful operating of adaptive controllers requires the measurements to satisfy strict persistent excitation conditions. Otherwise the adjustment of the controller’s parameters fails. Robust control provides an effective approach to dealing with uncertainties introduced by variations of operating conditions. Among many techniques available in the control literature, H∞ and variable structure have received considerable attention in the design of PSSs. The H∞ approach is applied by Chen [6] to PSS design for a single machine infinite bus system. The basic idea is to carry out a search over all possible operating points to obtain a frequency bound on the system transfer function. Then a controller is designed so that the worst-case frequency response of the closed loop system lies within prespecified frequency bounds. It is noted that the H∞ design requires an exhaustive search and results in a high order controller. On the other hand the Authorized licensed use limited to: INDIAN INSTITUTE OF TECHNOLOGY BOMBAY. Downloaded on December 4, 2008 at 04:01 from IEEE Xplore. Restrictions apply. variable structure control is designed to drive the system to a sliding surface on which the error decays to zero [7]. Perfect performance is achieved even if parameter uncertainties are present. However, such performance is obtained at the cost of high control activities (chattering) [8]. In this paper a PSS design for SMIB system using discrete time power rate reaching law based sliding mode control technique is proposed. In the sliding mode controller a switching surface is designed. When the sliding mode occurs, the system dynamic behaves as a robust state feedback control system. A discrete time power rate reaching law based sliding mode controller is investigated, which is used to minimize the chattering. Simulations results for single machine infinite bus (SMIB) system are presented to show the effectiveness of the proposed control strategy in damping the oscillation modes. The paper is organized as follows. Section II presents basics of power system stabilizer and power system analysis. Section III presents the review on multirate output feedback. Section IV presents discrete time power rate reaching law based sliding mode controller design; the same is used for PSS design of SMIB system as discussed in section V. Conclusions are drawn in Section VI. The controller is validated using non-linear model simulation. II. P OWER S YSTEM S TABILIZER A. Basic concept The basic function of a power system stabilizer is to extend stability limits by modulating generator excitation to provide damping to the oscillation of synchronous machine rotors relative to one another. The oscillations of concern typically occur in the frequency range of approximately 0.2 to 3.0 Hz, and insufficient damping of these oscillations may limit ability to transmit power. To provide damping, the stabilizer must produce a component of electrical torque, which is in phase with the speed changes. The implementation details differ, depending upon the stabilizer input signal employed. However, for any input signal, the transfer function of the stabilizer must compensate for the gain and phase of excitation system, the generator and the power system, which collectively determines the transfer function from the stabilizer output to the component of electrical torque which can be modulated via excitation system [4]. B. Classical Stabilizer implementation procedure Implementation of a power system stabilizer implies adjustment of its frequency characteristic and gain to produce the desired damping of the system oscillations in the frequency range of 0.2 to 3.0 Hz. The transfer function of a generic power system stabilizer may be expressed as Gp (s) = Ks Tw s (1 + sT1 ) (1 + sT3 ) Gf (s) (1 + Tw s) (1 + sT2 ) (1 + sT4 ) where Ks represents stabilizer gain and Gf (s) represents combined transfer function of torsional filter (if required) and input signal transducer. The stabilizer frequency characteristic is adjusted by varying the time constant Tw , T1 , T2 , T3 and T4 . A torsional filter may not be necessary with signals like power or delta-P-omega signal [9]. A power system stabilizer can be most effectively applied if it is tuned with an understanding of the associated power characteristics and the function to be performed by the stabilizer. Knowledge of the modes of power system oscillation to which the stabilizer is to provide damping