Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Analytical mechanics wikipedia , lookup
Fictitious force wikipedia , lookup
Lagrangian mechanics wikipedia , lookup
Statistical mechanics wikipedia , lookup
Equations of motion wikipedia , lookup
Electromagnetism wikipedia , lookup
Hunting oscillation wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Virtual work wikipedia , lookup
Centripetal force wikipedia , lookup
Classical central-force problem wikipedia , lookup
Classical mechanics wikipedia , lookup
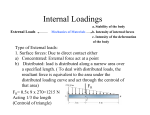
Engineering Mechanics 1 CHAPTER 1 ENGINEERING MECHANICS 1.1 INTRODUCTION Engineering mechanics is the science that considers the motion of bodies under the action of forces and the effects of forces on that motion. Mechanics includes statics and dynamics. Statics deals with the special case of a body at rest or a body that moves with constant velocity. A body at rest or moving with constant velocity is said to be in equilibrium. This is sometimes also called as static equilibrium. When the body moves with finite velocity or acceleration, the principles of statics are no longer applicable. The mechanics of such a system is called dynamics. When the body has no rotational motion, it is called as particle. Usually, each point on a rigid-body is always at a constant distance from any other point in the body. Dynamics is further divided into kinematics and kinetics. Kinematics defines the relationships among displacement, velocity, and acceleration of a moving body. Kinetics defines the relationship between the forces that act on a body and the motion of the body. Analysis of the bodies can either be conducted in plane or in three-dimensions. A rigid-body in space has six degree of freedom. This chapter provides a brief review of various topics in Mechanics. 1.2 NEWTONIAN MECHANICS Collectively, the study of statics and dynamics is called classical mechanics. Classical mechanics treats the motion of bodies of ordinary size that move at speeds that are small compared to the speed of light. Newton (1642-1727) formulated the law of universal gravitation and the mathematics of calculus. Newton introduced the concepts of force and mass. Newton formulated the three laws of motion that are the basis of engineering applications of mechanics. The classical mechanics is often called Newtonian mechanics. 1.3 NEWTON’S LAWS OF MOTION Newton’s laws are fundamentally applicable directly to a particle that is a body which may be treated as having point mass. Newton’s laws may be stated in terms of a particle parameters as follows: Solving Engineering Mechanics Problems with MATLAB 2 First Law: In the absence of applied forces, a particle originally at rest or moving with constant speed in a straight line will remain at rest or continue to move with constant speed in a straight line. Second Law: If a particle is subjected to a force, the particle will accelerate. The acceleration of the particle will be in the direction of the force, and the magnitude of the acceleration will be proportional to the force and inversely proportional to the mass of the particle. Newton’s second law can be expressed in the form: a= F m ...(1.1) where F = denotes force m = mass a = acceleration Newton’s second law is the basis for the study of kinetics of a particle. Third Law: For every action, there is an equal and opposite reaction, or the mutual forces exerted by two particles on each other are always equal and oppositely directed. 1.4 RESULTANTS OF COPLANAR FORCE SYSTEMS In statics, it is often necessary to find the state of equilibrium or the resultant of several forces acting in plane. In coplanar system, the resultant R for a concurrent forces is given by R= and ( ΣFx )2 + ( ΣFy ) 2 ΣFy θ x = tan −1 ΣFx ...(1.2) where ΣFx , ΣFy = algebraic sums of the x and y components of the forces of the system respectively. θx = the angle that the resultant R makes with the x-axis. For a parallel system, the resultant R is given by R = ΣF and Ra = ΣM O where ΣF = algebraic sum of the forces of the system O = any moment center in the plane a = perpendicular distance from the moment center O to the resultant R Ra = moment of R with respect to O ΣMO = algebraic sum of the moments of the forces of the system with respect to O ...(1.3) Engineering Mechanics 3 The resultant R for a non-concurrent and non-parallel system is given by R= and ( ΣFx )2 + ( ΣFy ) 2 ∑ Fy θx = tan–1 ∑ Fx ...(1.4) where ΣFx, ΣFy = algebraic sums of the x and y components of the forces of the system respectively θx = the angle that the resultant R makes with the x-axis. The action of the line of the resultant force is given by ...