Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
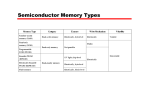
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
ELN5622 Embedded Systems Class 4 Spring, 2003 Aaron Itskovich [email protected] Serial IO Why use serial IO? – If transmission distance is large, parallel data transmission may prove to be to expensive to implement – If using the phone system, only have the serial option – Pins are expensive (Board’s real estate and chip packaging) Serial IO Interfaces – Logical: performs the parallel to serial and serial to parallel conversion – Physical: Transforms signal to that of the media etc. RS232 Paralell access Logical Serial bus Physical Media Serial IO Direction of transmission – Duplex – Half duplex – Simplex Timing – Asynchronous – Synchronous Serial IO EIA standards include RS232, RS423, RS422, and RS485 Differences in the standards include – Mode of transmission (single vs. differential) – Data transmission rates – Type of transmission line and its length Serial IO Parameter RS232C Mode Single ended No. of 1/1 drivers and receivers Max cable 50 length (ft) Max data 20k rate (bps) RS423A Singleended RS-422A RS-485 1 / 10 1 / 10 32 / 32 4000 4000 4000 Differential Differentia l 100K @ 10M @ 40’, 10M 40’, 1K 100K @ 4000’ @4000’ 68HC11 Serial IO The 68HC11 supports both asynchronous and synchronous serial communications – SCI (serial communications interface) system provides asynchronous transfers – SPI (serial peripheral interface) system provides synchronous transfers – Both the SCI and the SPI use pins on port D to perform their transfers • SCI uses pins 0 and 1 • SPI uses pins 2-5 Synchronous Serial Peripheral Interface - SPI For communicating with peripheral devices Supports Multi-master systems Can be the master or slave Up to 1MHz Can interface directly with standard peripherals, such as: – – – – Shift Registers LCD Display A/D D/A 8 bit data SPI Function Data is simultaneously transmitted (shifted out serially) and received (shifted in serially). A clock line is used to drive output data and sample input data. Slave Select line used to select a peripheral for transfer. Additional Features: – Error-detection logic • Write-collision detector • Multi-master mode-fault detector SPI Bus topology SPI Registers SPI Status Register (SPSR) – SPIF: SPI Finished • Cleared by reading SPSR followed by SPDR – WCOL: Write Collision Error – MODF: Mode-Fault SPI Data Register (SPDR) – Master writes to begin transfer. – Master and slave reads to read received byte after SPIF was set SPI Control Register (SPCR) – – – – – – – SPE: SPI Enable MSTR: Master vs. Slave SPIE: SPI Interrupt Enable DWOM: Port D Wired OR Mode CPOL: Clock Polarity CPHA: Clock Phase Select SPR1/0: Bit Rate Select bits SPI Registers DDRD DDRD5 (Master) DDRD4 (Master) DDRD3 (Master) DDRD2 (Slave) 0 = SS input to detect mode fault 1 = SS is general purpose output Slave = always input 0 = SCK output disabled 1 = SCK output enabled Slave = always input 0 = MOSI output disabled 1 = MOSI output enabled Slave = always input 0 = MISO output disabled 1 = MISO output enabled Master = always input SPI Master operation SPI Slave operation SPI Asynchronous Serial Communication Interface - SCI Full-Duplex UART-type Asynchronous system Uses standard NRZ format with: – – – – – One start bit (always 0, idle line always 1) 8 or 9 data bits One stop bit (1.5, 2 stop bits mode not supported) Data byte is transmitted LSB first Parity • Can be used to detect single-bit errors • Quantity of 1 bits in data byte – Does not include start and stop bits • Even vs. odd parity • Parity bit sent after MSB • Not directly supported by HC11 – Must be implemented in software – Peripheral chips (e.g. 8251 UART) do support it SCI On-chip programmable baud rate generator Tx & Rx both double-buffered. Tx & Rx use same Baud Rate 5v TTL (not +-12v RS-232) only logical block implemented. SCI Data Format SCI Ports,pins and registers Port pin PD1 is the transmit line TxD Port pin PD0 is the receive line RxD Data is written and read from SCI data register, SCDR Port is initialized by setting SCI Control Registers 1 and 2 Desired baud rate based on division factors in the Baud Rate Control Register Port status is reported in register SCSR SCI Registers and pins SCI Tx SCI Rx SCI configuration Select desired baud rate -- write to baud rate register (bits SCP0-1, SCR0-2) Select word length and wake up -- write to SCCR1 Select interrupt operations, TxD and RxD operations, etc. -- write to SCCR2 SCI Transmission procedure Poll status register or respond to interrupt (read the SCSR) If using 9-bit data, write 9th bit (bit 8) to T8 in SCCR1 If TDRE=1, write lower 8 bits of data to the SCDR SCI Receiving procedure Poll status register or react to interrupt (read the SCSR) If RDRF=1, read SCDR