establishes the range of frequencies over which the stabilizer must operate. Simple analytical models, such as that of a single machine infinite bus (SMIB) systems, can be useful in determining the frequencies of local mode oscillations during the planning stage of a new plant. It is also desirable to establish the weak power system conditions and associated loading for which stable operation is expected, as the adequacy of the power system stabilizer application will be determined under these performance conditions. Since the limiting gain of the some stabilizers, viz., those having input signal from speed or power, occurs with a strong transmission system, it is necessary to establish the strongest credible system as the “tuning condition” for these stabilizers. Experience suggest that designing a stabilizer for satisfactory operation with an external system reactance ranging from 20% to 80% on the unit rating will ensure robust performance [10]. C. Power System Analysis Analysis of practical power system involves the simultaneous solution of equations consisting of synchronous machines ,associated excitation system , prime movers, interconnecting transmission network, static and dynamic ( motor ) loads, and other devices such as HVDC converters, static var compensator. The dynamics of the machine rotor circuits, excitation systems, prime mover and other devices are represented by differential equations. This results in the complete system model consisting of large number of ordinary differential and algebraic equations [9]. 1) Generator Equations: The machine equations ( for jth machine ) are dEqj dt dδj dt dSmj dt = −1 [Eqj − (xdj − xdj )idj − Ef dj ], Td0j = ωB (Smj − Smj0 ), = (1) (2) −1 [Dj (Smj − Smj0 ) − Pmj + Pej ]. (3) 2H Model 1.0 is assumed for synchronous machines by neglecting the damper windings. In addition, the following assumptions are made for simplicity [11]. 1. The loads are represented by constant impedances. 2. Transients saliency is ignored by considering xq = xd . 3. Mechanical power is assumed to be constant. 4. Ef d is single time constant AVR. 2) State space model of power system (Machine model 1.0): The state space model of a SMIB power system, the block diagram of which is shown in Fig. 1 can be obtained Authorized licensed use limited to: INDIAN INSTITUTE OF TECHNOLOGY BOMBAY. Downloaded on December 4, 2008 at 04:01 from IEEE Xplore. Restrictions apply. K1 ∆ Te1 ∆Τm + ∆Sm − Σ ∆ Te2 IV. D ISCRETE T IME P OWER R ATE R EACHING L AW BASED S LIDING M ODE C ONTROL 1 2Hs ∆δ ωB s Consider a SISO plant described by a continuous time linear model K4 K2 ẋ y K5 ∆Εq _ K5 1 + s Td0 K3 Σ KE + ∆Εfd 1 + s TE ∆ vref _ Σ (6) Where x ∈ Rn , u ∈ R, y ∈ R and the matrices A, B and C are of appropriate dimensions. Let ( Φτ , Γτ , C) be the system given by Eqn.(6) sampled at sampling interval τ seconds and is represented as, + K6 Fig. 1. = Ax + Bu, = Cx. Block diagram of a Single Machine Infinite Bus (SMIB) system using generator, transformer, network and loadflow data as given below [11], . x= Ax + B (Vref + Vs ) , (4) y = Cx, (5) where x denotes the states of the machine and are given as x = [Sm , δ, Ef d , Eq ]. Similarly, y = Sm denotes the output equation of the machine and C is the output matrix.( C = [1, 0, 0, 0] ). Where Sm is machine slip and is given by, Sm = (ω − ωB ) , (ωB ) δ is machine shaft angular displacement in degrees, Ef d is generator field voltage in pu and Eq is voltage proportional to field flux linkages of machine in p.u. The elements of matrix A are dependent on the operating condition. III. R EVIEW O N M ULTIRATE O UTPUT F EEDBACK In the following, multirate output feedback is briefly reviewed. Multirate Output Feedback is the concept of sampling the control input and sensor output of a system at different rates. It was found that multirate output feedback can guarantee closed loop stability, a feature not assured by static output feedback [12] while retaining the structural simplicity of static output feedback. Much research has been performed in this field [13]–[17]. In multirate output feedback, the control input [15], [17] or the sensor output [16] is sampled at a faster rate than the other. In this paper, the term multirate output feedback is used to refer the situation wherein the system output is sampled at a faster rate as compared to the control input. It was found that state feedback based control laws of any structure may be realized by the