Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Ground loop (electricity) wikipedia , lookup
Electrical engineering wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Dynamic range compression wikipedia , lookup
Transmission line loudspeaker wikipedia , lookup
Hendrik Wade Bode wikipedia , lookup
Resonant inductive coupling wikipedia , lookup
Electronic engineering wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Oscilloscope history wikipedia , lookup
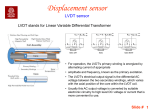
SINUSOIDAL OSCILLATOR/DEMODULATOR PROJECT PROPOSAL Design Team: Manuel Medeiros Aaron Ciardullo Connor Bailey Project Sponsor: TransTek Incorporated 10 Industrial Drive P.O. Box 338 Ellington, CT 06029 University of Connecticut ECE 4901 Contents Summary: Background: Overview: Theory: Solution: Theory: Approach: Preliminary Experimental Results: Project: Budget: Collaborators: Manuel Medeiros: Education: Experience: Connor Bailey: Education: Experience: Aaron Ciardullo: Education: Experience: 1 Summary: This document will cover the proposal of the design of a sinusoidal oscillator and demodulator unit that will be used as a standalone unit to drive a linear variable differential transducer (LVDT). This unit has been requested by LVDT manufacturer Trans-Tek incorporated, who will also be collaborating with our team throughout the project. This proposal will include a few different possible design ideas and routes that can be taken to achieve our overall goal. Background: Overview: A linear variable differential transducer (LVDT) is primarily used as a position sensor for various applications from robotics, to manufacturing. The problem with LVDTs is that to run them they require that one use a signal generator to drive the primary coil as well as custom circuitry that can analyze the output sinusoidal waveform that the secondary coil generates. These supporting devices can be relatively large and make the implementation of a LVDT more difficult due to size limitations. It would be much easier to be able to have a device that only requires a DC power supply and some circuitry that can read a DC voltage, which most small microcontrollers can do easily. This is where our device comes into play. Our device is going to essentially be a LVDT driver box that will only need a DC power supply to function. The device will create a sinusoidal wave form to excite the primary coil on the transducer and then demodulate the sinusoidal from the secondary coil to a DC voltage that can be read. This makes implementing an LVDT much easier for system designers because they now have a much smaller device to work with. Theory: “LVDT stands for Linear Variable Differential Transformer. An LVDT is also referred to as a linear displacement transducer, or linear position transducer. This sensor device measures linear 2 displacement (or linear position) very accurately. The typical LVDT sensor consists of a primary coil and two secondary coils wound on a coil form. A ferromagnetic core links the electromagnetic field of the primary coil to the secondary coils. Differencing the output of these coils will result in a voltage proportional to the relative movement of the core versus the coils.” (retrieved from Trans-Tek http://transtekinc.com/what-is-an-lvdt/ ) This is shown in figure 1. FIGURE 1 LVDT DIAGRAM. DIGITAL IMAGE. N.P., N.D. WEB. <HTTP://WWW.MACROSENSORS.COM/>. Solution: Theory: The current design for the interface circuit uses all discrete components; as a result, the design is not very flexible different types of linear variable differential transformers (LVDT). Using a Digital signal processor, allows us to reprogram the device to meet the requirements for many more LVDTs. The 3 Digital signal processor can also output a digital signal instead of an analog signal which would allow a customer to implement Trans-Tek products in different configurations. FIGURE 2 BLOCK DIAGRAM OF BASIC OPERATION OF DSP BASED DEVICE Figure 1 shows the basic operation of a DSP device. The DSP will generate a sine wave that would then go through some signal conditioning so that it meets the requirements to be feed into the primary side of the LVDT. The secondary side is then taken from the LVDT and goes through signal conditioning so that the signal can be read by the onboard analog to digital converter on the DSP. The DSP then demodulates the signal to provide an output which could be either digital or analog. Approach: There are two ways to create a sinusoid using a digital device. One method would be to use direct digital synthesis and the other would be to write different levels in a digital to analog converter. In the direct digital synthesis, the DSP creates a sinusoidal pulse width modulation signal (SPWM) which is then passed through a low pass filter to provide a sinusoid fundamental signal. The reason that we use SPWM is so that we push the third harmonic to higher frequency which then makes it easier to filter. This method is used on microcontrollers that do not have a full DAC installed. The problem with this method is that we must create a very high frequency PWM signal to be filtered which is intensive for the controller. The other method is very straightforward; a sinusoid table is created in the DSP. Then each value in the table is written to the DAC sequentially. The only thing that limits this processes is how long it takes the DAC to write. 