If 9-bit data, read bit 8 from SCCR1 SCI Receive errors Overrun Error – Occurs when new character is received before previous character is read from SCDR • New character is lost – Sets OR flag in SCSR Noise Error – Receiver samples data line at 16 times the bit rate – If samples in middle don’t match, there may be noise on the line – Sets NF flag in SCSR Framing Error – Occurs when an invalid stop bit is detected • May be due to baud rate mismatch, framing protocol mismatch, or noise – Sets FE flag in SCSR Abstract Data Types Abstract Data Types Beyond the basic data types – Unsigned Byte / Word – Signed Byte / Word – Char Used for modeling Separate parts of a larger programming task from the rest of the program Allows for better structuring Enables multiple programmers to work on the same project. Can be used to build libraries with code that can be incorporated into many different projects Abstract Data Types: Records A new data type made up of old data types. record t_POINT { X: signed double Y: signed double } record t_LINE { begin_pt_x : begin_pt_y : end_pt_x : end_pt_y : } signed double signed double signed double signed double Abstract Data Types: Records * record POINT_t POINT_X EQU POINT_Y EQU POINT_t EQU 0 2 4 * MyPoint Global Variable MyPoint: RMB POINT_t * MyPoint.X <- 5 LDX LDA STA * MyPoint.Y <- 5 LDA STA # MyPoint #5 X,POINT_X #5 X,POINT_Y Abstract Data Types Containers Sequential – FIFO – LIFO (Stack) Random access – Array Abstract Data Types: Stacks Stack – Last-in, first-out (LIFO) structure – Operations • Push – Places an item on the stack • Pull – Removes an item from the stack – Some architectures use the term “pop” – “Bottom” of the stack is at highest memory address, “top” of the stack is at the lowest address • Stack grows from high to low address Stack Management Important to pull data in reverse order that you pushed it Remember to initialize SP at beginning of program Note that SP points to empty memory location – Location where next value will be stored Stack Management Stack purpose General data storage (limited) Temporary data storage • 68HC11 has limited number of registers • Use stack to preserve register values Example: Multiply ACCA and ACCB, round to 8 bits PSHB ; save value in ACCB MUL ; ACCD = ACCA*ACCB ADCA #$00 ; round to 8 bits PULB ; restore ACCB Parameter and control information storage for subroutines Usually it’s a good idea to embed statistics State Machines Capture behavior at high level – Easy to describe and understand. – Well understood theory. – Good supply of simulation and verification tools. Statecharts Statecharts = FSM + Hierarchy + Orthogonality + Structured transitions + Broadcast communications Hierarchy Orthogonality Broadcast communications Bus Interfacing and Timing This section focuses on the ability to interface external devices to the microprocessor Interfacing requires – Hardware interface -- electrical and mechanical considerations of the interface – Software interface -- programming necessary to permit the external device and the processor exchange information The "bus" – The set of signal lines used to connect the processor and the peripheral devices using read/write operations – Can be a simple extension of the processor pins or can consist of modifications of the pins – Bus signals can be divided into 3 categories • Address • Data • Control Bus Interfacing and Timing Many microcontrollers use a multiplexed address and data bus – The data bus and (part of) the address bus use the same physical lines – Address and data signals cannot appear on the bus at the same time – Requires extra logic to demultiplex • Usually need to latch the address bits – Why do we use a multiplexed bus? General Bus Operation – Processor places desired peripheral's address onto address bus – Processor (or peripheral) places data onto data bus for a write (read) operation – Peripheral (processor) gates the data into its internal registers to complete the operation – Operation is directed by the various control lines that are included in the bus • Clock signals • Address strobe / latch • Device enable signals • Data direction signals -- read vs. write operations • Type of reference -- standard or memory mapped I/O -- IO/M* • Data ready General Bus Operation The bus is not a static connection mechanism – Peripheral devices must be enabled (given access to write to the bus) only when they are participating in a data transfer – Only 1 device can be driving the bus at any given time -- otherwise bus contention results • Other devices should be tristated – High-impedance state General Bus Operation Control signals Usually an active-low signal Referred to as E* – Sometimes S* or CS* Device must be enabled before you can write to it or read from it E* is usually derived from address lines Other signals – R/W* • May