Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Aphelion (software) wikipedia , lookup
Fluorescence correlation spectroscopy wikipedia , lookup
Surface plasmon resonance microscopy wikipedia , lookup
Magnetic circular dichroism wikipedia , lookup
Night vision device wikipedia , lookup
Ultraviolet–visible spectroscopy wikipedia , lookup
Image intensifier wikipedia , lookup
Carl Zeiss AG wikipedia , lookup
Optical aberration wikipedia , lookup
Super-resolution microscopy wikipedia , lookup
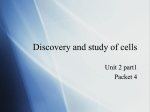
Bioimaging 6 (1998) 138–149. Printed in the UK PII: S0966-9051(98)95425-9 TECHNICAL NOTE Quantitative evaluation of light microscopes based on image processing techniques L R van den Doel†, A D Klein, S L Ellenberger, H Netten, F R Boddeke, L J van Vliet and I T Young Pattern Recognition Group, Faculty of Applied Sciences, Lorentzweg 1, Delft University of Technology, NL-2628 CJ Delft, The Netherlands Submitted 5 June 1998, accepted 25 June 1998 Abstract. In this note we will present methods based on image processing techniques to evaluate the performance of light microscopes. These procedures are applied to three different ‘high-end’ light microscopes. Tests are carried out to measure the homogeneity of the illumination system. From these tests it follows that Köhler illuminated images can have an exceedingly high amount of shading. Another result found from the illumination calibration is that traditional lamp housings are not designed to make fine-tuning easy. Next, the (automated) stage is considered. Several tests are performed to measure the stage motion in the xy-plane and in the axial direction to address accuracy, precision, and hysteresis effects. Finally, the entire electro-optical system is characterized by measuring the optical transfer function (OTF) at wavelengths 400 nm, 500 nm, 600 nm, and 700 nm. The results of these experiments show that there is a consistent deviation from the theoretical OTF at wavelengths around 400 nm. The final conclusion is that modern light microscopes perform better than their five-to-ten-year-old predecessors. Keywords: quantitative microscopy, calibration methods, digital image processing 1. Introduction When using a (light) microscope as a quantitative instrument, careful calibration and testing are essential to achieve proper results. A complete calibration of an advanced microscope system would include, besides the calibration of the microscope system itself as presented in this note, a calibration of the charge coupled device (CCD) camera mounted on the microscope as well [1]. This study concentrates on the illumination system, the stage, and the electro-optical system of a microscope. For fluorescence microscopy applications it is necessary that as much light as possible is passed through the optical system and that the field-of-view is evenly illuminated. We have developed image processing tools to calibrate the illumination system in terms of the signal-to-noise ratio, shading, and the position of maximum intensity. These measurements use a quadratic intensity profile as an approximation to the light † E-mail address: [email protected] c 1998 IOP Publishing Ltd 0966-9051/98/030138+12$19.50 intensity distribution in the field of view. A series of experiments have been performed to measure the motion characteristics of the (automated) stage. The calibration of the stage is performed in terms of hysteresis (in both planar and axial directions), the focus position as a function of the stage position, and stability. The last two tests exploit focus functions [2]. A complete calibration procedure of the automated z-axis, including axial resolution, can be found in [3]. Finally, the electro-optical system is characterized for various objectives and for four test wavelengths in terms of the optical transfer function (OTF). All experiments described in this note are performed on three different ‘high-end’ microscope systems. All three systems will be described in section 2.1. In order to perform all the experiments two different microscope test slides were needed. These will be described in section 2.2. All test procedures, including the results and the conclusions, will be described in section 3. Quantitative evaluation of light microscopes 2. Materials 2.1. Microscope systems All calibration and test procedures are applied to three different light microscopes: a Zeiss Axioskop (in our laboratory since 1993), a Zeiss Axioplan (1997), and a Leitz Aristoplan (in our laboratory since 1991). The Zeiss Axioskop has a fully automated xyz-stage (Ludl Electronics Products Ltd, Hawthorne, NY, USA). The Zeiss Axioplan can be regarded as a completely digital microscope: objective revolver, reflector turret, and condenser aperture, for instance, can be adjusted by computer. The Zeiss Axioplan used in this study, however, has only an automated z-axis. This implies that a number of procedures could neither be implemented nor automated for this microscope. The Leitz Aristoplan has a fully automated xyz-stage (Mac4000, Märzhäuzer, Wetzlar, Germany). A