(1.5) Ra = Σ Mo where O = any moment center in the plane a = perpendicular distance from the moment center O to the resultant R Ra = moment of R with respect to O ΣMO = algebraic sum of the moments of the forces of the system with respect to O 1.5 RESULTANTS OF NON-COPLANAR FORCE SYSTEMS In non-coplanar force systems, the forces are neither all concurrent nor in parallel. The resultant R for a concurrent system is given by R= ( ΣFx )2 + ( ΣFy ) + ( ΣFz )2 2 ...(1.6) with the direction cosines cos θ x = ΣFy ΣFx ΣFz , cos θ y = and cos θ z = R R R where ΣFx, ΣFy, ΣFz = algebraic sums of the x, y and z components of the forces of the system respectively. For a parallel system, the resultant R is given by R = ΣF Rx = ΣMz ...(1.7) Rz = ΣMx where ΣF = algebraic sum of the forces of the system x = perpendicular distance from the yz plane to the resultant z = perpendicular distance from the xy plane to the resultant ΣMx, ΣMz = algebraic sum of the moments of the forces of the system about the x and z axes respectively Solving Engineering Mechanics Problems with MATLAB 4 If ΣF = 0, the resultant couple C when exists is given by C = (∑ M x )2 + (∑ M z )2 and ∑ Mz φ = tan–1 ∑ Mx ...(1.8) where φ is the angle that the vector representing the resultant couple makes with the x-axis. The magnitude of the resultant R of the non-concurrent system at the origin (x, y and z axes is placed with their origin at the base point) is given by R= (∑ Fx )2 + (∑ Fy )2 + (∑ Fz )2 ...(1.9) with the direction cosines cosθx = ΣFy ΣFx ΣFz , cos θ y = and cos θ z = R R R ...(1.10) The magnitude of the resulting couple C is given by C= (Σ M x ) 2 + (Σ M y ) 2 + (Σ M z ) 2 ...(1.11) with the direction cosines cosφx = ΣM y ΣM x ΣM z , cos φ y = and cos φ z = C C C ...(1.12) where ΣMx, ΣMy, ΣMz = algebraic sums of the moments of the forces of the system about x, y and z-axes respectively. φx, φy, φz = angles which the vector representing the couple C makes with the x, y and z-axes respectively. 1.6 EQUILIBRIUM OF COPLANAR FORCE SYSTEMS The necessary and sufficient conditions for the equilibrium of a coplanar force system are: R = ΣF = 0 and C = ΣM = 0 ...(1.13) where ΣF = vector sum of all forces of the system ΣM = vector sum of the moments of all the forces of the system. For concurrent system, any of the following sets of equations ensures equilibrium (the resultant is zero). The concurrency is assumed at the origin. Set 1: ΣFx = 0 ΣFy = 0 Engineering Mechanics 5 Set 2: ΣFx = 0 ΣMA = 0 ...(1.14) (A may be chosen any place in the plane except on the y-axis) Set 3: ΣMA = 0 ΣMB = 0 (A and B may be chosen any place in the plane except A, B and the origin do not lie on the same straight line) where ΣFx, ΣFy = algebraic sum of the x and y components of the forces of the system respectively. ΣMA, ΣMB = algebraic sum of the moments of the forces of the system about A and B respectively. For parallel system, any of the following sets of equations ensures equilibrium (the resultant is neither a force nor a couple). Set 1: ΣF = 0 ΣMA = 0 ...(1.15) Set 2: ΣMA = 0 ΣMB = 0 (A and B may chosen any place in the plane provided in the line joining A and B is not parallel to the forces of the system) where ΣF = algebraic sum of the forces of the system parallel to the action lines of the forces ΣMA, ΣMB = algebraic sum of the moments of the forces of the system about A and B respectively. For non-concurrent and non-parallel system, any of the following sets of equations ensures equilibrium (the resultant is neither a force nor a couple). Set 1: ΣFx = 0 ΣFy = 0 ΣMA = 0 ...(1.16) Set 2: ΣFx = 0 ΣMA = 0 ΣMB = 0 ...(1.17) (Provided that the line joining A and B is not perpendicular to the x-axis) Set 3: ΣMA = 0 ΣMB = 0 ΣMC = 0 ...(1.18) (Provided that A, B and C do not lie on the same straight line) where ΣFx, ΣFy, ΣFz = algebraic sum of the x, y and z components of the forces respectively ΣMA, ΣMB, ΣMC = algebraic sum of the moments of the forces of the system about any three points A, B and C in the plane respectively. Solving Engineering Mechanics Problems with MATLAB 6 1.7 EQUILIBRIUM OF NON-COPLANAR FORCE SYSTEM The necessary and sufficient conditions that R and C be zero vectors are given by R = ΣF = 0 and C = ΣM = 0 ...(1.19) where ΣF = vector sum of all the forces of the system ΣM = vector sum of the moments of all the forces of the system relative to any point. For a concurrent and non-coplanar system, the following set of equations must be satisfied: ΣFx = 0 ΣFy = 0 ...(1.20) ΣFz = 0 where ΣFx, ΣFy, ΣFz = algebraic sums of the x, y and z components of the forces of the system respectively. For a parallel non-coplanar system, the set of equations to be satisfied for equilibrium are: ΣFy = 0 ΣMx = 0 ...