Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Low-voltage differential signaling wikipedia , lookup
Bus (computing) wikipedia , lookup
Low Pin Count wikipedia , lookup
Airborne Networking wikipedia , lookup
Internet protocol suite wikipedia , lookup
IEEE 802.11 wikipedia , lookup
Recursive InterNetwork Architecture (RINA) wikipedia , lookup
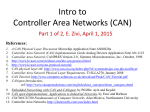
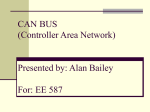
International Journal of Engineering Trends and Technology (IJETT) – Volume 12 Number 1 - Jun 2014 Effective CAN Controller Design for Highly Secured Applications * AVR Subramanyam1 , P. Bala Nagu2 PG Student (M. Tech) , 2 Associate Professor, Dept. of ECE, Chirala Engineering College, Chirala, A.P, India. 1 ABSRACT: Controller Area Network (CAN) was initially created by German automotive system supplier Robert Bosch in the mid-1980s for automotive applications as a method for enabling robust serial communication. In this pa-per, the main intention is to provide security mechanism which keeps the bus utilization as low as possible. The goal was to make automobiles more reliable, safe and fuel-efficient while decreasing wiring harness weight and complexity. The CAN protocol is a message-based protocol, not an address based protocol. This means that messages are not transmitted from one node to another node based on addresses. Embedded in the CAN message itself is the priority and the contents of the data being transmitted. All nodes in the system receive every message transmitted on the bus (and will acknowledge if the message was properly received). It is up to each node in the system to decide whether the message received should be immediately discarded or kept to be processed. A single message can be destined for one particular node to receive, or many nodes based on the way the network and system are designed. data to be transferred. 1. INTRODUCTION The Controller Area Network (CAN) is a serial communications protocol which efficiently supports distributed real-time control with a very high level of security. Its domain of application ranges from high speed networks to low cost multiplex wiring. In automotive electronics, engine control units, sensors, anti-skid-systems, etc. are connected using CAN protocol. At the same time it is cost effective to build into vehicle body electronics, e.g. lamp clusters electric windows etc. to replace the To achieve design transparency and implementation flexibility CAN has been subdivided into different layers. • the (CAN-) object layer • the (CAN-) transfer layer • the physical layer The object layer and the transfer layer comprise all services and functions of the data link layer defined by the ISO/OSI model. The • has different aspects regarding e.g. electrical features and the interpretation of ISSN: 2231-5381 finding which messages are to be transmitted • deciding which messages received by the transfer layer are actually to be achieve compatibility between any two CAN implementations. Compatibility, however, object layer includes wiring harness otherwise required. The intention of this specification is to scope of the used, • Providing an interface to the application layer related hardware. http://www.ijettjournal.org Page 39 International Journal of Engineering Trends and Technology (IJETT) – Volume 12 Number 1 - Jun 2014 There is much freedom in defining The CAN communication protocol is a object handling. The scope of the transfer CSMA/CD protocol. The CSMA stands for layer mainly is the transfer protocol, i.e. Carrier Sense Multiple Access. What this controlling performing means is that every node on the network arbitration, error checking, error signalling must monitor the bus for a period of no and fault confinement. Within the transfer activity before trying to send a message on layer it is decided whether the bus is free the bus (Carrier Sense). the framing, for starting a new transmission or whether Also, once this period of no activity a reception is just starting. Also some occurs, every node on the bus has an equal general features of the bit timing are opportunity to transmit a message (Multiple regarded as part of the transfer layer. It is Access). in the nature of the transfer layer that Detection. If two nodes on the network start there is no freedom for modifications. transmitting at the same time, the nodes The scope of the physical layer is the actual transfer of the bits between the Within one network CD stands for Collision will detect the ‘collision’ and take the appropriate action. different nodes with respect to all electrical properties. The In CAN protocol, a nondestructive the bitwise arbitration method is utilized. This physical layer, of course, has to be the means that messages remain intact after same for all nodes. There may be, however, arbitration is completed even if collisions much freedom in selecting a physical layer. are detected. All of this arbitration takes place without corruption or delay of the CAN properties higher priority message. • prioritization of messages • guarantee of latency times • configuration flexibility • multicast reception 2. CAN FRAME TYPES Message transfer is manifested and controlled by four different frame types: with time synchronization A DATA FRAME carries data from a • system wide data consistency transmitter to the receivers. • multi master • error detection and signaling A REMOTE FRAME is transmitted by a bus • automatic retransmission of corrupted unit to request the transmission of the messages as soon as the bus is idle DATA FRAME with the same IDENTIFIER. again • distinction between temporary errors An ERROR FRAME is transmitted by any and permanent failures of nodes and unit on detecting a bus error. autonomous switching off of defect nodes ISSN: 2231-5381 An OVERLOAD FRAME is used to provide http://www.ijettjournal.org Page 40 International Journal of Engineering Trends and Technology (IJETT) – Volume 12 Number 1 - Jun 2014 for an extra delay between the preceding ’dominant’. Within a REMOTE FRAME the and the succeeding DATA or REMOTE RTR BIT has to be ’recessive’. FRAMEs. CONTROL FIELD DATA FRAMEs and REMOTE FRAMEs are The CONTROL FIELD consists of six bits. It separated from preceding frames by an includes the DATA LENGTH CODE and two INTERFRAME SPACE. bits reserved for future expansion. The reserved bits have to be sent ’dominant’. DATA FRAME Receivers accept ’dominant’ and ’recessive’ A DATA FRAME is composed of seven bits in all combinations. different bit fields: REMOTE FRAME START OF FRAME, ARBITRATION FIELD, A station acting as a RECEIVER for certain CONTROL CRC data can initiate the transmission of the FIELD, ACK FIELD, END OF FRAME. The respective data by its source node by sening DATA FIELD can be of length zero. a REMOTE FRAME. START OF FRAME marks the beginning of A REMOTE FRAME is composed of six DATA FRAMES and REMOTE FRAMEs. It different bit fields: FIELD, DATA FIELD, consists of a single ’dominant’ bit. START OF FRAME, ARBITRATION FIELD, A station is only allowed to start transmission when the bus is idle (see BUS CONTROL FIELD, CRC FIELD, ACK FIELD, END OF FRAME. IDLE). All stations have to synchronize to Contrary to DATA FRAMEs, the RTR the leading edge caused by START OF bit of REMOTE FRAMEs is ’recessive’. There FRAME (see ’HARD SYNCHRONIZATION’) of is no DATA FIELD, independent of the the station starting transmission first. values of the DATA LENGTH CODE which may be signed any value within the IDENTIFIER admissible range 0...8. The value is the The IDENTIFIER’s length is 11 bits. These DATA LENGTH CODE of the corresponding bits are transmitted in the order from ID-10 DATA FRAME. to ID-0. The least significant bit is ID-0. The 7 most significant bits (ID-10 - ID-4) must ERROR FRAME not be all ’recessive’. The ERROR FRAME consists of two different fields. The first field is given by the Remote Transmission Request BIT superposition of ERROR FLAGs contributed In DATA FRAMEs the RTR BIT has to be from ISSN: 2231-5381 different http://www.ijettjournal.org stations. The following Page 41 International Journal of Engineering Trends and Technology (IJETT) – Volume 12 Number 1 - Jun 2014 second field is the ERROR DELIMITER. These waveforms shows how the OVERLOAD FRAME The OVERLOAD CAN controller is utilized the bus services FRAME contains the two bit fields OVERLOAD FLAG and by using the bus_off_on signal. At the same time it shows how the transmitter and receiver OVERLOAD DELIMITER. There are conditions, two which enables after successful transmission and reception kinds of both OVERLOAD lead to BIT TIME LOGIC MODULE the transmission of an OVERLOAD FLAG 3 SIMULATION RESULTS The Simulation results for the undergone modules are presented in this section Figure 3 Simulation Results Bit Time logic module The above waveform shows how the signals are blocked for providing the security by maintaining the proper delay BIT STREAM PROCESSOR Figure 1 Simulation Result-1 for CAN Module Figure 2 Simulation Result-2 for CAN Module Figure 4 Simulation Result Bit Stream Processor module ISSN: 2231-5381 http://www.ijettjournal.org Page 42 International Journal of Engineering Trends and Technology (IJETT) – Volume 12 Number 1 - Jun 2014 This waveform shows how the Device utilization summary: performance of controller in various modes. Figures 5 & 6 shows the RTL and Technology schematics of the simulated Selected Device : 3s500efg320-5 Number of Slices: of 4656 CAN modules. 18% Number of Slice Flip Flops: out of 9312 6% 1676 17% Number used as logic: Number used as RAMs: 1572 104 Number of IOs: Number of bonded IOBs: out of 624 Number of 4 input LUTs: out of 9312 232 19 19 8% Number of GCLKs: out of Figure 5 RTL Schematic of CAN controller 871 out 24 1 4% Conclusion The Complete Control Area Network Protocol is developed in the Verilog HDL which is wishbone compatible and supports Non-Destructive Broadcast bit-wise arbitration, Communication, Communication. The Broadcast CAN protocol functionality is verified using the Modelsim Tool and Synthesized using Xilinx Tool. References: 1. C. Szilagyi and P. Koopman, “A flexible approach to embedded network multicast authentication,” in Workshop on Embedded Systems Se-curity, 2008. 2. K. Koscher, A. Czeskis, F. Roesner, S. Patel, T. Kohno, S. Checkoway, D. McCoy, B. Kantor, D. Anderson, H. Shacham, Savage,“Experimental modern Figure 6 Technology Schematic of CAN controller security automobile,” in and analysis S. of IEEE Symposium Security and Privacy, pp. 447–462, 2010. 3. M. Wolf, A. Weimerskirch, and C. Paar, “Security in automotive bus systems,” in Workshop Embedded Security in Cars, 2004. ISSN: 2231-5381 a on http://www.ijettjournal.org Page 43 on International Journal of Engineering Trends and Technology (IJETT) – Volume 12 Number 1 - Jun 2014 4. A. Perrig, R. Canetti, D. Song, and D. Tygar, “Efficient authentication and signing of multicast streams over lossy channels,” in IEEE Symposium on Security and Privacy, pp. 56–73, 2000. 5. A. Perrig, R. Canetti, D. Song, and D. Tygar, “Efficient and secure source authentication for multicast,” in Network and Distributed System Security Symposium, pp. 35–46, 2001. 6. M. D. Natale, H. Zeng, P. Giusto, and A. Ghosal, “Worst-case time analysis of can messages,” in Understanding and Using the Controller Area Network Communication Protocol. Springer, pp. 43–65, 2012. Authors Profile: AVR Subramanyam is currently pursuing his post graduation Chirala in Engineering College. He has over two years of experience in industries and three year teaching experience. P. Bala working Nagu as is an Associate Professor in the Electronics Engineering & in department of Communication Chirala Engineering College, Chirala. He has Nine years of teaching experience along with one year industrial experience. ISSN: 2231-5381 http://www.ijettjournal.org Page 44