KAF Photometrics Series 200 CCD camera can be mounted on both Zeiss microscopes. The array of the CCD element contains 1317 × 1035 pixels with a pixel size of 6.8 × 6.8 µm2 . This camera is Peltier-cooled to −42 ◦ C. Due to this cooling and a slow readout rate (500 kHz), this camera is photon limited. The characteristics of this camera in terms of signal-to-noise ratio are excellent [1]. This camera is connected via a NuBus interface to a computer. A Sony XC-77RRCE CCD camera is mounted on the Leitz Aristoplan. The CCD array contains 756 × 581 pixels with a pixel size of 11.0 × 11.0 µm2 , and this camera is not cooled. The Sony camera is connected to a computer via a Data Translation frame grabber. An Apple Macintosh Quadra 840AV computer takes care of the microscope control and the image acquisition. Both the cameras and the microscopes can be controlled from within the environment of an image processing package; this package is SCIL Image (TNO Institute of Applied Physics (TPD), Delft, The Netherlands, e-mail address: [email protected]). 2.2. Test slides Two different test slides were used in this study. For the calibration of the epi-illumination an ALTUGLAS 127.34000 Fluo green (Atochem Departement ALTUGLAS, 4 cours Michelet - La Defense 10 Cedex 42-92091 Paris, France) was used. This slide is 75 × 25 mm2 and about 3 mm thick and is a homogeneous distribution of fluorescent molecules embedded in a plastic matrix. As a result, a uniform distribution of excitation light produces a uniform distribution of fluorescent, emission light. The second test slide, which will be referred to as the HCM slide (Opto-Line Corporation, Andover, MA, USA) is used for various tests. This slide has a number of features. • A grid of fiducial marks. The HCM slide contains four rows labeled from A to D, each row containing a series of 12 fiducial marks labeled from A to L. The distance AE AF AG AH AI AJ BE BF BG BH BI BJ CE CF CG CH CI CJ DE DF DG DH DI DJ Figure 1. Part of the HCM slide. The top row, A, contains transparent density filters with squares and circles, the middle row, B, contains opaque density filters with squares and circles, and the bottom row, C, contains empty density filters. Furthermore, the fiducial marks are shown labeled AE to DJ. At CF and BG the fiducial marks are replaced by stage micrometers. between two successive fiducial marks on a row is 4.5 mm. The distance between two successive fiducial marks on a column is 6.0 mm. The fiducial marks consist of two perpendicular lines intersecting each other in their middle. The lines have a length of 0.2 mm and are 1 µm thick. The horizontal lines of the fiducial marks along a row lie on the same line. The same holds for the vertical lines. Two stage micrometers have replaced the fiducial marks at ‘coordinate positions’ BG and CF. The fiducial marks are used to check the alignment of the camera, and the slide with respect to the stage. Furthermore, this grid of fiducial marks is used to measure if the xy-plane of the stage is perpendicular to the optical axis, and to test the motion characteristics of the stepper motors. • A row of optical density filters without pattern. These filters are of size 3 × 3 mm2 , have transmission values in the range 5%, 10%, . . . , 90%, and 100%, and are used for the calibration of the trans-illumination. • Two rows of density filters with patterns. These filters are of size 3 × 3 mm2 , their upper half containing squares with sizes 10 × 10 µm2 with an inter-square distance of 5 µm and their lower half containing circles with diameter 10 µm with an inter-circle distance of 5 µm. In row A the background pattern is transparent and the squares and circles have transmission values in the range 5%, 10%, . . . , 90%, and 100%. In row B the background pattern is opaque and the squares and circles have transmission values in the range 5%, 10%, . . . , 90%, and 100%. The two-dimensional patterns are used to measure the sampling density in pixels µm−1 . A part of the HCM slide is shown in figure 1. 139 L R van den Doel et al -400 -200 0 400 200 400 300 3400 200 200 3200 0 3000 -200 2800 100 100 2600 -400 -400 -200 0 (a) 200 400 -400 -200 0 200 -200 400 0 200 (c) (b) Figure 2. (a) The image of an empty field showing the shading, (b) the quadratic surface fit through the image, (c) the statistical distribution of the error, which is the distribution of the difference between the empty image and the quadratic surface. (The histogram is based on a reduced image (100 × 100 pixels).) 2.3. Transmission filters The characterization of the electro-optical system by means of measuring the OTF (λ) requires near-monochromatic light. For this purpose four narrow-bandpass interference filters are used, each with a bandwidth of 10 nm. The center wavelengths of these filters are 400 nm, 500 nm, 600 nm, and 700 nm (Andover Corporation, Salem, NH, USA). 3. Procedures In this section the variety of test procedures that use digital image processing techniques will be described and the results of these procedures applied to the different microscope systems will be shown. 