use of multirate output feedback, by representing the system states in terms of the past control inputs and multirate sampled system output [18], [19]. x(k + 1) = Φτ x(k) + Γτ u(k), y(k) = Cx(k). (7) (8) In [20] a power rate reaching law approach for continuous time systems had been proposed. The discrete power rate reaching law can be directly obtained from the continuous power rate reaching law as, s(k + 1) − s(k) = −kτ |s(k)|α sgn(s(k)) (9) where τ > 0, is the sampling period, 0 < kτ < 1 and 0 < α < 1. s(k) is the switching function defined as a function of system states as, s(k) = cT x(k) (10) = cT x(k + 1) (11) Hence, s(k + 1) So, from Eqns. (7), (9) and (11) s(k + 1) − s(k) = cT [Φτ − I]x(k) + cT Γτ u(k) (12) Comparing the Eqns.(9) and (12), the control law is obtained as follows [21], u(k) = −(cT Γτ )−1 [cT Φδ x(k) + ρ|s(k)|α sgn(s(k))] (13) where, Φδ = Φτ − I and ρ = kτ . Thus, a discrete time sliding mode control based on power rate reaching law is obtained. This control law is designed using the states of the system. Switching gain c can be obtained using the procedure given in [22] As, in practice all states of the system are not available for measurement and therefore control derived with the help of only output information of the system will be more useful from practical point of view. A generalized expression for the switching surface and the control using output information only has been derived and is given as [21], x(k) = Φτ C0−1 yk + [Γτ − Φτ C0−1 D0 ]u(k − 1), s(k) = cT (Φτ C0−1 yk + [Γτ − Φτ C0−1 D0 ]u(k − 1)) Authorized licensed use limited to: INDIAN INSTITUTE OF TECHNOLOGY BOMBAY. Downloaded on December 4, 2008 at 04:01 from IEEE Xplore. Restrictions apply. (14) (15) Single Machine Infinte Bus System 1.3 = −(cT Γτ )−1 [cT Φδ Φτ C0−1 yk −(cT Γτ )−1 [cT Φδ (Γτ − Φτ C0−1 D0 )u(k − 1) −(cT Γτ )−1 ρ|s(k)|α sgn(s(k))] (16) Thus, it can be seen from the Eqns. (15) and (16) that the states of the system are needed neither for switching function evaluation nor for the feedback purpose. POWER RATE REACHING LAW BASED SMC PSS CLASSICAL PSS 1.28 1.26 1.24 Delta (radians) u(k) 1.22 1.2 1.18 1.16 1.14 V. C ASE S TUDY 1.12 A single machine infinite bus power system is considered here for PSS design using power rate reaching law based sliding mode control technique. The classical power system stabilizer (PSS) is designed in the following way. The eigenvalue analysis of a power system is carried out and the participation ratio of the machine towards instability in the network, is estimated. Power system stabilizer using phase compensation technique is designed according to the participation ratio of the machine towards instability, till satisfactory closed loop performance of the power system is achieved. The above design of classical power system stabilizer (PSS) is iterative in nature and optimal tuning of parameters is based on the experience. If the power characteristics of the system changes, then the whole procedure of PSS design has to be repeated. So, design of classical power system stabilizers cannot be considered robust in nature for all operating points. The proposed power rate reaching law based sliding mode control technique used for power system stabilizer design is robust in nature for all the models and is not iterative . C. Design of PSS using discrete time power rate reaching law based sliding mode control for Single Machine Infinite Bus (SMIB) system The single machine infinite bus power system data is considered for designing PSS using power rate reaching law based sliding mode control. The block diagram of the system is shown in Fig. 1. The following parameters are used for simulation of the single machine infinite bus system model [11]: H = 5 sec., D = 0, Tdo = 6 sec., KE = 100, TE = 0.02 sec., xe = 0.2 p.u. 2 3 −3 4 B. Classical power system stabilizer design for a power system 1 4 5 Time in sec. 6 7 8 9 10 (a) Delta responses A. Linearization of power system Single Machine Infinte Bus System x 10 POWER RATE REACHING LAW BASED SMC PSS CLASSICAL PSS 3 2 Slip The Nonlinear differential equations governing the behavior power system can be linearized about a particular operating point to obtain a linear model which represents the small signal oscillatory response of a power system. A SIMULINK based block diagram including all the nonlinear blocks can also be used to generate the linear state space model of the system. 