robotics - Suraj @ LUMS
... In fact, the term "robot" was first used in 1920 in a play called "R.U.R." Or "Rossum's universal robots" by the Czech writer Karel Capek. The plot was simple: man makes robot then robot kills man! Many movies that followed continued to show robots as harmful, menacing machines. ...
... In fact, the term "robot" was first used in 1920 in a play called "R.U.R." Or "Rossum's universal robots" by the Czech writer Karel Capek. The plot was simple: man makes robot then robot kills man! Many movies that followed continued to show robots as harmful, menacing machines. ...

A Survey on Artificial Intelligence and Robotics
... same period (’50), and initially there was no clear distinction between the two disciplines. The reason is that the notion of “intelligent machine”[3] naturally leads to robots and robotics. One might argue that not every machine is a robot, and certainly AI is concerned also with virtual agents[4] ...
... same period (’50), and initially there was no clear distinction between the two disciplines. The reason is that the notion of “intelligent machine”[3] naturally leads to robots and robotics. One might argue that not every machine is a robot, and certainly AI is concerned also with virtual agents[4] ...
The 2000 AAAI Mobile Robot Competition and Exhibition
... the American Association for Artificial Intelligence (AAAI), and the Naval Research Laboratory. The USAR arena was constructed by the National Institute of Standards and Technology. I would also like to express appreciation for personal contributions from Nils Nilsson and Ben Wegbreit. In addition, ...
... the American Association for Artificial Intelligence (AAAI), and the Naval Research Laboratory. The USAR arena was constructed by the National Institute of Standards and Technology. I would also like to express appreciation for personal contributions from Nils Nilsson and Ben Wegbreit. In addition, ...
Introduction to Robotics Class
... • Born in Adelaide, Australia in 1954 • Received Ph.D in computer science from Stanford University • Member of the M.I.T Artificial Intelligence Lab where he leads the mobile robot group. • Well funded to do research in autonomous vehicles. ($$$$) ...
... • Born in Adelaide, Australia in 1954 • Received Ph.D in computer science from Stanford University • Member of the M.I.T Artificial Intelligence Lab where he leads the mobile robot group. • Well funded to do research in autonomous vehicles. ($$$$) ...

Controlling a mobile robot with Visual Prolog 7
... Robot sends information about his movements, obtained by encoders on both driving wheels, so we can know the length of movement vector and its angle relatively to the robot’s starting position. Changing polar coordinates to Cartesian, computer tries to draw robot’s position on the map and assert the ...
... Robot sends information about his movements, obtained by encoders on both driving wheels, so we can know the length of movement vector and its angle relatively to the robot’s starting position. Changing polar coordinates to Cartesian, computer tries to draw robot’s position on the map and assert the ...

Explaining robot actions - Advanced Technology Laboratories
... proof-of-concept experiments have shown the merits of this, future work includes: 1. Supporting more specific answers. Thus far, the responses from the ERA system have focused primarily on the robot’s mode and world information. We have developed but not implemented algorithms that examine changes i ...
... proof-of-concept experiments have shown the merits of this, future work includes: 1. Supporting more specific answers. Thus far, the responses from the ERA system have focused primarily on the robot’s mode and world information. We have developed but not implemented algorithms that examine changes i ...
Types of Robots - Web Services Overview
... These kits, which were developed by the LEGO company with M.I.T. scientists, let kids create and program ...
... These kits, which were developed by the LEGO company with M.I.T. scientists, let kids create and program ...
Bio-inspired
... acting in the face of uncertain and unpredictable environments. It was reasoned that if a single robot required complex systems and techniques in order to perform in a reliable manner, then perhaps intelligent systems could be designed with many “simpler” robots using a minimalist approach to sensin ...
... acting in the face of uncertain and unpredictable environments. It was reasoned that if a single robot required complex systems and techniques in order to perform in a reliable manner, then perhaps intelligent systems could be designed with many “simpler” robots using a minimalist approach to sensin ...
Poster title - Tarleton State University
... The AmigoBot hardware comes with a collection of software tools, called ARIA™ (Advanced Robotics Interface for Applications) [1]. ARIA is written by the manufacturer in C++ under Microsoft® Visual Studio .NET ® 2003, so we used the same programming language and the same development environment. When ...
... The AmigoBot hardware comes with a collection of software tools, called ARIA™ (Advanced Robotics Interface for Applications) [1]. ARIA is written by the manufacturer in C++ under Microsoft® Visual Studio .NET ® 2003, so we used the same programming language and the same development environment. When ...
Danielle Rich Artificial Intelligence Final Paper Robotics Whether we
... operation and application of robots and computer systems for their control, sensory feedback, and information processing. We find them in our manufacturing plants, banks, and the cars we drive are becoming closer every day to where they won’t even need a human operating them. The idea of robots has ...
... operation and application of robots and computer systems for their control, sensory feedback, and information processing. We find them in our manufacturing plants, banks, and the cars we drive are becoming closer every day to where they won’t even need a human operating them. The idea of robots has ...