3.1. Illumination calibration For fluorescence (epi-illumination) as well as for bright field (trans-illumination) microscopy it is essential that the field of view is evenly illuminated. Furthermore, for fluorescence microscopy it is necessary that as much light as possible is passed through the optical system. The second demand can be measured by computing the signal-to-noise ratio (SNR) of the total electro-optical system. The SNR is defined as [1]: µ SNR = 20 log dB (1) σ in which µ is the average brightness in the digital image and σ is the standard deviation of the image brightnesses defined by σ2 = 140 N M X 1 1 X (I1 [m, n] − I2 [m, n])2 . 2 MN m=1 n=1 (2) In formula (2) it is assumed that both images consist of M × N pixels. Since these images are not yet corrected for possible non-uniform shading effects, two digital images, I1 [m, n] and I2 [m, n], are recorded and the pixel-to-pixel difference is used to estimate the noise variance in the images. Doing this, systematic spatial variations are ‘subtracted out’. The average value can be estimated either by taking the average over the M × N pixels in the image or by taking the maximum brightness in the image. The former approach will be affected by the possible shading and will, in general, lead to an underestimate of the average. The latter approach will be more reliable, but occasionally subject to outliers or defective camera pixels. In practice, it is difficult to achieve uniform illumination as is illustrated in figure 2(a). The distribution of the light intensity, however, can be assumed to have a quadratic form given by Iqs (x, y) = β1 + β2 x + β3 y + β4 xy + β5 x 2 + β6 y 2 . (3) The approach in the illumination calibration is to fit this light distribution through an empty image or a socalled white image as shown in figure 2(a). This fit is based on least-squares estimators. Given an image I [m, n] it is possible to derive an analytical expression for the parameters β1 , . . . , β6 . In order to find least-squares estimators for the parameters β1 , . . . , β6 the following expression must be minimized: N M X X (I [m, n] − Iqs [m, n])2 . (4) m=1 n=1 The parameters then follow by differentiating this expression with respect to the parameters β1 , . . . , β6 and setting the result equal to zero. This results in a set of six equations, which look like (formula (4) differentiated with Quantitative evaluation of light microscopes Table 1. Results of the intensity check for microscopes and modalities. respect to β4 ) β1 S(m, n) + β2 S(m2 , n) + β3 S(m, n2 ) + β4 S(m2 , n2 ) N M X X +β5 S(m3 , n) + β6 S(m, n3 ) = mnI [m, n] (5) Absorption m=1 n=1 where S(mp , nq ) = M X N X mp m=1 nq (6) n=1 is the product of two independent summations, for which expressions can be found in terms of M and N . This set of equations can be written in matrix notation β = A(M, N )I 0 , with β = (β1 , . . . , β6 )T , A(M, N) is a 6 × 6 matrix containing elements of the form of (6) and is just a function of the image size (M ×N pixels), and I 0 is a vector of the form of the right-hand side of (5). The description until now has been the standard procedure for quadratic regression [4]. Before inverting the matrix A(M, N ), however, it is illustrative to have a closer look at its elements. Instead of summing over an asymmetric interval from 1 to 2K +1 (2K +1 elements), one can also sum over a symmetric interval from −K to K (2K + 1 elements). This corresponds to a translation of the origin in the image from the upper left corner to the center of the image. Notice the following: K X k s = (−K)s + (−K + 1)s + · · · k=−K · · · + (K − 1)s + K s = 0 K X s = 1, 3 (7) k s = (−K)s + (−K + 1)s + · · · k=−K · · · + (K − 1)s + K s = 2 K X ks s = 2, 4. (8) k=0 In (7) the terms disappear pairwise, whereas in (8) the terms appear exactly twice. The consequence of summing over a symmetric interval is that a number of elements of A(M, N ) become zero: each element with p or q odd. For p or q even, expressions can be found [5]. The inverse matrix A−1 (M, N ) now contains only ten non-zero elements. It is now possible to compute the parameters β1 , . . . , β6 . The result of such a fit is shown in figure 2(b). Also shown in this figure is the histogram of the error between the camera image and the fitted quadratic intensity distribution. Having fitted a quadratic intensity distribution, the highest intensity (Imax ) can be found by solving for the extremum of formula (3). The lowest intensity (Imin ) can be computed along the border of the fitted intensity distribution. Furthermore, the amount of shading in the image and the root-mean-square (RMS) residual error can be calculated. The shading gives information about the homogeneity of the illumination in the image and the RMS is a measure for the quality of the fit. The amount of Fluorescence Microscope CV (%) SNR (dB) Leitz Aristoplan Zeiss Axioskop Zeiss Axioplan Leitz Aristoplan Zeiss Axioskop Zeiss Axioplan 0.76 0.64 0.73 1.80 1.14 0.74 42.0 43.9 42.7 34.9 38.8 42.7 