Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Dynamic substructuring wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Lagrangian mechanics wikipedia , lookup
Brownian motion wikipedia , lookup
N-body problem wikipedia , lookup
Virtual work wikipedia , lookup
Statistical mechanics wikipedia , lookup
Analytical mechanics wikipedia , lookup
Jerk (physics) wikipedia , lookup
Hunting oscillation wikipedia , lookup
Centripetal force wikipedia , lookup
Work (thermodynamics) wikipedia , lookup
Work (physics) wikipedia , lookup
Routhian mechanics wikipedia , lookup
Seismometer wikipedia , lookup
Classical central-force problem wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Rigid body dynamics wikipedia , lookup
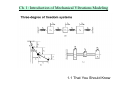
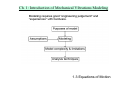
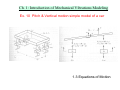
Ch. 1: Introduction of Mechanical Vibrations Modeling 1.0 Outline That You Should Know Newton’s Second Law Equations of Motion Equilibrium, Stability 1.0 Outline Ch. 1: Introduction of Mechanical Vibrations Modeling 1.1 That You Should Know Vibration is the repetitive motion of the system relative to a stationary frame of reference or nominal position. Principles of Motion Æ Vibration Modeling Math Æ Vibration Analysis *** design the system to have a particular response *** 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Spring-Mass Model Mechanical Energy = Potential + Kinetic From the energy point of view, vibration is caused by the exchange of potential and kinetic energy. When all energy goes into PE, the motion stops. When all energy goes into KE, max velocity happens. Spring stores potential energy by its deformation (kx2/2). Mass stores kinetic energy by its motion (mv2/2). 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Springs and Masses connection as the way to model the vibrating system. 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Real-life system may not see the springs/masses connection explicitly! You have to devise the simple model smartly, suitable to the requirements. 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Various forms of springs: linear, traverse, torsion spring Gravity force can make up the spring! Because work done by the gravity force is a kind of PE. When the altitude change, PE change Æ KE change. 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Spring Æ Stiffness (N/m or Nm/rad) Spring has the characteristic that force is the function of deformation: F = k(x). If k is constant, the spring is linear. Practically it is not constant. k is generally slope of the F-x curve, and is known as the stiffness. 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Stiffness is the property of the object which depends mainly on its shape and material properties, e.g. E. Equivalent massless spring constants 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Equivalent massless spring constants (cont.) 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Equivalent massless spring constants (cont.) 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Equivalent massless spring constants (cont.) 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Equivalent massless spring constants (cont.) 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Spring connection: series or parallel Forces add up Disp. add up The calculated stiffness value, keff, is used in the modeling system. keff 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 1 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 2 Derive the equivalent spring constant for the system in the figure. 