Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
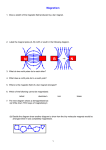
Temposonics ® Magnetostrictive Linear-Position Sensors ® SENSORS Foolproofing Embedded Sensors Technical Paper 551112 A Magnetostrictive sensors Magnetostriction as a position sensing technique has long been used in industrial machines. But another variant of this technology has emerged to handle situations that need to embed smaller sensors within a product to cut size and cost. Called magnetostrictivecore sensors, these new devices are basically conventional magnetostrictive sensors without their housing. Gelling rid of the housing lets designers embed them in applications such as sprayers, dispensing machines, fastener magazines, X-Y positioners, small presses, clamps, grippers, and many other assembly and dispensing tools. The typical approach with embeddable sensors is to use the structure of the target appliance or machine itself to protect and house the sensor, much as with any electronic component. But the closer quarters this entails forces designers to allow for external fields and physical factors that can influence sensor readings. The first thing to consider is construction material. Magnetostrictive sensors can read their position magnet even when there is a physical barrier between the position magnet and the sensor tube. This, capability also eliminates wear. A point to note is that the material directly between the position magnet and the rod should be nonferrous. Common architectural materials that allow this include plastics, composite, ceramics, aluminum, brass, most stainless steels, and anything else that cannot be magnetized. Magnetic materials can be used for overall construction as long as they don’t come between the magnet and the sensor tube. All magnetostrictive sensors should be considered a system of matched, interacting components consisting of magnets, electronics and sensing elements. The attributes of those components are selected and designed so when they act in concert, the sensor performs Waveguide Placement Magnetic Field (encompasses entire magnet) Molded Ring Magnet S N W aveguide (properly aligned, centered) W aveguide (limit of non-axial movement) Magnet Orientation OK Not OK 90° Not 90° One example of an embeddable magnetostrictive sensor is the Temposonics C-Series from MTS. Compared to industrial versions, its dimensions are smaller in every direction so it will fit into smaller spaces. The head is 45% smaller than an industrial head, for example, and the sensor shaft is more than 50% smaller. An integrated connector mates with inexpensive board-style plugs for straight or right-angle wire exits. Through holes along the axis of the sensor head allow attachment without the need for additional flanges. But embeddable versions of these sensors put the onus on the design engineer to keep the position magnet orthogonal to the waveguide. Otherwise position readings can be inaccurate. All specifications are subject to change. Contact MTS for specifications that are critical to your application. Go to www.mtssensors.com for the latest support documentation. Return-signal strength Normalized return signal Blue tube Auto SE 180 degree bend Bend Radius (mm) The waveguide on embeddable magnetostriclive sensors (blue in the photo) can be curved to sense position in applications like this. But the sensor can only tolerate so much curving - a larger radius helps improve system design margins. An example graph shows the amount of signal loss as a function of bend radius. About 60% of the signal is lost with a bend radius of about 25 mm. That 60% loss is the lower limit and defines the smallest bend radius possible. its best. That’s why some magnets - including some designed by the same manufacturer for other models of magnetostrictive sensors and any catalog magnet from an industrial supply house, probably will not work well with the sensor element and electronics. sensor tube moves from one side of the inner diameter to the other. That is because the magnet’s field strength is uniform throughout its inside diameter. However, the magnet should always be orthogonal with the sensor tube axis and as close as practical to the center of the inside diameter. The details of how the sensor installs are important because nearby ferrous material can distort and shunt magnetic fields. This, in turn, can degrade the output of the sensor. In particular, sensor linearity, signal stability, noise susceptibility and temperature range are among the qualities hampered by a bad installation. A point to note is that surrounding application structures and the material used to make them can degrade or enhance the symmetry of the magnet’s field. Manufacturers engineer field symmetry into the sensor magnets along both the travel axis and the orthogonal axes. Disrupting that symmetry can cause intermittent or permanent shifts in indicated position. And installing the magnet in ferromagnetic materials such as mild steel can disrupt the field and change its symmetry. Ring magnets Magnetostrictive sensors often use magnets configured in a donut or ring style, with the sensor element passing through a hole in the magnet. These ring magnets give the best overall performance. They are more immune to installation errors than a single bar magnet. When ring magnets must go in ferrous materials, it’s best to use nonferrous materials such as brass, aluminum, plastic, or air in the indicated kee!