Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
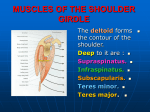
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
The Impact of a Novel Proximal Humerus Muscle Augment on Deltoid and Posterior Rotator Cuff Force Requirements and the Overall Joint Reaction Force with Reverse Total Shoulder Arthroplasty 1. 1 Hansen, M., 2Nayak, A, 2Sathia, M., 2Worhacz, K, 2Stowell, R, 2Jacofsky, M., 3Roche, C. Ortho Arizona, Gilbert, AZ. 2. The MORE Foundation, Phoenix, AZ. 3. Exactech, Inc. Gainesville, FL. [email protected] Disclosures: 3A. Hansen, M. None: Nayak, A. None: Sathia, M, None: Worchacz, K None: Stowell, R, None: Jacofsky, M, 3A. Roche, C INTRODUCTION: The geometry of the proximal humerus causes wrapping of the deltoid around the greater tuberosity, displacing the deltoid laterally and increasing the abduction moment arm of the deltoid at low abduction angles. For the intact shoulder, deltoid wrapping around the humeral greater tuberosity occurs until the shoulder reaches 48° abduction in the scapular plane (relative to a fixed scapula).1 However, with reverse total shoulder arthroplasty (rTSA), the medialization of the joint center of rotation and position of the humerus reduces that amount of deltoid wrapping, with greater reductions occurring with more humeral medialization.1 A novel proximal humeral prosthesis (deltoid muscle augment) has been designed to further lateralize the deltoid muscle line of action to increase the moment arm of that muscle and improve deltoid efficiency. The prosthesis has an approximate thickness of 15mm and is attached to the greater tuberosity on the proximal humerus and essentially focally enlarges the tuberosity without altering the rotator cuff insertions. It is hypothesized that the deltoid augment when used with rTSA will increase the deltoid moment arm to decrease deltoid, posterior cuff, and joint reaction forces as compared to the nonaugmented rTSA configuration. METHODS: A second-generation cadaver shoulder model that utilizes simulated neuromuscular control was used for this study. Stepper motors (Industrial Devices Corporation, Salem, New Hampshire) actuate cables that are attached to the rotator cuff tendons and deltoid tuberosity. Force transducers measure the tension developed in each cable as active closed-loop position and orientation control algorithms control each motor. This allows the controller to simulate in vivo glenohumeral kinematics. As presently configured, the controller utilizes active optical markers (Northern Digital, Inc., Waterloo, Ontario, Canada) to track motion, and a six-axis load cell measures the resultant joint reaction force at the glenohumeral joint. Specifically, the cable and eyelet configurations simulated the three heads of the deltoid (middle, posterior, anterior), the supraspinatus, the subscapularis, the pectoralis major, the infraspinatus, and teres minor. Six cadaveric full upper extremity male specimens (age 62.8 ± 8.8 yrs) were tested in scapular plane abduction without any artificial external constraints from 20° to 70° with full mass of the upper extremity. The tests were performed with the elbow flexed 90° to simulate the internal rotation torque associated with many ADL’s. Two conditions were tested: 42mm Equinoxe rTSA with and without the deltoid augment, both configurations had the subscapularis repaired. Five trials were performed for each condition. To simulate more-physiologic joint compression and induce more-anatomic deltoid wrapping around the greater tuberosity, a deltoid surrogate model was created. This muscle model was made from VytaFlex® 50 Liquid Urethane Rubber (Smooth-On, Inc) and physically connected to 3 cables through 3 polyethylene tubes embedded within, to route the muscle lines for the anterior, middle, and posterior deltoid to the respective eyelets as shown during the ROM. A 2 tailed unpaired students-t test with alpha set at 0.05 was utilized to compare mean muscle forces for each configuration. RESULTS: During scapular abduction with the elbow flexed, the addition of the deltoid muscle augment on the 42mm rTSA increased the deltoid abductor moment arm to decrease the posterior deltoid force, pectoralis major force, and the total deltoid force (Figure 1A) required for abduction in the scapular plane. No difference was observed in the posterior cuff force (Figure 1B); however, the mean joint reaction force (Figure 1C) decreased by 8.4% with the use of the deltoid augment, due to the associated reduction in the deltoid force requirements over the range of motion. DISCUSSION: The results of the study demonstrate that concomitant use of the proposed deltoid augment with rTSA increases the deltoid moment arm and improves deltoid efficiency, particularly of the posterior deltoid during scapular abduction. The deltoid augment may increase the life of the prosthesis by decreasing the joint reaction force and thus decreasing polyethylene wear and also the risk of acromial stress fractures and aseptic glenoid loosening. The main limitation of the study is that the set of muscle forces determined by the shoulder controller for each shoulder position is not unique: other muscle force combinations may yield the same positions. SIGNIFICANCE: A novel proximal humerus prosthesis is presented which increases the deltoid abductor moment arms to enhance shoulder biomechanics. In the setting of rTSA, the use of this augment may improve deltoid strength. In revisions of rTSA for instability, simply implanting an augment rather than replacing the prosthesis may be possible as the deltoid augment may be used to tension the deltoid independent of the rotator cuff. Further investigation is required to identify optimal deltoid augment size, shape, and position on the proximal humerus for various indications. Figure 1A-C: Comparison of deltoid force (1A, left), posterior rotator cuff force (1B, center), and joint reaction force (1C, right) required for abduction REFERENCES: 1. Roche, C. et al. HJD Bulletin Vol. 71(4):284-93. 2013. ORS 2016 Annual Meeting Poster No. 2016