(1.21) ΣMz = 0 where ΣFy = algebraic sum of the forces of the system along the y-axis which is selected parallel to the system. ΣMx, ΣMz = algebraic sums of the moments of the forces of the system about the x and z axes respectively. The necessary and sufficient conditions required for equilibrium for a non-concurrent non-coplanar system are given by ΣFx = 0 ΣFy = 0 ΣFz = 0 ΣMx = 0 ΣMy = 0 ΣMz = 0 ...(1.22) where ΣFx, ΣFy, ΣFz = algebraic sums of the x, y and z components of the forces of the system respectively. ΣMx, ΣMy, ΣMz = algebraic sums of the components of the forces of the system about the x, y and z axes respectively. 1.8 TRUSSES A truss is a system of slender members that are pinned together. The members are free to rotate at the pinned joints and carry forces only. All the external forces act at the joints. Trusses are examples of coplanar force systems in equilibrium. Trusses are assumed to be rigid members all located in one plane. The weights of the truss members are neglected. Forces are transmitted Engineering Mechanics 7 from one member to another through pin joints. These members are called two-force members. A twoforce member is in equilibrium under the effect of two resultant forces one at each end. The two-force members will be either in tension or compression. There are two methods available for the analysis of trusses. For a stable planar truss, the following condition applies: 2n = m + p where n = number of joints ...(1.23) m = number of members p = number of unknown external forces In a stable three-dimensional truss, the condition that holds is 3n = m + p ...(1.24) Method of Joints: In this method, a free-body diagram of any pin in the truss is drawn. Maximum of two unknown forces act on that pin. Proceed from one pin to another until all unknowns have been obtained. Method of Sections: A free-body diagram of a section of the truss is drawn. The forces in the members cut act as external forces. The system is a non-concurrent and non-parallel one. In any one section no more than three unknown forces are to be found. 1.9 ANALYSIS OF BEAMS A beam is a long member that is subjected to external lateral forces, F and external lateral moments, T. These cause internal lateral forces V called shear forces and internal lateral moments M known as bending moments. The shear forces and the bending moments induce lateral deformations, also called bending. Shear and Moment Diagrams: Shear and moment diagrams show the variation of V and M across a beam. Summation of the forces and moments of forces are used to plot V and M directly for the beams. The slope of the shear diagram at any section along the beam is the negative of the load per unit length at that point. The change in shear between two sections of a beam carrying a distributed load equals the negative area of the load diagram between the two sections. The slope of the moment diagram at any section along the beam is the value of the shear at that section. The change in the moment between two sections of a beam equals the area of the shear diagram between the two sections. 1.10 FRICTION The tangential force that opposes the sliding of one body relative to the other is the static friction between the two bodies. Kinetic friction is the tangential force between two bodies after motion begins. The body begins to slide only when the applied force exceeds the static frictional force at the floor. Referring to Fig.1.1, the following terms are defined: Limiting friction F′ is the maximum value of static friction that occurs when motion is impending. F ' Coefficient of static friction is the ratio of the limiting friction F′ to the normal force N, or µ= N Solving Engineering Mechanics Problems with MATLAB 8 Coefficient of kinetic friction is the ratio of the kinetic friction to the normal force. Angle of reponse, α is the angle to which an inclined plane may be raised before an object resting on it will move under the action of the force of gravity and the reaction of the plane. In Fig.1.1, R is the resultant of F ′ and N and α = φ. W F′ N R φ Fig. 1.1 Sliding friction Belt Friction: When a belt passes over a pulley, the tensions in the belt on the two sides of the pulley will differ. When slip is about to occur, the tensions T1 and T2 are given by T1 = T2eµβ ...(1.25) where T1 = larger tension T2 = smaller tension µ = coefficient of friction β = angle of wrap (radian) e = 2.718 (base of natural logarithms) Screw frictional force occurs when a nut is screwed over a bolt. 1.11 FIRST MOMENTS AND CENTROIDS The centroidal position vector r of a geometry composed of n areas d1, d2, d3, ..., dn located at points P1, P2, P3, …, Pn represented by position vectors r1, r2, r3, …, rn respectively is defined as n ∑ ri di r = i =1 n ∑ di i =1 where d i = area of ith element r i = position vector of the ith element n ∑ di = total area of all n elements i =1 n ∑ ri di = first moment of area of all the elements relative to selected point O. i =1