Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
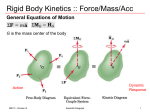
Example (1) on Journal Bearing ME101 - Division III Kaustubh Dasgupta 1 Example (1) on Journal Bearing • Impending motion ME101 - Division III Kaustubh Dasgupta 2 Example (1) on Journal Bearing ME101 - Division III Kaustubh Dasgupta 3 Example (2) on Journal Bearing (a) For equal tension on both sides, contact point is A; for slight rotation of the pulley, under increased P, the contact point shifts to B. Friction circle radius, ME101 - Division III Kaustubh Dasgupta 4 Example (2) on Journal Bearing (b) With reduction of P, contact point shifts to C. Free body diagram of pulley with moment @ C, ME101 - Division III Kaustubh Dasgupta 5 Example (2) on Journal Bearing (c) P, W and R must be concurrent. R is also the tangent to the friction circle ME101 - Division III Kaustubh Dasgupta 6 Applications of Friction in Machines Belt Friction Impending slippage of flexible cables, belts, ropes over sheaves, wheels, drums It is necessary to estimate the frictional forces developed between the belt and its contacting surface. Consider a drum subjected to two belt tensions (T1 and T2) M is the torque necessary to prevent rotation of the drum R is the bearing reaction r is the radius of the drum β is the total contact angle between belt and surface (β in radians) T2 > T1 since M is clockwise ME101 - Division III Kaustubh Dasgupta 7 Applications of Friction in Machines Belt Friction: Relate T1 and T2 when belt is about to slide to left Draw FBD of an element of the belt of length r dθ Frictional force for impending motion = μ dN Equilibrium in the t-direction: μdN = dT (cosine of a differential quantity is unity in the limit) Equilibrium in the n-direction: (For the fig. T1 > T2) dN = 2Tdθ/2 = Tdθ (sine of a differential in the limit equals the angle, and product of two differentials can be neglected) Combining two equations: Integrating between corresponding limits: • • • T2 = T1 e μβ (T2 >T1; e = 2.718…; β in radians) Rope wrapped around a drum n times β = 2πn radians r not present in the above eqn eqn valid for non-circular sections as well In belt drives, belt and pulley rotate at constant speed the eqn describes condition of impending slippage. ME101 - Division III Kaustubh Dasgupta 8 Example (1) on Belt Friction Examples: Belt Friction A force P is reqd to be applied on a flexible cable that supports 100 kg load using a fixed circular drum. μ between cable and drum = 0.3 (a) For α = 0, determine the max and min P in order not to raise or lower the load (b) For P = 500 N, find the min α before the load begins to slip Solution: Impending slippage of the cable over the fixed drum is given by: T2 = T1 e μβ Draw the FBD for each case (a) μ = 0.3, α = 0, β = π/2 rad For impending upward motion of the load: T2 = Pmax; T1 = 981 N Pmax/981 = e0.3(π/2) Pmax = 1572 N For impending downward motion: T2 = 981 N; T1 = Pmin 981/Pmin = e0.3(π/2) Pmin = 612 N (b) μ = 0.3, α = ?, β = π/2+α rad, T2 = 981 N; T1 = 500 N 981/500 = e0.3β 0.3β = ln(981/500) β = 2.25 rad β = 2.25x(360/2π) = 128.7o α = 128.7 - 90 = 38.7o ME101 - Division III Kaustubh Dasgupta 9 Example (2) on Belt Friction ME101 - Division III Kaustubh Dasgupta 10 Example (2) on Belt Friction (a) Impending slippage of the hawser gives the application of the equation T2 = T1 e μβ T1 = 150 N, T2 = 7,500 N, β = 22π rad = 12.57 rad μ = 0.311 (b) For 3 turns of the hawser, β = 32π rad = 18.85 rad T1 = 150 N, μ = 0.311 Using T2 = T1 eμβ, T2 = 52.73 kN ME101 - Division III Kaustubh Dasgupta 11 Example (3) on Belt Friction ME101 - Division III Kaustubh Dasgupta 12 Example (3) on Belt Friction Slippage will first occur for pulley B since the angle β is smaller as compared to pulley A (for the same μ) For pulley B, T2 = 600 lb, β = 120 = 2π/3 rad μ = 0.25 T1 = 355.4 lb ME101 - Division III Kaustubh Dasgupta 13 Example (3) on Belt Friction Free body diagram of pulley A ME101 - Division III Kaustubh Dasgupta 14 Friction in Machines :: Wheel Friction Steel is very stiff Significant Rolling Resistance Large Rolling Resistance Low Rolling Resistance between rubber tyre and tar road due to wet field Wheel Friction or Rolling Resistance Resistance of a wheel to roll over a surface is caused by deformation between two materials of contact. This resistance is not due to tangential frictional forces Entirely different phenomenon from that of dry friction ME101 - Division III Kaustubh Dasgupta 15 Friction in Machines :: Wheel Friction Rigid cylinder rolling at a constant velocity along a rigid surface Rigid Rigid - Normal force exerted by the surface on the cylinder acts at the tangent point of contact - No Rolling Resistance Actually materials are not rigid W θ - Deformation occurs at the contact