shading in the recorded field of view can be calculated from the highest and lowest intensities as follows: shading = Imax − Imin × 100%. Imax (9) In the ideal situation Imax is positioned in the center of the image at coordinates (x = 0, y = 0). The position of Imax can be computed by manipulating (3). The goal of uniform illumination is to have as little shading as possible, i.e. Imin is as close as possible to Imax . The RMS is given as a percentage of the maximum intensity in the fit and is defined as PN P 2 1/2 ((1/MN ) M m=1 n=1 (I [m, n] − Iqs [m, n]) ) RMS = Imax ×100. (10) Note that noise (e.g. photon noise and/or electronic noise) also has its effect on the RMS value. Using the positioning controls on the lamp housing it should be possible to center the maximum intensity and to improve the homogeneity of the illumination by reducing the shading as defined in formula (9). The calibration of the illumination starts with an intensity check for which the results are shown in table 1. The microscope lamps are centered and focused by using the Köhler procedures as described in the respective manuals of the microscopes. In this study 40× objectives are used. The standard deviations, σ , as defined in formula (2) are used for the calculation of the coefficient of variation (CV = σ/µ×100%) and are given as a percentage of the respective maximum intensities, µ, in each image. After the intensity check a uniformity check is performed and some typical results are given in table 2. Note that the shading percentages, as they are shown here, should not be directly compared as they do not represent the same-size field of view. Two choices are available: one option is to standardize the size of the field of view to compare the different microscopes. The second option is to describe each microscope in terms of its specific shading. In table 2 the latter option is shown. In figure 3 an illustrative comparison is shown. The intensity distributions (given as a percentage of the maximum intensity) have about the same amount of shading in the recorded images (1000 × 1000 pixels) as defined 141 L R van den Doel et al Table 2. Results of the uniformity check. Absorption Fluorescence Microscope Image size (µm2 ) Max. position Shading (%) RMS (%) Leitz Aristoplan Zeiss Axioskop Zeiss Axioplan Leitz Aristoplan Zeiss Axioskop Zeiss Axioplan 122 × 122 172 × 172 68 × 68 122 × 122 172 × 172 68 × 68 (−1.20; 0.03) (−0.45; 4.66) (−0.43; −0.30) (5.11; −1.20) (2.37; −3.03) (3.49; −0.63) 4.52 17.48 16.31 6.85 27.70 16.67 1.96 1.64 1.71 2.05 1.53 1.69 -500 -500 0 0 500 100 100 500 100 90 90 90 500 m pos. (pixels) m pos. ) els 0 0 80 -500 500 (pix ) els (pix -500 (pixels) os. os. np np m pos. -500 -50 0 100 50 100 75 90 75 0 50 x pos. (µm) m) x pos. (µ ) (µm ) (µm 50 -50 50 os. os. m) 0 50 100 yp yp x pos. (µ 0 80 500 0 -50 -50 (pixels) -50 0 50 50 Figure 3. The top-left intensity distribution in an image with 1000 × 1000 pixels has about the same amount of shading as the top-right intensity distribution. The left image corresponds to a field of view of 68 × 68 µm2 , whereas the right image corresponds to a field of view of 172 × 172 µm2 . When the image size is converted to a standard field of view of 100 × 100 µm2 as shown in the bottom-left and bottom-right distributions, it is clear that the left distribution shows much more shading than the right distribution. The center images (top and bottom) show the value of the fitted surface along the line Iqs [m, n = 0]. in formula (9), but in a standardized field of view of 100 × 100 µm2 the left distribution has much more shading than the right distribution. The RMS values in table 2 show that the quadratic fit to the shading is quite good. The value that is calculated according to formula (10) can be regarded as the standard deviation of the histogram shown in figure 2(c). The standard deviation in this histogram, which is composed of the error in the quadratic model plus the inherent noise 142 in the image, can be almost entirely attributed to the image noise as it is comparable to the noise value found in the SNR calculation. As suggested above, measurements were also performed to follow the position of maximum intensity as the lamp was moved. This was achieved by turning the lamp positioning controls on the lamp housing and following the position of Imax . A characteristic graph of these measurements is shown in figure 4. 60 y-position y-position Quantitative evaluation of light microscopes 50 max. shading: 40 60 50 40 min. shading: -60 -50 -40 -30 -20 30 30 20 20 10 10 -10 (a) 10 20 x-position -30 -20 -10 10 (b) 20 30 x-position Figure 4. Effects of changing the lamp adjustment controls. The graphs show the movement of the position of the maximum intensity in the xy-plane when either the lateral (a) or the vertical (b) position is manually changed. The gray values of the arrows indicate the amount of shading. 