4 FIGURE 3 SIGNAL CONDITIONING FOR DAC APPROACH Figure 2 is a differential amplifier with a push-pull amplifier in series. The DAC can only create positive voltages and therefore we use the differential amplifier to remove the DC offset and set the voltage gain. Since the output current is quite small from the op-amp we need a current amplifier in order to support the load from the LVDT. 5 FIGURE 4 H-BRIDGE APPROACH FOR DIRECT DIGITAL SYNTHESIS Figure 3 shows the signal conditioning for the direct digital synthesis approach. In this method the DSP provides a PWM signal for each of the four switches. The H-bridge then inverts the DC Bus at high speed which creates a PWM centered at zero. This PWM signal is then filtered to create the sine wave. This approach is good as it the switches can be large to support any load, however since the LVDT is an inductive load each switch would need a snubber and the DSP would have to provide high speed PWM signals. Preliminary Experimental Results: We explored three different types of chips the TMS320F2877S, MSP430 and an Arduino DUE with the AT91SAM3X8E. MSP430- We first tried to create a sinusoid using Direct digital synthesis on the MSP430. However, the fastest PWM that could be created was around 7KHz, which would not meet the 10 KHz specification and would be very hard to filter as it could not utilize SPWM. TMS320F2877S- For this chip we started to use the example code provided by Texas instruments to create a sinusoid using direct digital synthesis. However, when loading the code into the microcontroller we had some problems having it to output. Therefore, we need to do more testing in order to use this microcontroller. Arduino DUE with AT91SAM3X8E- On this chip we used the DAC to produce a sine wave with 2V peak to peak with a 1V offset. THD for the sine wave was less than 5% and the maximum frequency that we could produce was 5KHz. We believe with some code optimization we should be able to produce much higher frequency sine waves. 6 FIGURE 5 ARDUINO CODE FOR SINE WAVE UP TO 5KHZ We also started to write the demodulation code to run with schedule (Arduino multithreading) however we have not tested it with the sine wave running at the same time. 7 Project: FIGURE 6 TIMELINE OF OUR PROGRESS UP TO PRESENT DATA 11/8 The team was formed in the first week of September and spent the first meeting getting to know each other. Later that week we set out to meet with our sponsor company, Trans-Tek, to discuss specifications and objectives. After meeting with Trans-Tek and getting a tour of their facility we discussed and reviewed the specifications they expected of us. We spent a lot of time considering the specifications in order to fully understand what the design was required to do. In the last week of September, we began to research possible solutions and started completed our project statement. Into the first weeks of October we continued to research and debate possible options to implement in our design. We decided to order two microcontrollers and one digital signal processor (DSP) to tamper with and see if we could meet the specifications. In the second week of October we attained the schematic of a similar oscillator-demodulator design from Trans-Tek, which also drives an LVDT. Through the remainder of October, we simulated and tried to decipher the workings of this unit, 8 in order to come to a better understanding of how to drive an LVDT. The circuit and its simulated results are given below: FIGURE 7 TRANS-TEK OSCILLATOR CIRCUIT 9 FIGURE 8 OSCILLATOR OUTPUT TO LVDT 10 FIGURE 9 TRANS-TEK DEMODULATOR CIRCUIT 11 FIGURE 10 DEMODULATOR OUTPUT Currently, we have two design options up for consideration. The next steps are to build both prototypes and strenuously test them. From the results of these tests we can decide on the final design and begin optimizing it. We will continue to tweak and redesign in order to meet all specifications and also endeavor to maintain the smallest unit possible. Budget: Trans-Tek has graciously offered to cover all of our R&D expenses throughout this project. This includes any supplies we need for our design such as microprocessors, digital signal processing (DSP) chips, and other circuitry components including resistors, capacitors and op-amps. We anticipate the most expensive parts of our design to be the processors and PCB manufacturing. Even though a specific number has not been specified for this project, we are working closely to make sure that we are getting the best performance to cost ratio that we can with our components. This includes evaluating smaller 12 and cheaper microcontrollers to complete our design rather than the bigger more expensive DSP chips if possible. We are also looking at different PCB manufactures to minimize the cost of developing prototype PCBs where we do not need the highest quality possible since issues can arise that might impact the layout of the PCB. We are also minimizing the amount of circuitry needed for our design and trying to utilize the advanced software techniques that have come out over the recent years that allows us to do most of the signal conditioning through software rather than dedicated analog hardware. Collaborators: Manuel Medeiros: Education: University of Connecticut, Storrs, CT Bachelor of Science in Engineering: Major in Computer Engineering; Major in Electrical Engineering Bachelor of Arts: Major in German Studies; Minor in Mathematics Graduation Expected December 2017 Experience: Transtek Incorporated, Ellington, CT Intern, Summer 2014-Present UTC Aerospace Systems, Windsor Locks, CT Intern, Summer 2013 MAHLE Behr GmbH & Co. KG, Stuttgart, Germany Intern, March 2015-August 2015 Connor Bailey: Education: Bachelor of Science in Engineering: Major in Electrical Engineering, Minor in Mathematics 13 Expected Graduation: May 2016 Experience: BAE Systems, Nashua NH Intern, Summer 2015 Aaron Ciardullo: Education: University of Connecticut Bachelor of Science in Engineering: Major in Electrical Engineering Anticipated Graduation Date May 2016 Experience: General Dynamics Electric Boat, New London, CT June 2015 – August 2015 APEDL, Storrs, CT August 2014 – December 2014 General Dynamics Electric Boat, New London, CT July 2014 – August 2014 Experis at Carbonite, Cambridge, MA July 2013 – August 2013 14