region - Reaction of surface on the cylinder consists of a distribution of contact pressure. ME101 - Division III Kaustubh Dasgupta 16 Applications of Friction in Machines θ W Consider a wheel under action of a load W on axle and a force P applied at its center to produce rolling Deformation of wheel and supporting surface Resultant R of the distribution of normal pressure must pass through wheel center for the wheel to be in equilibrium (i.e., rolling at a constant speed) R acts at point A on right of wheel center for rightwards motion Force P reqd to maintain rolling at constant speed can be appx estimated as: ∑MA = 0 Wa = Prcosθ (cosθ ≈ 1 deformations are very small compared to r) P a W rW μr is called the Coefficient of Rolling Resistance r •μr is the ratio of resisting force to the normal force analogous to μs or μk •No slippage or impending slippage in interpretation of μr ME101 - Division III Kaustubh Dasgupta 17 Applications of Friction in Machines Examples: Rolling Resistance A 10 kg steel wheel (radius = 100 mm) rests on an inclined plane made of wood. At θ=1.2o, the wheel begins to roll-down the incline with constant velocity. Determine the coefficient of rolling resistance. Solution: When the wheel has impending motion, the normal reaction N acts at point A defined by the dimension a. Draw the FBD for the wheel: r = 100 mm, 10 kg = 98.1 N a Using simplified equation directly: P W rW r Here P = 98.1(sin1.2) = 2.05 N W = 98.1(cos1.2) = 98.08 N Coeff of Rolling Resistance μr = 0.0209 Alternatively, ∑MA = 0 98.1(sin1.2)(r appx) = 98.1(cos1.2)a (since rcos1.2 = rx0.9998 ≈ r) a/r = μr = 0.0209 ME101 - Division III Kaustubh Dasgupta 18 Center of Mass and Centroids Concentrated Forces: If dimension of the contact area is negligible compared to other dimensions of the body the contact forces may be treated as Concentrated Forces Distributed Forces: If forces are applied over a region whose dimension is not negligible compared with other pertinent dimensions proper distribution of contact forces must be accounted for to know intensity of force at any location. Area Distribution Ex: Water Pressure Line Distribution (Ex: UDL on beams) ME101 - Division III Kaustubh Dasgupta Body Distribution (Ex: Self weight) 19 Center of Mass and Centroids Center of Mass A body of mass m in equilibrium under the action of tension in the cord, and resultant W of the gravitational forces acting on all particles of the body. - The resultant is collinear with the cord Suspend the body from different points on the body - Dotted lines show lines of action of the resultant force in each case. - These lines of action will be concurrent at a single point G As long as dimensions of the body are smaller compared with those of the earth. - we assume uniform and parallel force field due to the gravitational attraction of the earth. The unique Point G is called the Center of Gravity of the body (CG) ME101 - Division III Kaustubh Dasgupta 20 Center of Mass and Centroids Determination of CG - Apply Principle of Moments Moment of resultant gravitational force W about any axis equals sum of the moments about the same axis of the gravitational forces dW acting on all particles treated as infinitesimal elements. Weight of the body W = ∫dW Moment of weight of an element (dW) @ x-axis = ydW Sum of moments for all elements of body = ∫ydW From Principle of Moments: ∫ydW = ӯ W x xdW W y ydW W z zdW W Numerator of these expressions represents the sum of the moments; Product of W and corresponding coordinate of G represents the moment of the sum Moment Principle. ME101 - Division III Kaustubh Dasgupta 21 Center of Mass and Centroids Determination of CG xdW x W y ydW W z zdW W Substituting W = mg and dW = gdm x xdm m y ydm m z zdm m In vector notations: Position vector for elemental mass: r xi yj zk Position vector for mass center G: r xi yj zk rdm r m The above equations are the components of this single vector equation Density ρ of a body = mass per unit volume Mass of a differential element of volume dV dm = ρdV ρ may not be constant throughout the body x xdV dV ME101 - Division III y ydV dV z zdV dV Kaustubh Dasgupta 22 Center of Mass and Centroids Center of Mass: Following equations independent of g xdm x ydm y zdm z rdm r xdV x dV ydV y dV zdV z dV m m m m They define a unique point, which is a function of distribution of mass This point is Center of Mass (CM) CM coincides with CG as long as gravity field is treated as uniform and parallel CG or CM may lie outside the body CM always lie on a line or a plane of symmetry in a homogeneous body Right Circular Cone CM on central axis ME101 - Division III Half Right Circular Cone CM on vertical plane of symmetry Kaustubh Dasgupta Half Ring CM on intersection of two planes of symmetry (line AB) 23