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling let the system be deviated by torque τ F at that point k= Δ at distance l = a, Feq = at distance l = b, Feq = τ a and Δ =δ ⇒ kl = a = τ b and Δ = δ ⇒ kl =b b a τ aδ τa = 2 = k2 bδ k 2b 2 τ k2b 2 = ∴ kl = a = 2 δ a a kl = a k1k2b 2 = is in series with k1 ∴ keq = 1 k1a 2 + k2b 2 1 + kl = a k1 1 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Perturb the system by force F and observe the displacement x F keq = but F = k1 ( x − aθ ) x k ( x − aθ ) ∴ keq = 1 ⇒ need to find relation between x and θ x ⎡⎣ ∑ M O = 0 ⎤⎦ k2bθ × b − k1 ( x − aθ ) × a = 0 k1ax k1k2b 2 θ= 2 ∴ keq = 2 k1a + k2b k1a 2 + k2b 2 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 3 The system shown in the figure consists of two gears A and B mounted on uniform circular shafts of equal Stiffness GJ/L; the gears are capable of rolling on each other without slip. Derive an expression for the Equivalent spring constant of the system for the radii ratio Ra / Rb = n. 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Apply torque M at gear A, then gear A rotates θ A . Shaft exerts resistant moment M A and gear B exerts reaction force F . In turns, at gear B, opposite reaction force − F happens and shaft exerts moment M B to resist rotation θ B . keq@A = M θA ⇒ need to write M and θ A as functions of given parameters. ⎡⎣ ∑ M = 0 ⎤⎦ M = M A + FRA and M B = FRB GJ GJ by spring stiffness, M A = θ A and M B = θB L L θ R by geometry, n = A = B RB θ A GJ θB GJ GJ L θA + ∴M = RA = 1 + n2 )θA ( RB L L ∴ keq@A = M θA = GJ 1 + n2 ) ( L 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling θB ⎛ M A ⎞ =⎜ ⎟ =n θ A ⎝ M B ⎠ trans torsional spring at gear B is connected to gear A M GJ 1 M A kB = B = = 2 ⇒ gear A sees stiffness at gear B = n 2 kB L n θA θB ∵ springs are connected in parallel, equivalent stiffness at gear A GJ keq@A = kA + n 2 kB = 1 + n2 ) ( L 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 4 The two gears of the system have mass polar moment of inertia IA and IB. Derive an expression for the equivalent mass polar moment of inertia for the radii ratio RA / RB = n. 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Ignore the torsional spring and write the equation of motion at gear A ⎡⎣ ∑ M = Iθ ⎤⎦ M − FRA = I Aθ A to eliminate F , consider motion at gear B FRB = I Bθ B Employ the geometric constraints: θB R =n= A θA RB I B n 2θ A RA = I Aθ A ⇒ M = ( I A + n 2 I B )θ A M− RA ∴ I eq@A = I A + n 2 I B 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Mass, Inertia To store / release kinetic energy 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling Damper Æ viscous coefficient (Ns/m or Nms/rad) To dissipate energy f d = − F = −cx 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling 1.1 That You Should Know Ch. 1: Introduction of Mechanical Vibrations Modeling 1.2 Newton’s Second Law Many ways to derive the equations of motions Newton-Euler is one, which is suitable for situations… • system in planar motion • force and motion have constant direction • system is simple 1.2 Newton’s Second Law Ch. 1: Introduction of Mechanical Vibrations Modeling Relative Velocity v A = v B + ω × rA/B + v rel v A = velocity of the particle A v B = velocity of the particle B v A/B = velocity of A relative to B = ω × rA/B + v rel ≠ velocity of A as seen from the observer v rel = xi + yj = velocity of A as seen from an observer at anywhere fixed to the rotating x-y axes ω × rA/B = ( v rel observed from nonrotating x-y ) − ( v rel observed from rotating x-y ) If we use nonrotating axes, there will be no ω × rA/B term. This makes v rel = v A/B , which means the velocity seen by the observer is the velocity of A relative to B. If B coincides with A, rA/B = 0. This makes v rel = v A/B , which means the velocity seen by the observer is the velocity of A relative to B, even the observer is rotating. 