3.2. Sampling density and component alignment When measuring the sampling density in the x and y directions it is important that the coordinate system of the camera and the pattern on the slide are aligned. Furthermore, measuring the stage characteristics requires that the coordinate system of the camera and the coordinate system of the stage are aligned. Three rotation angles can be defined: first, the angle of the slide with respect to the camera, denoted by αcam-sl , second, the rotation angle of the stage with respect to the camera, αcam-st ; and finally, the rotation angle of the slide with respect to the stage, αst-sl . By definition, αcam-st + αst-sl = αcam-sl . (11) Two rotation angles can be measured with respect to the frame of the camera: αcam-sl and αcam-st . The first angle can be measured in a single image of one of the fiducial marks of the HCM slide as shown in figure 5. First, the fiducial mark is skeletonized into a one-pixel thick object with one branch point. This branch point and its eightconnected neighbors are removed, resulting in two pairs of lines. Two straight lines are then fitted to the two remaining pairs of lines of the skeleton using least-squares estimators. Doing this the fiducial is completely defined by the subpixel intersection point of the two lines and both slopes. The slopes of the lines define the rotation angle of the slide with respect to the camera. In order to measure the rotation angle of the stage relative to the camera, the movements of the stage need to be related to the movements of the intersection point of the fiducial mark in a series of images. The remaining rotation angle follows then from formula (11). When the camera and the slide are aligned, the sampling densities in the x and y directions can be measured. For this purpose an area with circles or squares of the HCM slide is used. Figure 5. A 150 × 150 image of part of a fiducial mark. The white lines are the result of the skeleton operation. The computed intersection point is (75.14, 85.74), and the slopes of the two lines are 0.000 34 (θ = 0.02◦ ) for the horizontal line and −495.3 (θ = −89.88◦ ) for the vertical line. (The origin is in the top left corner.) First, after acquisition of an image with either squares or circles, the objects connected to the border of the image are removed. The coordinates of the centers of gravity are computed for the remaining objects. From the description of the HCM slide the distance between two objects is known to be 15 µm in both the x and y directions. From the list of coordinates the sampling 143 L R van den Doel et al Table 3. Results of the sampling density measurements. Microscope Objective Magnification relay lens Sampling density (pixels µm−1 ) Nyquist frequency (λ = 400 nm) (pixels µm−1 ) Leitz Aristoplan Zeiss Axioskop Zeiss Axioskop Zeiss Axioplan 40×/1.30/oil 40×/1.30/oil 40×/0.75/— 40×/0.75/— 1× 1× 2.5× 2.5× 4.09(±0.1%) 5.57(±0.02%) 14.11(±0.004%) 14.58(±0.007%) 13.0 13.0 7.5 7.5 density in both the x and y directions in pixels µm−1 can be computed multiple times in a single image. This sequence is repeated a (chosen) number of times and each time the stage is shifted a small random distance either automatically or manually. The results are then averaged. This method is fast, because it uses a very simple algorithm, complete, because it measures the sampling density in both directions per image, and accurate, because the sampling density can be computed multiple times per image. Some of the results of this measurement procedure are given in table 3. The measurements were performed with two different relay lenses and two different 40× objectives. The sampling density values in both directions were equal indicating ‘square pixels’. For a diffraction-limited objective the maximum spatial frequency can be determined and the minimum sampling density (frequency) according to the Nyquist sampling theorem [6–8] is given by fs > fNyquist = 4NA . λ (12) As can be seen in table 3, the combination oilimmersion objective, the 1× relay lens, and the camera do not lead to a sufficient sampling density. Both of the sampling frequencies are less than the critical Nyquist frequency of 13.0 pixels µm−1 . 3.3. Stage characterization 3.3.1. Planar stage motion. One of the procedures for the characterization of the stage is the measurement of the planar xy motion of the stage. The basic procedure as well as the results are described here. The measurements were performed using a 40× objective. The goal of this experiment is to measure the hysteresis of the stepper motors. This is done by moving the stage back and forth over an increasing distance 1x and measuring the error between the defined distance and the measured distance. The experiment starts with one of the fiducial marks at the left-hand side of an image. It is known that the final movement of the stage has been in the positive x direction. In that image the coordinates of the intersection point of the fiducial mark are determined. Then the stage is moved over a distance 1x in the positive x direction such that the fiducial mark remains in the camera field of view. The 144 Table 4. Planar hysteresis for the Leitz Aristoplan and the Zeiss Axioskop. Microscope