>’Out areas next to the ring magnet. Ferromagnetic materials that encroach into the keel>-out areas can cause shifts in indicated position, reduced temperature range, and noise susceptibility. If snap or retaining rings keep the magnet in place, they should be nonferrous if possible. But ferrous fasten ers of this sort are unlikely to be a problem because they contain little ferrous material and the shunting effect is usually small. For example, motion skew between the magnet and the sensor-tube axis is much less of a problem with ring magnets. This is because of their uniform shape and magnetic field. And it is possible to ap proximate a ring magnet with a collection of discreet magnets. Though the field is not as uniform as with a molded magnet, it still will work fine. Button or bar magnets Each ring magnet has north on the inside diameter and south on the outer diameter. Other configurations of the magnetic field won’t work. That includes south inside and north outside, or north south along the axis of the sensor. And it’s best not to use magnets from sources other than the sensor manufacturer unless that manufacturer has certified them for use. Manufacturers design magnet field strengths and shapes specifically for the sensors with which they are supposed to work. Most manufacturers will test for suitability magnets they don’t make themselves. In some installations, a ring magnet won’t fit. So manufacturers offer bar or button magnets to activate the sensor from one side of the sensor shaft. Button, bar and segment magnets have their own installation subtleties. It’s important to keep the right distance between the surface of the magnet facing the sensor and the sensor shaft. Manufacturer-supplied button or bar magnets have a prescribed optimal stand-off distance with an allowable tolerance. At this distance sensor signals hit their optimum. At points closer than that permissible range the sensor can saturate. Outside the range, magnet strength maybe too weak to generate a signal. Most sensor makers offer ring magnets with various inner and outer diameters. If the manufacturer’s standard and optional magnets don’t quite fit -more common in embedded applications -consult with the manufacturer. Be prepared to provide the maximum O.D., I.D., and width of the space you have available for the ring magnet. They will model a magnet with an optimal fit. Often you can get special magnet molded if your volume is sufficiently high. The sensor tube can sit anywhere inside the inner diameter of the ring and provide strong signals. Indicated position changes little as the Temposonics® Sensors, Foolproofing Embedded Sensors - Technical Paper 551112A It is particularly important to verify that button magnets generate enough signal for the application at hand. Also, a minimum area around the magnet diameter must be free of magnetic or ferrous material. Note also that button magnets are rarely marked. Make certain with a test fixture that north faces the sensor tube. 2 MTS Sensors For button and bar magnets, there is a general rule of thumb to use a keep-out area having a radius of about three times the magnet radius. The south-pole flat-magnet surface oriented away from the sensor tube most times can be against ferrous material. In fact, sometimes it’s better to have that area against ferrous material to act as a concentrator and throw the field out further. Typical keep-out areas Non-ferrous keep out zone equal to one half the width of the magnet and equal to the I.D. and O.D. dimensions. Routinely, ferrous materials can be fairly close to the sensor. The sensor’s tube, also called the waveguide tube, can sit within ferrous metal structures. Of course, the area surrounding the tube where the magnet traverses should not contain any ferrous material. 13 mm (0.51 in.) ferrous free zone around the sensor tube Magnet When ring magnets must go in ferrous materials, it’s best to use nonferrous materials such as brass, aluminum, plastic, or air in the keep-out areas that are next to the ring magnet. Ferromagnetic materials that encroach into the keep-out areas can cause shifts in indicated position, reduced temperature range, and susceptibility to noise. The sensor head housing can be recessed completely in a metallic structure, ferrous or nonferrous. Nonmetallic structures can house the sensor head but they offer no EMI/ESD advantages. In bar or button magnet installations, the ferrous material should not come closer to the sensor than 13 mm anywhere around the tube. And no ferrous material should come between the sensor tube and the magnet north surface. Residual magnetism Also, a gauss meter and probe can check levels if it appears the installation structure is magnetic. Generally, the keep-out areas should not have a permeability of greater than 1.05 or fields from other sources greater than 5 gauss (0.5 mT). Fields stronger than these levels should be removed via degaussing, increasing gaps, or substituting other materials. In rare instances, though the keep-out areas have been observed, residual magnetism in the structural materials can induce position shifts, reduced linearity, reduced temperature range, and noise. This can happen even in some stainless steels. Residual magnetism can arise from cold working or machining. For example, a cylinder rod that picks up magnetism from machining can change the magnetic qualities of the magnet. It may reduce the magnet’s field strength or make it become asymmetric, degrading sensor performance. Application specialists can be helpful for cracking particularly knotty problems. In some cases, most manufacturers will run tests on prototype designs to determine the impact of different configurations or changes. A degaussing of the structure can reduce or eliminate the problem. Degaussing coils, commonly used to degauss CRT screens, are simply a ring coil and a core that has ac current (usually at line voltage) passing through it. When passed over a magnetic part, the ac induced field randomizes the alignment of the magnetic domains in the material and thus reduces the magnetism. Any curved sensor installation needs special attention. It’s possible that the return signal will diminish as the curve radius gets smaller. So the sensor manufacturer should help evaluate the degree