1.2 Newton’s Second Law Ch. 1: Introduction of Mechanical Vibrations Modeling Relative Acceleration Differentiating the relative velocity equation results in the relative acceleration equation: a A = a B + ω × rA/B + ω × rA/B + v rel V Recall the vector differentiation relation, rA/B = v rel + ω × rA/B ω v rel = a rel + ω × v rel ⎛ dω ⎞ ⎛ dω ⎞ ⎛ dω ⎞ , + ω × ω ∴ = ⎟ ⎜ ⎟ ⎜ ⎟ ⎝ dt ⎠ xy ⎝ dt ⎠XY ⎝ dt ⎠ xy ω =⎜ → angular acceleration observed in fixed frame = that observed in the rotating frame Note: rA/B = xi + yj v rel = xi + yj a rel = xi + yj ( v rel and a rel = velocity and acceleration seen by the rotating observer ) ∴ a A = a B + ω × rA/B + ω × (ω × rA/B ) + 2ω × v rel + a rel 1.2 Newton’s Second Law Ch. 1: Introduction of Mechanical Vibrations Modeling Newton formula for translational motion of the rigid body ∑ F = ma G ∑F = the resultant of the external forces = forces applied to the rigid body m = total mass aG = the acceleration of the center of mass G FBD 1.2 Newton’s Second Law Ch. 1: Introduction of Mechanical Vibrations Modeling Euler formula for planar rotational motion of the rigid body ∑M Gz = I Gω ∑M Gz = moment of the external forces about CM (G) in z − direction I G = centroidal mass moment of inertia about z − axis through CM (G) ω = rate of change of the angular velocity FBD 1.2 Newton’s Second Law Ch. 1: Introduction of Mechanical Vibrations Modeling Pure rotation Æ stationary point in the body ∑M Oz = I Oω ∑M Gz = moment of the external forces about O in z − direction I O = mass moment of inertia about z − axis through axis of rotation (O) ω = rate of change of the angular velocity I O = I G + md 2 FBD With this formula, the constraint force is eliminated 1.2 Newton’s Second Law Ch. 1: Introduction of Mechanical Vibrations Modeling 1.3 Equations of Motion 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 5 Simple 1 DOF m-k system 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 6 Simple 2 DOF m-k system 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 7 Simple 1 DOF pendulum 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 8 Compound 2 DOF pendulum A uniform rigid bar of total mass m and length L2, suspended at point O by a string of length L1, is acted upon by the horizontal force F. Use the angular displacement θ1 and θ2 to define the position, velocity, and acceleration of the mass center C in terms of body axes and then derive the EOM for the translation of C and the rotation about C. 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling L ⎡ ⎤ F s θ 2 + mg c θ 2 − T c θ 2−1 = m ⎢ L1θ1 s θ 2−1 − L1θ12 c θ 2−1 − 2 θ 22 ⎥ 2 ⎦ ⎣ L ⎤ ⎡ Fcθ 2 − mgsθ 2 + Tsθ 2−1 = m ⎢ L1θ1cθ 2−1 + L1θ12sθ 2−1 + 2 θ 2 ⎥ 2 ⎦ ⎣ L2 L2 mL22 θ2 F c θ 2 − T s θ 2−1 = 2 2 12 −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−− eliminate the constraint force T 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 9 Washing machine 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 9 Washing machine 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling y measured from unstrained spring position My + cy + ky = − Mg x measured from static equilibrium position static displacement equilibrium δ st = Mg / k y = x − δ st Mx + cx + kx = 0 Weight is balanced at all