An Artist at RPI Who Draws on the Fu- ture
... organized the project, says the themes of Capek’s seminal play can be used to explore larger issues.” AI Conference Returns to College after 50 Years. Alex Belser. The Dartmouth. July 18, 2006 (thedartmouth.com ). “Fifty years after a group of about 10 young scientists first met to start the nascent ...
... organized the project, says the themes of Capek’s seminal play can be used to explore larger issues.” AI Conference Returns to College after 50 Years. Alex Belser. The Dartmouth. July 18, 2006 (thedartmouth.com ). “Fifty years after a group of about 10 young scientists first met to start the nascent ...
Artificial Intelligence & Robotics
... social ability - able to interact with other agents and possibly humans reactivity - able to perceive their environment and respond to changes that occur in it Agency – A particular system composed of intelligent agents, such as computers or robots, that cooperate in order to solve a problem. Behavi ...
... social ability - able to interact with other agents and possibly humans reactivity - able to perceive their environment and respond to changes that occur in it Agency – A particular system composed of intelligent agents, such as computers or robots, that cooperate in order to solve a problem. Behavi ...
Slide 1
... the links (the sections between the joints into their desired position. Without a drive, a robot would just sit there, which is not often helpful. Most drives are powered by air, water pressure, or electricity. ...
... the links (the sections between the joints into their desired position. Without a drive, a robot would just sit there, which is not often helpful. Most drives are powered by air, water pressure, or electricity. ...
robot
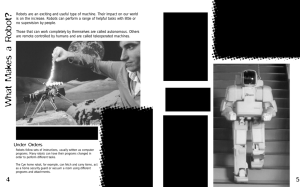
... To work on their own, robots need to know information about themselves and the world around them. Devices called sensors collect information, such as the robot’s position or the size of an obstacle ahead. Sensors pass this data back to a robot’s controller. This is the "brain" of the robot, which ma ...
... To work on their own, robots need to know information about themselves and the world around them. Devices called sensors collect information, such as the robot’s position or the size of an obstacle ahead. Sensors pass this data back to a robot’s controller. This is the "brain" of the robot, which ma ...
Computers - Robot Presentation
... For many years robots have excited people’s imaginations – whether in books, films or amusement parks. However it is only recently robots have left the realms of fiction. Even now thousands of robots are at work around the world… but are any of them actually intelligent? ...
... For many years robots have excited people’s imaginations – whether in books, films or amusement parks. However it is only recently robots have left the realms of fiction. Even now thousands of robots are at work around the world… but are any of them actually intelligent? ...
Weekly Report 1 Colin Luther
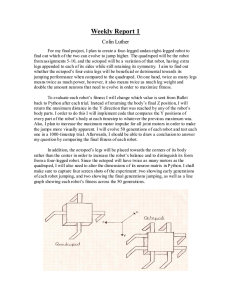
... For my final project, I plan to create a four- legged andan eight- legged robot to find out which of the two can evolve to jump higher. The quadruped will be the robot from assignments 5-10, and the octopod will be a variation of that robot, having extra legs appended to each of its sides while stil ...
... For my final project, I plan to create a four- legged andan eight- legged robot to find out which of the two can evolve to jump higher. The quadruped will be the robot from assignments 5-10, and the octopod will be a variation of that robot, having extra legs appended to each of its sides while stil ...
LEGO Mindstorms Hitachi H8-based RCX brick
... human controlled the stepping of this robot by pushing pedals with his feet. The complicated coordination of movements within a leg and between different legs during stepping was controlled by a computer ...
... human controlled the stepping of this robot by pushing pedals with his feet. The complicated coordination of movements within a leg and between different legs during stepping was controlled by a computer ...
Autonomous Intelligent Mobile Robotics Presentation
... Living Autonomously • An autonomous robot acts on its own decisions • Robots are not directly controlled by humans – Can take input and advice from humans ...
... Living Autonomously • An autonomous robot acts on its own decisions • Robots are not directly controlled by humans – Can take input and advice from humans ...
Intelligent Mobile Robotics
... Living Autonomously • An autonomous robot acts on its own decisions • Robots are not directly controlled by humans – Can take input and advice from humans ...
... Living Autonomously • An autonomous robot acts on its own decisions • Robots are not directly controlled by humans – Can take input and advice from humans ...