be separate signals – G* • Synchronizes data transfer • Sometimes CLK or E – Other address lines General Bus Operation Address decoding To communicate with a particular peripheral device, the processor places the device's address on the address bus All peripherals must examine the address and decide if they are being referenced -- address decoding – Usually use digital logic to generate the CS* signal Two methods of addressing and decoding – Full (exhaustive) decoding • Each peripheral is assigned to a unique address • All address bits must be used to define the referenced location • Typically used for memory devices General Bus Operation Address decoding • Partial decoding – Not all address bits are used in the decoding process – Peripheral can respond to more than 1 address – Main advantage is decreased circuit complexity in the decoder – Disadvantages: • Must guard against inadvertent accesses due to multiple addresses • Somewhat inefficient use of overall address space General Bus Operation 68HC11 Modes of operation – Internal parts of MCU • CPU, memory, registers – External parts • Pins for I/O and bus signals – To reduce pin count, some pins may have more than one function – For HC11, operating mode determines how pins are used • Select the operating mode using MODA and MODB pins at reset Single Chip Mode No external memory or I/O chips – Don’t need external bus – Ports B and C are used as I/O ports Reduced system cost Limited to on-chip RAM, ROM and EEPROM Expanded multiplexed mode Ports B and C used as address and data bus – Allows connections to external memory and I/O chips – Port B = A15 - A8 – Port C = AD7-AD0 • A7-A0 multiplexed with D7-D0 Control bus signals – Strobe A/address strobe pin (STRA/AS) used as AS – Strobe B/read/write pin (STRB/R/W*) used as R/W* Special bootstrap mode Test mode Generally used to load in a test program, EEPROM programming, or running a monitor program On reset, HC11 executes code located in the Boot ROM (BF00-BFFF for 68HC11E9) – Loads more program code using serial interface – Used by PCBUG11 – Listing of code in Reference Manual Special test mode – Intended for use by manufacturer only • Not much documentation available – Used to test the chip Chip Specifications Appendix A of Technical Data manual – – – – – Maximum ratings Recommended operating conditions DC electrical characteristics AC electrical characteristics Power dissipation Important when interfacing with other devices – Be aware of • Current limits • Voltage limits Timing diagrams Timing diagrams show the changes that occur in a signal or group of signals over time Memory Outline Memory Write Ability and Storage Permanence Common Memory Types Composing Memory Memory Hierarchy and Cache Advanced RAM Memory Stores large number of bits – – – – m x n: m words of n bits each k = Log2(m) address input signals or m = 2^k words e.g., 4,096 x 8 memory: • 32,768 bits • 12 address input signals • 8 input/output data signals Memory access – r/w: selects read or write – enable: read or write only when asserted – multiport: multiple accesses to different locations simultaneously Write ability Storage permanence Traditional ROM/RAM distinctions – ROM • read only, bits stored without power – RAM • read and write, lose stored bits without power Traditional distinctions blurred – Advanced ROMs can be written to • e.g., EEPROM – Advanced RAMs can hold bits without power • e.g., NVRAM Write ability – Manner and speed a memory can be written Storage permanence – ability of memory to hold stored bits after they are written permanence Storage Classification Mask-programmed ROM OTP ROM Life of product EPROM Tens of years Battery life (10 years) Ideal memory EEPROM FLASH NVRAM Nonvolatile In-system programmable SRAM/DRAM Near zero Write ability During fabrication only External programmer, one time only External External programmer, programmer 1,000s OR in-system, 1,000s of cycles of cycles External programmer OR in-system, block-oriented writes, 1,000s of cycles Write ability and storage permanence of memories, showing relative degrees along each axis (not to scale). In-system, fast writes, unlimited cycles Storage permanence Range of storage permanence – High end • essentially never loses bits • e.g., mask-programmed ROM – Middle range • holds bits days, months, or years after memory’s power source turned off • e.g., NVRAM – Lower range • holds bits as long as power supplied to memory • e.g., SRAM – Low end • begins to lose bits almost immediately after written • e.g., DRAM Nonvolatile memory – Holds bits after power is no longer supplied – High end and middle range of storage permanence ROM Nonvolatile memory Can be read from but not written to, by a processor in an embedded system Traditionally written to, “programmed”, before inserting to embedded system