Hysteresis (blue) (µm) Hysteresis (red) (µm) Leitz Aristoplan Zeiss Axioskop 1.13 0.39 1.27 0.35 subpixel crosspoint is again determined. Note that this is a hysteresis-free movement in the positive direction. Now the stage is moved in the negative x direction and once again the crosspoint in the image is determined. A certain amount of hysteresis (in the negative x direction) is expected in this movement. The algorithm is also performed in the negative x direction to determine the hysteresis in the positive direction. The results of these experiments are shown in figure 6. Since the Ludl stepper motors (and the Märzhäuser stepper motors) are not perfectly identical, these experiments should also be performed in the y direction. The Zeiss Axioplan microscope is only equipped with a motor in the axial direction, therefore no hysteresis measurements in the planar directions could be performed. In figure 6 the hysteresis can be seen as the average distance between the blue and the red curve. The trend indicated by the dashed lines is the result of a positioning error. When the stage moves over a defined distance of 1 µm, it actually moves a little less. This error is cumulative and the slope is 0.5 µm in 60 µm or 0.8% in the top graph of figure 6. Another feature that can be seen in figure 6 is the periodic behavior of the error. The period of 20 µm equals the length of one full motor revolution of the stepper motor. Similar graphs were obtained for the Leitz Aristoplan. The measured planar hysteresis for both directions for the two microscope systems is given in table 4. The hysteresis in the first column corresponds to the blue curve in the top graph of figure 6, whereas the hysteresis in the second column of table 4 corresponds to the red curve in the bottom graph of figure 6. 3.3.2. Axial position. By moving the stage along every fiducial mark on the HCM slide and measuring the in-focus position of every mark, a z(x, y) surface can be found [3]. Figure 7 shows the results for the three microscope systems. measured error in µm. Quantitative evaluation of light microscopes 0.75 0.5 0.25 ∆x 20 -0.25 60 ∆x in µm. 40 −∆x -0.5 measured error in µm. -0.75 0.75 0.5 0.25 ∆x 20 -0.25 60 ∆x in µm. 40 −∆x -0.5 -0.75 Figure 6. For the Zeiss Axioskop with the Ludl motorized stage, the two graphs show errors with and without hysteresis. In the top graph the initial position is always approached in the positive x direction. In the bottom graph the initial position is approached in the negative x direction. The red curve is the error made in the positive direction (bottom graph, with hysteresis) and the blue graph the error made in the negative direction (top graph, with hysteresis). The dashed lines show the trends. 18 mm CD AB EF G 60 z y x C B A a) Leitz Aristoplan CD AB EF G 60 CD EF G 60 40 40 40 20 20 20 0 D C B A b) Zeiss Axioskop 0 D C 60 µm AB 27 mm 0 D B A c) Zeiss Axioplan Figure 7. Stage tilt (z) as a function of lateral position. z(x, y) surfaces found for the three microscope systems. For all three graphs the z-range is 60 µm. The best results were found for the Zeiss Axioskop, but, as can be seen in figure 7(c), the z(x, y) surface of the Zeiss Axioplan is almost perpendicular to the optical axis of the system. 3.3.3. Axial hysteresis. To assess the hysteresis in the z direction we measured a focus function [2] twice, once moving the stage in the positive z direction and once in the negative z direction. The results of this experiment are shown in figure 8. Each graph shows the two focus functions, F (z) against the z position, slightly shifted. This shift is caused by the hysteresis in the motor in the axial direction. For two of the microscopes the shift can be clearly seen; the shift is negligible for the Zeiss Axioplan. This stage apparently incorporates a mechanism that corrects for axial hysteresis. 3.3.4. Stability of the z-axis. If the focus function has been measured as a function of position, v = F (z), then the axial position relative to the in-focus position (z = 0) can be deduced from the z position as z = F −1 (v). By acquiring images over a period of time without intentionally moving the stage, the stability of the z-axis can be determined in the presence of mechanical vibrations, disturbances to the motor electronics, temperature changes, and gravity. 145 L R van den Doel et al 1.6 µm 2.4 µm 1 1 0.5 0.5 0.5 F(z) 1 -5 -2.5 2.5 a) Leitz Aristoplan 5 -5 -2.5 2.5 5 -5 b) Zeiss Axioskop -2.5 2.5 5 z-position c) Zeiss Axioplan F(z) Figure 8. Two focus functions, one moving upwards and one moving downwards, were measured for each microscope system. The distance between the in-focus positions is the axial hysteresis. The two focus functions almost completely overlap in (c). 