times by spring force kδ st Imbalance in the washer Mx + cx + kx = F = meω 2 sin ωt 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 10 Pitch & Vertical motion simple model of a car 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling ( F − ksf ( xb − aθ − x f ) − csf xb − aθ − x f ) ( ) Fc + ⎡⎣ k ( x − aθ − x ) + c ( x − aθ − x ) ⎤⎦ a − ⎡⎣ k ( x + bθ − x ) + c ( x + bθ − x ) ⎤⎦ b = I θ k ( x − aθ − x ) + c ( x − aθ − x ) − k x = m x k ( x + bθ − x ) + c ( x + bθ − x ) − k x = m x −k sr ( xb + bθ − xr ) − csr xb + bθ − xr = mb xb sf sr b f b r sf sr sf b f sf sr b r sr b f b r b b f r C f r r f f f r r −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−− −csf a + csr b −csf 0 ⎤ ⎡ xb ⎤ ⎡ csf + csr IC 0 0 ⎥⎥ ⎢⎢ θ ⎥⎥ ⎢⎢ −csf a + csr b csf a 2 + csr b 2 csf a + ⎢ −csf ⎥ ⎢ ⎥ csf a csf 0 mf 0 xf ⎥⎢ ⎥ ⎢ 0 −csr b 0 0 mr ⎦ ⎣ xr ⎦ ⎣ −csr −k sf a + k sr b − ksf −k sr ⎤ ⎡ xb ⎤ ⎡ F ⎤ ⎡ k sf + k sr ⎢ − k a + k b k a 2 + k b 2 k a − k b ⎥ ⎢ θ ⎥ ⎢ Fc ⎥ sr sf sr sf sr ⎥ ⎢ ⎥=⎢ ⎥ + ⎢ sf ⎢ −ksf k sf a k sf 0 ⎥ ⎢xf ⎥ ⎢ 0 ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ − − k k b k 0 ⎣0⎦ sr sr sr ⎦ ⎣ xr ⎦ ⎣ ⎡ mb ⎢0 ⎢ ⎢0 ⎢ ⎣0 0 0 −csr ⎤ ⎡ xb ⎤ −csr b ⎥⎥ ⎢⎢ θ ⎥⎥ 0 ⎥ ⎢xf ⎥ ⎥⎢ ⎥ csr ⎦ ⎣ xr ⎦ 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 11 EOM w/ springs in series A mass m is suspended on a massless beam of uniform flexural rigidity EI. Derive the differential EOM. 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling 192 EI L3 From the arrangement, it is connected in series with the spring k equivalent stiffness of the beam at the midspan is 192kEI 192 EI + kL3 192kEI x=0 ∴ mx + 192 EI + kL3 ∴ keq = 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 12 EOM w/ springs in parallel Devise a lumped model for the n-storey building subjected to a horizontal earthquake excitation. 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling xi +1 > xi > xi −1 ki ( xi − xi −1 ) ki +1 ( xi +1 − xi ) xi > xi +1 and xi > xi −1 ki ( xi − xi −1 ) ki +1 ( xi − xi +1 ) 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling Each column acts as clamped-clamped beam 12 EI . H3 Two columns for each storey behave like spring in parallel. 24 EI i ∴ keqi = H i3 with an end in horizontal deflection ⇒ k = Schematic model is a string of spring/mass. At each mass ⎡⎣ ∑ F = ma ⎤⎦ mi xi = ki +1 ( xi +1 − xi ) − ki ( xi − xi −1 ) , xi +1 > xi > xi −1 or ⎡⎣ ∑ F = ma ⎤⎦ mi xi = − ki +1 ( xi − xi +1 ) − ki ( xi − xi −1 ) , xi > xi +1 and xi > xi −1 t t with the constraint xo ( t ) = xo ( 0 ) + ∫ ∫ a ( t ) dt 0 0 1.3 Equations of Motion Ch. 1: Introduction of Mechanical Vibrations Modeling 1.4 Equilibrium and Linearization Linear Time Invariant (LTI) system is convenient to understand and analyzed. It can be described as the system of ordinary differential equations with constant coefficients of the form: dmx d m −1 x d 2x dx + ami x = f ( t ) a0i m + a1i m −1 + … + a( m − 2)i 2 + a( m −1)i dt dt dt dt Very often, the EOM is nonlinear which is difficult to manipulate. Linearization makes the system become LTI using the Taylor’s series expansion around an interested point. The equilibrium point is commonly chosen. 