Uses – Store software program for general-purpose processor • program instructions can be one or more ROM words – Store constant data needed by system – Implement combinational circuit ROM Internals Horizontal lines = words Vertical lines = data Lines connected only at AA A circles Decoder sets word 2’s line to 1 if address input is 010 Data lines Q3 and Q1 are set to 1 because there is a “programmed” connection with word 2’s line Word 2 is not connected with data lines Q2 and Q0 Output is 1010 enable Internal view 8 × 4 ROM word 0 word 1 word 2 3×8 decoder word line 0 1 2 data line programmable connection wired-OR Q3 Q2 Q1 Q0 Mask programmable ROM Connections “programmed” at fabrication – set of masks Lowest write ability – only once Highest storage permanence – bits never change unless damaged Typically used for final design of high-volume systems – spread out NRE cost for a low unit cost OTP - ROM Connections “programmed” after manufacture by user – – – – user provides file of desired contents of ROM file input to machine called ROM programmer each programmable connection is a fuse ROM programmer blows fuses where connections should not exist Very low write ability – typically written only once and requires ROM programmer device Very high storage permanence – bits don’t change unless reconnected to programmer EPROM Programmable component is a MOS transistor – Transistor has “floating” gate surrounded by an insulator – (a) Negative charges form a channel between source and drain storing a logic 1 – (b) Large positive voltage at gate causes negative charges to move out of channel and get trapped in floating gate storing a logic 0 – (c) (Erase) Shining UV rays on surface of floating-gate causes negative charges to return to channel from floating gate restoring the logic 1 – (d) An EPROM package showing quartz window through which UV light can pass Better write ability – can be erased and reprogrammed thousands of times Reduced storage permanence – program lasts about 10 years but is susceptible to radiation and electric noise EEPROM Programmed and erased electronically – typically by using higher than normal voltage – can program and erase individual words Better write ability – can be in-system programmable with built-in circuit to provide higher than normal voltage • built-in memory controller commonly used to hide details from memory user – writes very slow due to erasing and programming • “busy” pin indicates to processor EEPROM still writing – can be erased and programmed tens of thousands of times Similar storage permanence to EPROM (about 10 years) Far more convenient than EPROMs, but more expensive FLASH Extension of EEPROM – Same floating gate principle – Same write ability and storage permanence Fast erase – Large blocks of memory erased at once, rather than one word at a time – Blocks typically several thousand bytes large Writes to single words may be slower – Entire block must be read, word updated, then entire block written back Used with embedded systems storing large data items in nonvolatile memory – e.g., digital cameras, TV set-top boxes, cell phones RAM Typically volatile memory – bits are not held without power supply Read and written to easily by embedded system during execution Internal structure more complex than ROM SRAM: Static RAM – Memory cell uses flip-flop to store bit – Requires 6 transistors – Holds data as long as power supplied DRAM: Dynamic RAM – Memory cell uses MOS transistor and capacitor to store bit – More compact than SRAM – “Refresh” required due to capacitor leak • word’s cells refreshed when read – Typical refresh rate 15.625 microsecond. – Slower to access than SRAM RAM variations PSRAM: Pseudo-static RAM – DRAM with built-in memory refresh controller – Popular low-cost high-density alternative to SRAM NVRAM: Nonvolatile RAM – Holds data after external power removed – Battery-backed RAM • SRAM with own permanently connected battery • writes as fast as reads • no limit on number of writes unlike nonvolatile ROM-based memory – SRAM with EEPROM or flash • stores complete RAM contents on EEPROM or flash before power turned off Example 11-13, 15-19 data<7…0> 2,23,21,24, 25, 3-10 22 addr<15...0> 11-13, 15-19 data<7…0> 27,26,2,23,21, addr<15...0> 24,25, 3-10 22 /OE 27 /WE 20 /CS1 26 CS2 HM6264 20 /OE /CS 27C256 block diagrams Device Access Time (ns) HM6264 85-100 27C256 90 Standby Pwr. (mW) .01 .5 Active Pwr. (mW) 15 100 Vcc Voltage (V) 5 5 •Low-cost low-capacity memory devices •Commonly used in 8-bit microcontroller-based embedded systems •First two numeric digits indicate device type device characteristics Read operation Write operation data data addr addr OE WE /CS1 /CS1 CS2 CS2 timing diagrams –RAM: 62 –ROM: 27 •Subsequent digits indicate capacity in kilobits Combining memory Memory size needed often