0.5 0.4 0.3 0.2 0.1 2.5 5 7.5 10 z in µm 30 60 90 120 t in min. Figure 9. Results for a stability measurement on the Zeiss Axioskop. The left-hand side shows the focus function F (z). The right-hand side shows the focus value as a function of time. These focus values can be related to the distance from the in-focus position. The Zeiss Axioskop gave reproducible results for this experiment. Typical results are shown in figure 9. The Leitz Aristoplan and the Zeiss Axioplan did not. Over a period of 60 min the stage of the Zeiss Axioskop dropped about 5.7 µm or 96 nm min−1 . To understand the implications of this consider a microscope objective with a depth of focus of 1 µm [9]. If a series of images is to be acquired for dynamical studies, then the images will remain in focus for up to 10 min. 3.4. Optical transfer function The quality of images acquired through a properly adjusted microscope is inevitably limited by the lenses. The entire electro-optical system of a microscope can be characterized by means of its OTF. For an ideal circularly-symmetric, diffraction-limited objective the OTF is given by [10] p 2 (2/π ) arccos(f/f ) − (f/f ) 1 − (f/f ) c c c OTF(f ) = |f | ≤ fc 0 |f | > fc (13) 146 where f is the spatial frequency expressed in cycles per unit length, and fc is the cut-off frequency, representing the maximum spatial frequency that can be passed through the lens [7, 11, 12]. The cut-off frequency is given by fc = 2N A . λ (14) There are a variety of techniques for measuring the OTF. Some involve the use of ‘impulse-like’ objects, for example microspheres, while others use bar patterns to determine a contrast modulation transfer function (CMTF), which can then be transformed into the OTF [13–15]. Our procedure for measuring the OTF requires an image of a ‘knife-edge’ acquired with a known objective at a specific wavelength. A ‘knife-edge’ is simply a dark–white transition as shown in figure 10(a). It is essential that the image is sampled at a sampling frequency that meets the Nyquist criterion from formula (12). The first step in the procedure is to correct for shading in the image. This can be done either by the procedures described in section 3.1 or by a flatfield correction procedure. The latter procedure uses a dark image Idark [m, n], which represents the dark current. Furthermore, it uses a white image Iwhite [m, n], which is an Quantitative evaluation of light microscopes empty image with only the illumination. This white image includes the dark image as well. The flat-field correction is then based on the following equation: If lat-f ield [m, n] = A a) b) c) Figure 10. (a) The ‘knife-edge’ image. The red full curve is the intensity in grey values along a single line in this image. The region between the red dashed lines contains the dark–white transition. (b) A cubic spline interpolation algorithm with eight interpolation points is applied to the dark–white transition in the top image. The red curve shows the intensity along a row in the interpolated image. (c) The derivative of the mid image is computed and the resulting set of PSFs is aligned to produce the line response. I [m, n] − Idark [m, n] Iwhite [m, n] − Idark [m, n] (15) where A is a constant to scale the image If lat-f ield . After the flat-field correction a 32-pixel-wide region around the edge is interpolated by a factor of eight using a cubic spline interpolation algorithm [4] resulting in a 256-pixel-wide image. The interpolated image is shown in figure 10(b). The result is convolved with a 7-pixel-wide 1-D derivativeof-Gaussian kernel with σ = 1.5 to obtain a smoothed estimate of the knife edge. This result can be regarded as the line response of the electro-optical system. To obtain an improved estimate of the PSF the maxima are arranged line by line in the center column of the image, as shown in figure 10(c). These lines are then averaged columnwise to provide the 1-D PSF. The averaging over N √ lines improves the signal-to-noise ratio by a factor of N . The Fourier transform of the PSF is the OTF. We have measured the OTF for a collection of objectives for all three microscope systems and for four different test wavelengths. In figure 11 the OTFs are shown for three 40× objectives: one with N A = 0.75, and two with N A = 1.30. The sampling densities of the objectives with N A = 1.30, as shown in table 3, are below the Nyquist frequency from formula (12). However, the performance of these two particular objectives is so bad that the undersampling of the knife edge had no effect on the measurement of the OTF. Several aspects of these curves are striking. First, the measured OTF cannot exceed the theoretical OTF, but several OTFs appear to do so. This is an artifact of the scaling of the curves. Each curve is scaled so that its maximum value is 1 and thus some OTFs are increased in amplitude. In an ideal microscope lens system there is no energy loss (photons) between input and output. In mathematical terms this translates to the condition OTF(f = 0) = 1. Second, the 40×/0.75 objective achieves almost ideal performance at the test wavelengths λ = 500 nm, 600 nm, and 700 nm. At λ = 400 nm, however, no objectives perform near the diffraction-limited OTF: apparently, objectives are not corrected for wavelengths in the deep blue (400 nm) part of the spectrum. Finally, all of the OTFs have been plotted along the horizontal axis in normalized units of N A. This permits easy comparison of each OTF per wavelength against the ideal behavior, described by equation (13). We suspect that the bad performance of the 40×/1.30 objective is caused by prolonged use of this objective for multi-wavelength studies [16, 17]. This has led to a deterioration in the OTF performance of the lens. 147 1 OTF(f) OTF(f) L R van den Doel et al Leitz Aristoplan 40x/1.30 0.5 1 Zeiss Axioskop 40x/1.30 λ=400nm λ=500nm λ=600nm λ=700nm 0.5 theoretical OTF 1 2NA/λ NA/λ OTF(f) OTF(f) NA/λ Zeiss Axioplan 40x/0.75 1 2NA/λ Zeiss Axioskop 40x/0.75 0.5 0.5 NA/λ NA/λ 2NA/λ 2NA/λ Figure 11. OTFs for wavelengths λ = 400 nm, 500 nm, 600 nm, and 700 nm for three microscopes and three objectives. 