1.4 Equilibrium Ch. 1: Introduction of Mechanical Vibrations Modeling How to find the equilibrium point? The solution does not change if the system is at the equilibrium. Let that point be x = xe and at that point x = x = … = 0. Substitute into EOM and solve for xe . How to linearize the model? Apply the Taylor’s series expansion to any nonlinear expressions around xe . Assume small motion, which allows one to ignore the nonlinear terms in the series. In other words, only the constant and linear terms are remained. d 1 d2 2 − +… f ( x ) = f ( xe ) + f ( x) f x x x ( x − xe ) + ( ) ( ) e 2 2! dx dx x = xe x= x e 1.4 Equilibrium Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 13 Inverted pendulum Determine the EOM and linearize it. 1.4 Equilibrium Ch. 1: Introduction of Mechanical Vibrations Modeling l l ⎡⎣ ∑ M O = I Oα ⎤⎦ − 2k sθ × cθ + mglsθ = ml 2θ 2 2 Find the equilibrium position θ = θ e kl 2 2mg sθ e cθ e + mglsθ e = 0, sθ e = 0 or cθ e = − kl 2 Linearize about θ e = 0 for which θ = θ e + φ mg ⎛ kl 2 ⎞ l l −2k sθ × cθ + mglsθ = 0 + ⎜ − + mgl ⎟ φ 2 2 ⎝ 2 ⎠ 2k(l/2)sθ (l/2)cθ ⎛ kl 2 ⎞ ∴ ml φ + ⎜ − mgl ⎟ φ = 0, φ measured from θ = 0 ⎝ 2 ⎠ 2 2mg 4m 2 g 2 Linearize about θ e such that cθ e = , sθ e = 1 − 2 2 for which θ = θ e + φ kl k l ⎛ kl 2 6m 2 g 2 ⎞ l l −2k sθ × cθ + mglsθ = 0 + ⎜ − + ⎟φ 2 2 2 k ⎝ ⎠ ⎛ kl 2 6m 2 g 2 ⎞ −1 ⎛ 2mg ⎞ ∴ ml φ + ⎜ − ⎟ φ = 0, φ measured from θ = cos ⎜ ⎟ k ⎠ ⎝ kl ⎠ ⎝ 2 2 1.4 Equilibrium Ch. 1: Introduction of Mechanical Vibrations Modeling l l ⎡⎣ ∑ M O = I Oα ⎤⎦ − 2k θ × + mglθ = ml 2θ 2 2 ⎛ kl 2 ⎞ ∴ ml θ + ⎜ − mgl ⎟ θ = 0 ⎝ 2 ⎠ 2 mg 2k(l/2)θ (l/2) small angle approx. 1.4 Equilibrium Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 14 Determine the EOM and linearize it. 1.4 Equilibrium Ch. 1: Introduction of Mechanical Vibrations Modeling kl1θ mg small angle approx. ⎡⎣ ∑ M O = I Oα ⎤⎦ − mgl2θ − kl1θ × l1 = ml 2θ 1.4 Equilibrium Ch. 1: Introduction of Mechanical Vibrations Modeling Ex. 15 Determine the EOM and linearize it. equilibrium position 1.4 Equilibrium Ch. 1: Introduction of Mechanical Vibrations Modeling Let the equilibrium position the spring deforms by δ eq . ⎡⎣ ∑ Fy = 0 ⎤⎦ mg − kδ eq cα = 0 _____________________ (1) Let y be the displacement measured from the equilibrium, corresponding to the spring being deflected by angle θ . ⎡⎣ ∑ Fy = my ⎤⎦ mg − cy − k ( Δ + δ eq ) c (α − θ ) = my ____ ( 2 ) From the geometry, Δ is the difference of the spring length between two postures. Δ= ( h tan α ) + ( h + y ) 2 2 h h2 h − = 2 + 2hy + y 2 − cα cα cα From the geometry, h h+ y h tan α sα = s (α − θ ) ⇒ tan (α − θ ) = cα c (α − θ ) h+ y ⎡ 2 ⎤ 1 = β c c (α − θ ) = ⎢ ⎥ 2 1 + tan β ⎦ ⎣ h+ y h2 + 2hy + y 2 2 cα 1.4 Equilibrium Ch. 1: Introduction of Mechanical Vibrations Modeling Subs. the findings into ( 2 ) and recognize (1) : ⎛ h2 ⎞ h + δ eq ⎟ mg − cy − k ⎜ 2 + 2hy + y 2 − ⎜ cα ⎟ cα ⎝ ⎠ EOM: my + cy + k ( h + y ) − h+ y 2 = my h + 2hy + y 2 2 cα h+ y mg = mg − cα h2 2 2 + + hy y c 2α kh cα I h+ y h2 2 2 + + hy y c 2α II Linearization about equilibrium y = 0 ⎧ ⎪ ⎪ 2 ⎪⎪ kh kh I = kh − + ⎨k − h ⎪ cα cα cα ⎪ ⎪ ⎪⎩ ( h + y )( 2h + 2 y ) h2 2 + 2 hy + y − c 2α h2 2 2 + 2hy + y 2 cα 2 h + 2hy + y 2 2 cα ⎫ ⎪ ⎪ ⎪⎪ 2 ⎬ ( y − 0) + O ( y ) ⎪ ⎪ ⎪ ⎪⎭ y =0 I ≈ kc 2α ⋅ y 1.4 Equilibrium Ch. 1: Introduction of Mechanical Vibrations Modeling ⎧ h2 ( h + y )( 2h + 2 y ) 2 ⎪ 2 + 2hy + y − h2 ⎪ cα 2 2 2 + + hy y 2 mgh mg ⎪⎪ cα II = mg − − ⎨ h cα ⎪ h2 cα + 2hy + y 2 2 cα ⎪ cα ⎪ ⎪⎩ ⎫ ⎪ ⎪ ⎪⎪ 2 ⎬ ( y − 0) + O ( y ) ⎪ ⎪ ⎪ ⎪⎭ y =0 mg 2 s α⋅y h Subs. I and II into EOM, II ≈ mg 2 ⎞ ⎛ my + cy + ⎜ kc 2α − s α⎟y=0 h ⎝ ⎠ If α − θ ≈ α , i.e. θ is very small, which requires small enough α , then ( 2 ) becomes mg − cy − k ( Δ + δ eq ) cα = my Make use of (1) , it becomes my + cy + k Δcα = 0 Subs. Δ and linearize about y = 0 to get my + cy + kc 2α ⋅ y = 0 Note that the linearized Δ = ycα which makes sense from the figure by projecting y onto the line of spring. 1.4 Equilibrium Ch. 1: Introduction of Mechanical Vibrations Modeling 1.4 Equilibrium