differs from size of readily available memories When available memory is larger, simply ignore unneeded high-order address bits and higher data lines When available memory is smaller, compose several smaller memories into one larger memory – Connect side-by-side to increase width of words – Connect top to bottom to increase number of words • added high-order address line selects smaller memory containing desired word using a decoder – Combine techniques to increase number and width of words Memory Hierarchy Want inexpensive, fast memory Main memory – Large, inexpensive, slow memory stores entire program and data Processor Registers Cache Cache – Small, expensive, fast memory stores copy of likely accessed parts of larger memory – Can be multiple levels of cache Main memory Disk Tape Cache Usually designed with SRAM – faster but more expensive than DRAM Usually on same chip as processor – space limited, so much smaller than off-chip main memory – faster access ( 1 cycle vs. several cycles for main memory) Cache operation: – Request for main memory access (read or write) – First, check cache for copy • cache hit – copy is in cache, quick access • cache miss – copy not in cache, read address and possibly its neighbors into cache Several cache design choices – cache mapping, replacement policies, and write techniques Cache mapping Much less cache than main memory Are address’ contents in cache? Cache mapping used to assign main memory address to cache address and determine hit or miss Three basic techniques: – Direct mapping – Fully associative mapping – Set-associative mapping Caches partitioned into indivisible blocks or lines of adjacent memory addresses – usually 4 or 8 addresses per line Cache write When written, data cache must update main memory Write-through – – – – write to main memory whenever cache is written to easiest to implement processor must wait for slower main memory write potential for unnecessary writes Write-back – main memory only written when “dirty” block replaced – extra dirty bit for each block set when cache block written to – reduces number of slow main memory writes DRAM DRAMs commonly used as main memory in processor based embedded systems – high capacity, low cost Many variations of DRAMs proposed – – – – need to keep pace with processor speeds FPM DRAM: fast page mode DRAM EDO DRAM: extended data out DRAM SDRAM/ESDRAM: synchronous and enhanced synchronous DRAM – RDRAM: rambus DRAM Basic DRAM Address bus multiplexed between row and column components Row and column addresses are latched in, sequentially, by strobing ras and cas signals, respectively Refresh circuitry can be external or internal to DRAM device – strobes consecutive memory address periodically causing memory content to be refreshed – Refresh circuitry disabled during read or write operation FPM DRAM Each row of memory bit array is viewed as a page Page contains multiple words Individual words addressed by column address Timing diagram: – row (page) address sent – 3 words read consecutively by sending column address for each Extra cycle eliminated on each read/write of words from same page ras cas address data row col col col data data data EDO DRAM Improvement of FPM DRAM Extra latch before output buffer – allows strobing of cas before data read operation completed Reduces read/write latency by additional cycle ras cas address row data Speedup through overlap col col col data data data SDRAM SDRAM latches data on active edge of clock Eliminates time to detect ras/cas and rd/wr signals A counter is initialized to column address then incremented on active edge of clock to access consecutive memory locations ESDRAM improves SDRAM – added buffers enable overlapping of column addressing – faster clocking and lower read/write latency possible clock ras cas address data row col data data data Rambus DRAM (RDRAM) More of a bus interface architecture than DRAM architecture Data is latched on both rising and falling edge of clock Broken into 4 banks each with own row decoder – can have 4 pages open at a time Capable of very high throughput MMU Duties of MMU – Handles DRAM refresh, bus interface and arbitration – Takes care of memory sharing among multiple processors – Translates logic memory addresses from processor to physical memory addresses of DRAM Modern CPUs often come with MMU built-in Single-purpose processors can be used Assignment Write program sc_out, sc_in and “echo” in assembly – 15 points Sc_out – outputs content of A to the SCI Sc_in – returns received from SCI byte in A Define behavior of vending machine as statechart – 15 points For simplicity lets assume it accepts only 1 cent coin Use timeout to take into consideration mechanical delay on delivery Write program implementing software stack management (stack_init, push, pop) in assembly – 20 points