4. Conclusions The purpose of this study was on the one hand to provide a systematic approach, a methodology, for the evaluation of microscopes as quantitative imaging devices, and on the other hand to compare three specific microscope systems. The digital image processing techniques presented in this note are straightforward to implement and can be applied to other scanning devices such as flatbed scanners. With respect to the comparison of microscopes, it is important to understand that the measurements presented here are for one microscope of each type, one lens of each specific type, and one specific set of experiments. The Leitz Aristoplan microscope has been in constant use in our laboratory since 1991, and the Zeiss Axioskop since 1993. These factors should be taken into account when weighing issues such as illumination, planar and axial stage motion, and spatial resolution in terms of the OTF. Acknowledgments We would like to express our thanks to Dr Heinz Gundlach of Carl-Zeiss in Jena, Germany for making the Zeiss Axioplan microscope available to us and to Dr Françoise Giroud of the Université Joseph Fourier, Grenoble for providing us with the HCM test slide. This work was partially supported by the Netherlands Organization for Scientific Research (NWO) grant 900-538-040, the Foundation for Technical Sciences (STW) project 2987, the Concerted Action for Automated Molecular Cytogenetics 148 Analysis (CA-AMCA), the Human Capital and Mobility Project FISH, the Rolling Grants program of the Foundation for Fundamental Research in Matter (FOM) and the Delft Inter-Faculty Research Center Intelligent Molecular Diagnostic Systems (DIOC-IMDS). References [1] Mullikin J C, van Vliet L J, Netten H, Boddeke F R, van der Feltz G and Young I T 1994 Methods for ccd camera characterization Proc. SPIE Image Acquisition and Scientific Imaging Systems (San Jose) vol 2173 (Bellingham, WA: SPIE) pp 73–84 [2] Boddeke F R, van Vliet L J, Netten H and Young I T 1994 Autofocusing in microscopy based on the otf and sampling Bioimaging 2 193–203 [3] Boddeke F R, van Vliet L J and Young I T 1997 Calibration of the automated z-axis of a microscope using focus functions J. Microsc. 186 270–4 [4] Press W H, Flannery B P, Teukolsky S A and Vetterling W T 1998 Numerical Recipes in C (Cambridge: Cambridge University Press) [5] Mood A M, Graybill F A and Boes D C 1974 Introduction to the Theory of Statistics (Singapore: McGraw-Hill) [6] Oppenheim A V, Willsky A S and Young I T 1993 Systems and Signals (Englewood Cliffs, NJ: Prentice-Hall) [7] Castleman K R 1996 Digital Image Processing 2nd edn (Englewood Cliffs, NJ: Prentice-Hall) [8] Young I T 1989 Characterizing the imaging transfer function Fluorescence Microscopy of Living Cells in Culture: Quantitative Fluorescence Microscopy—Imaging and Spectroscopy vol 30B, ed D L Taylor and Y L Wang (San Diego, CA: Academic) pp 1–45 Quantitative evaluation of light microscopes [9] Young I T, Zagers R, van Vliet L J et al 1993 Depth-of-focus in microscopy 8th Scandinavian Conf. on Image Analysis (Tromsø, Norway) (Tromsø: Norwegian Society for Image Processing and Pattern Recognition) pp 493–8 [10] van Vliet L J 1993 Grey-scale measurements in multi-dimensional digitized images PhD Thesis Delft University of Technology [11] Born M and Wolf E 1980 Principles of Optics 6th edn (Oxford: Pergamon) [12] Goodman J W 1996 Introduction to Fourier Optics (New York: McGraw-Hill) [13] Young I T 1983 The use of digital image processing techniques for the calibration of quantitative microscopes Proc. SPIE Applications of Digital Image Processing vol 397 (Bellingham, WA: SPIE) pp 326–35 [14] Young I T 1997 Calibration: sampling density and spatial resolution Current Protocols in Cytometry ed J P Robinson et al (New York: Wiley) pp 2.6.1–2.6.14 [15] van der Voort H T M, Brakenhoff G J and Janssen G C A M 1988 Determination of the 3-dimensional optical properties of a confocal scanning laser microscope Optik 78 48–53 [16] Netten H, Young I T, van Vliet L J, Vrolijk H, Sloos W C R and Tanke H J 1997 Fish and chips: automation of fluorescent dot counting in interphase cell nuclei Cytometry 28 1–10 [17] Netten H, van Vliet L J, Vrolijk H, Sloos W C R, Tanke H J and Young I T 1996 Fluorescent dot counting in interphase cell nuclei Bioimaging 4 93–106 149