0 1 0 −1 −2 0 1 2 3 4 5 Time in sec. 6 7 8 9 10 (b) Slip responses Fig. 2. Delta and slip responses with classical PSS and PSS using power rate reaching law based sliding mode control technique for Pg0=0.5 pu, Vref=1.0 pu and Xe=0.25 pu As discussed in the previous section, the SISO linearized model of entire system obtained at nominal operating condition is obtained, which is represented by Eqn. (6). The power rate reaching law based sliding mode control given by Eqn. (16) is then applied to the actual nonlinear system to carry out simulations. D. Simulation with Non-linear model The slip of the machine is taken as output. This output signal of the controller and a limiter is added to Vref signal. This is used to damp out the small signal disturbances via modulating the generator excitation. The disturbance considered here is a self clearing fault which is cleared after 0.1 second. The limits of PSS output are taken as ±0.1. Simulation results for SMIB system for various operating conditions, with power rate reaching law based sliding mode controller and classical controller are shown in Fig. 2 to Fig. 5. As shown in plots, the proposed controller is able to damp out the oscillations in 1 to 2 seconds after clearing the fault. Even in some cases where, classical PSS cannot damp out the oscillations, the proposed controller is able to damp out Authorized licensed use limited to: INDIAN INSTITUTE OF TECHNOLOGY BOMBAY. Downloaded on December 4, 2008 at 04:01 from IEEE Xplore. Restrictions apply. Single Machine Infinte Bus System Single Machine Infinte Bus System 1.5 1.5 POWER RATE REACHING LAW BASED SMC PSS CLASSICAL PSS 1.4 1.4 1.3 1.3 Delta (radians) Delta (radians) POWER RATE REACHING LAW BASED SMC PSS CLASSICAL PSS 1.2 1.2 1.1 1.1 1 1 0.9 0 1 2 3 4 5 Time in sec. 6 7 8 9 0.9 10 0 1 2 (a) Delta responses −3 8 4 5 Time in sec. 6 7 8 9 10 (a) Delta responses −3 Single Machine Infinte Bus System x 10 3 10 Single Machine Infinte Bus System x 10 POWER RATE REACHING LAW BASED SMC PSS CLASSICAL PSS POWER RATE REACHING LAW BASED SMC PSS CLASSICAL PSS 8 6 6 4 4 Slip Slip 2 2 0 0 −2 −2 −4 −6 −4 0 1 2 3 4 5 Time in sec. 6 7 8 9 10 −6 0 1 2 3 4 5 Time in sec. 6 7 8 9 10 (b) Slip responses (b) Slip responses Fig. 3. Delta and slip responses with classical PSS and PSS using power rate reaching law based sliding mode control technique for Pg0=1.0 pu, Vref=1.0 pu and Xe=0.25 pu Fig. 4. Delta and slip responses with classical PSS and PSS using power rate reaching law based sliding mode control technique for Pg0=1.25 pu, Vref=1.0 pu and Xe=0.25 pu R EFERENCES the oscillations. VI. C ONCLUSION This paper proposes, the design of PSS for single machine infinite bus (SMIB) system by power rate reaching law based sliding mode control technique. It is found that designed controller provides good damping enhancement for various operating points of SMIB power system. The proposed controller results in a better response behavior to damp out the oscillations. The conventional power system stabilizer is dynamic in nature and is required to be tuned according to power characteristics where as, the proposed controller is non-dynamic in nature and a single controller structure is able to damp out the oscillations for all models. Simulation results from a nonlinear power system are given to demonstrate the applicability and effectiveness of the proposed approach. The proposed approach can be extended to a multimachine system by considering multimachine power system as a set of interconnected single machine systems. [1] F. DeMello and C.Concordia, “Concepts of synchronous machine stability as affected by excitation control,” IEEE Trans. on Power Apparatus and Systems, vol. PAS-88, pp. 316–329, 1969. [2] H.Jiang, H. Cai, J. F. Dorsey, and Z. Qu, “Towards a globally robust decentralized control for large scale power systems,” IEEE Transactions on Control Systems Technology, vol. 5, no. 3, pp. 309– 319, May 1997. [3] Y. Wang, G. Guo, and D. J. Hill, “Robust decentralized nonlinear controller design for multi-machine power systems,” Automatica, vol. 33, no. 9, pp. 1725–1733, September 1997. [4] E.V.Larsen and D.A.Swann, “Applying power system stabilizers parti: General concepts,” IEEE Trans. on Power Apparatus and Systems, vol. PAS-100, no. 6, pp. 3017–3024, June 1981. [5] ——, “Applying power system stabilizers part- ii: General concepts,” IEEE Trans. on Power Apparatus and Systems, vol. PAS-100, no. 6, pp. 3025–3033, June 1981. [6] S.Chen and O.P.Malik, “H∞ optimization- based power system stabilizer design,” in IEE proceedings Part-C, vol. 142, no. 2, March 1995, pp. 179–184. [7] M. L. Kothari, K. Bhattacharya, and J. Nanda, “Adaptive power system stabilizer based on pole shifting technique,” in IEE proceedings-C, vol. 143, 1996, pp. 96–98. [8] F. Rashidi, M. Rashidi, and H. Amiri, “An adaptive fuzzy sliding mode control for power systems stabilizer,” in Industrial Electronics Society,2003, IECON’03. The 29th Annual Conference of the IEEE, November 2003, pp. 626–630. Authorized licensed use limited to: INDIAN INSTITUTE OF TECHNOLOGY BOMBAY. Downloaded on December 4, 2008 at 04:01 from IEEE Xplore. Restrictions apply. [19] B.Bandyopadhyay, V.K.Thakar, C.M.Saaj, and S. Janardhanan, “Algorithm for computing sliding mode control and switching surface from output samples,” in Proc.8th IEEE Variable Structure Systems Workshop, September 2004, p. Paper No.4. [20] W. Gao and J. C. Hung, “Variable structure control of nonlinear systems: A new approach,” IEEE transactions on Industrial Electronics, vol. 40, no. 1, pp. 45–5, February 1993. [21] V. K. Thakar, “Power rate reaching law based discrete sliding mode control,” Annual Progress Seminar 2005. [22] W. Gao, Y. Wang, and A. Homaifa, “Discrete-time variable structure control systems,” IEEE transactions on Industrial Electronics, vol. 42, no. 2, pp. 117–122, April 1995. Single Machine Infinte Bus System 1.6 POWER RATE REACHING LAW BASED SMC PSS CLASSICAL PSS 1.5 Delta (radians) 1.4 1.3 1.2 1.1 1 L IST OF F IGURES 0.9 0 1 2 3 4 5 Time in sec. 6 7 8 9 10 2 (a) Delta responses −3 10 1 Single Machine Infinte Bus System x 10 POWER RATE REACHING LAW BASED SMC PSS CLASSICAL PSS 3 8 6 4 Slip 2 4 0 −2 −4 −6 −8 5 0 1 2 3 4 5 Time in sec. 6 7 8 9 10 (b) Slip responses Block diagram of a Single Machine Infinite Bus (SMIB) system . . . . . . . . . . . . . . . . . . Delta and slip responses with classical PSS and PSS using power rate reaching law based sliding mode control technique for Pg0=0.5 pu, Vref=1.0 pu and Xe=0.25 pu . . . . . . . . . . Delta and slip responses with classical PSS and PSS using power rate reaching law based sliding mode control technique for Pg0=1.0 pu, Vref=1.0 pu and Xe=0.25 pu . . . . . . . . . . Delta and slip responses with classical PSS and PSS using power rate reaching law based sliding mode control technique for Pg0=1.25 pu, Vref=1.0 pu and Xe=0.25 pu . . . . . . . . Delta and slip responses with classical PSS and PSS using power rate reaching law based sliding mode control technique for Pg0=1.35 pu, Vref=1.0 pu and Xe=0.25 pu . . . . . . . . Fig. 5. Delta and slip responses with classical PSS and PSS using power rate reaching law based sliding mode control technique for Pg0=1.35 pu, Vref=1.0 pu and Xe=0.25 pu [9] P. Kundur, Power System Stability and Control. McGraw-Hill, Inc. Newyork, 1993. [10] E.V.Larsen and D.A.Swann, “Applying power system stabilizers partiii: General concepts,” IEEE Trans. on Power Apparatus and Systems, vol. PAS-100, no. 6, pp. 3034–3046, June 1981. [11] K.R.Padiyar, Power System Dynamics Stability and Control. Interline publishing private Ltd. Bangalore, 1996. [12] V. L. Syrmos, C. T. Abdallah, P.Dorato, and K.Grigoriadis, “Static output feedback -a survey,” Automatica, vol. 33, no. 2, pp. 125–137, February 1997. [13] G. M. Kranc, “Input-output analysis of multirate feedback systems,” IEEE transactions on Automatic Control, vol. 3, no. 1, pp. 21–28, November 1957. [14] E. Jury, “A note on multirate sampled-data systems,” IEEE transactions on Automatic Control, vol. 12, no. 3, pp. 319–320, June 1967. [15] P. T. Kabamba, “Control of linear systems using generalized sampleddata hold functions,” IEEE transactions on Automatic Control, vol. 32, no. 9, pp. 772–783, September 1987. [16] T. Hagiwara and M. Araki, “Design of a stable state feedback controller based on the multirate sampling of plant output,” IEEE transactions on Automatic Control, vol. 33, no. 9, pp. 812–819, September 1988. [17] A. Chammas and C. Leondes., “Pole assignment by piecewise constant output feedback,” International Journal of Control, vol. 29, no. 1, pp. 31–38, 1979. [18] M. E. Polites, “Ideal state reconstructor for deterministic digital control systems,” International Journal of Control, vol. 49, no. 6, pp. 2001– 2011, 1989. Authorized licensed use limited to: INDIAN INSTITUTE OF TECHNOLOGY BOMBAY. Downloaded on December 4, 2008 at 04:01 from IEEE Xplore. Restrictions apply. 3 4 5 5 6