of curve, the magnet to use, and how to install the magnet. The sensor can only tolerate a certain amount of curving and still produce a viable output. It’s best to choose the largest possible radius as a way to improve the system design margins. Most curved sensor applications are forced to use some form of bar or button magnet. That’s because it’s difficult to get a ring magnet to follow a curved path when the path is defined by standoffs or a groove in the material. The magnet should maintain a specified standoff height along the curve of the sensor. The magnet path should also parallel the sensor shaft. Any deviation in standoff height or path parallelism as the magnet moves may produce a position error or reduce the effective temperature range. Troubleshooting When troubles arise, a first course of action should be to individually and incrementally raise the dimension margins. This helps identify the source and the point were the symptoms diminish or cease. This information can help the manufacturer make recommendations about fixes. MTS Sensors 3 Temposonics® Sensors, Foolproofing Embedded Sensors - Technical Paper 551112A What is magnetostiction? Magnetostriction is a property of ferromagnetic materials such as iron, nickel, and cobalt. These materials change size and/or shape when sitting in a magnetic field. This physical response of a ferromagnetic material arises because of the presence of magnetic moments, essentially a collection of tiny permanent magnets, or domains. Each domain consists of many atoms. When a material is not magnetized, the domains are randomly arranged. When the material is magnetized, the domains are oriented with their axes approximately parallel to one another and a change in size or shape along that axis is a result. Interaction of an external magnetic field with the domains also causes the magnetostrictive effect. The order of the domains, and thus the magnitude of the effect, can be influenced by alloy selection, thermal annealing, cold working, and magnetic field strength. Ferromagnetic materials used in magnetostrictive position sensors are transition metals such as iron, nickel, and cobalt. When a material has positive magnetostriction, it enlarges in a magnetic field; with negative magnetostriction, the material shrinks. Applying a magnetic field causes stress that changes the physical properties of a magnetostrictive material. However, the reverse is also true: Applying stress to a magnetostrictive material changes its magnetic properties (e.g., magnetic permeability). That is, a dimensional change in the material can lead to induced magnetic fields. Magnetostrictive sensors employ both properties to generate an ultrasonic strain wave from the location of an external marker magnet and detect its passage past a fixed reference point in a wave guide. By knowing the speed of sound in the material, marker magnet position can be determined using a time-of-flight measurement technique. First step in the time-of-flight measurement is to apply an orthogonal magnetic field to a magnetostrictive wire, and a pass a current through the wire. The magnetostrictive effect causes a twisting at the location of the orthogonal magnetic field. The twisting is caused by interaction of the orthogonal magnetic field, usually from a permanent marker magnet, with the magnetic field along the magnetostrictive wire, which is present because of the current in the wire. The current is applied as a pulse, so the mechanical twisting travels in the wire as an ultrasonic wave. Each magnetostrictive strain wave travels at the speed of sound in the waveguide material, approximately at 3,000 m/sec. The position magnet is attached to whatever is being measured. The waveguide wire, enclosed within a protective cover, is attached to the stationary part of the machine. Movable Position Magnet Magnetic field encompasses entire waveguide - generated by interrogation pulse Interrogation: Return Wire Waveguide Magnetic Field from Position Manget Interaction of magnetic fields causes waveguide to generate a strain pulse Pulse Output Strain Pulse Detector Ferromagnetic material Waveguide twist Current director Position magnet Magnetostriction principle of operation Location of the position magnet can be determined by starting a counter timer when the current pulse is launched. The current pulse causes a sonic wave to be generated at the location of the position magnet. The sonic wave travels along the waveguide until it is detected by the pickup. The pickup output voltage stops the counter timer. Elapsed time indicated by the timer represents the distance between the position magnet and the pickup. The frequency of the counter determines the resolution of the measurement. The higher the frequency, the finer the resolution. Finally, electronics conditions the elapsed time information into the desired output such as a de voltage. pulse-width modulation, and so forth. Published date: 2007 Part Number: 12-07 551112 Revision A MTS and Temposonics are registered trademarks of MTS Systems Corporation. All other trademarks are the property of their respective owners. All Temposonics sensors are covered by US patent number 5,545,984. Additional patents are pending. Printed in USA. Copyright © 2007 MTS Systems Corporation. All Rights Reserved in all media. ® SENSORS UNITED STATES MTS Systems Corporation Sensors Division GERMANY MTS Sensor Technologie GmbH & Co. KG JAPAN MTS Sensors Technology Corporation 3001 Sheldon Drive Cary, NC 27513 Tel: (800) 633-7609 Fax:(919) 677-0200 (800) 498-4442 www.mtssensors.com [email protected] Auf dem Schüffel 9 D - 58513 Lüdenscheid Tel: +49 / 23 51 / 95 87-0 Fax: +49 / 23 51 / 56 491 www.mtssensor.de [email protected] Ushikubo Bldg. 737 Aihara-cho, Machida-shi Tokyo 194-0211, Japan Tel: +81 (42) 775 / 3838 Fax: +81 (42) 775 / 5516 www.mtssensor.co.jp [email protected]