Chapter 5
... sections that include the previously covered curves; lines, circles, ellipses, parabolas, and hyperbolas. The general implicit nonparametric quadratic equation that describes the planar conic curve has five coefficients and naturally needs five conditions to complete it. The conic parametric equatio ...
... sections that include the previously covered curves; lines, circles, ellipses, parabolas, and hyperbolas. The general implicit nonparametric quadratic equation that describes the planar conic curve has five coefficients and naturally needs five conditions to complete it. The conic parametric equatio ...
File
... Theorem 1-6: In hyperbolic geometry, the fourth angle of a Lambert quadrilateral is acute, and each side adjacent to the acute angle is longer than the ...
... Theorem 1-6: In hyperbolic geometry, the fourth angle of a Lambert quadrilateral is acute, and each side adjacent to the acute angle is longer than the ...
Convex Sets and Convex Functions on Complete Manifolds
... The aim of this paper is to show how convex sets and functions give strong restrictions to the topology of a certain class of complete Riemannian manifolds without boundary. The idea of convexity plays an essential role for the proofs of "finiteness theorems", which give a priori estimates for the n ...
... The aim of this paper is to show how convex sets and functions give strong restrictions to the topology of a certain class of complete Riemannian manifolds without boundary. The idea of convexity plays an essential role for the proofs of "finiteness theorems", which give a priori estimates for the n ...
Slides
... The theory of real closed fields is decidable. Putting the two results together we can obtain a decidability result for metric spaces. ...
... The theory of real closed fields is decidable. Putting the two results together we can obtain a decidability result for metric spaces. ...

PDF
... on X has enough injectives. So we can define the sheaf cohomology H i (X, F) of a sheaf F to be the right derived functors of the global sections functor F → Γ(X, F). Usually we are interested in the case where X is a scheme, and F is a coherent sheaf. In this case, it does not matter if we take the ...
... on X has enough injectives. So we can define the sheaf cohomology H i (X, F) of a sheaf F to be the right derived functors of the global sections functor F → Γ(X, F). Usually we are interested in the case where X is a scheme, and F is a coherent sheaf. In this case, it does not matter if we take the ...

R The Topology of Chapter 5 5.1
... Definition 5.2.2. A set S ⊂ R is disconnected if there are two open intervals U and V such that U ∩ V = ∅, U ∩ S ̸= ∅, V ∩ S ̸= ∅ and S ⊂ U ∪ V . Otherwise, it is connected. The sets U ∩ S and V ∩ S are said to be a separation of S. In other words, S is disconnected if it can be written as the union ...
... Definition 5.2.2. A set S ⊂ R is disconnected if there are two open intervals U and V such that U ∩ V = ∅, U ∩ S ̸= ∅, V ∩ S ̸= ∅ and S ⊂ U ∪ V . Otherwise, it is connected. The sets U ∩ S and V ∩ S are said to be a separation of S. In other words, S is disconnected if it can be written as the union ...



PDF
... manifold to be a locally Euclidean n–dimensional second countable topological space X, together with a sheaf F , such that there exists an open cover {Ui } of X where: For every i, there exists a homeomorphism fi : Ui → Rn and an isomorphism of sheaves φi : DRn → F |Ui relative to fi . The idea here ...
... manifold to be a locally Euclidean n–dimensional second countable topological space X, together with a sheaf F , such that there exists an open cover {Ui } of X where: For every i, there exists a homeomorphism fi : Ui → Rn and an isomorphism of sheaves φi : DRn → F |Ui relative to fi . The idea here ...
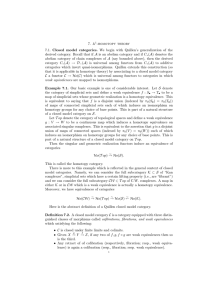
7. A1 -homotopy theory 7.1. Closed model categories. We begin with
... is equivalent to saying that f is a disjoint union (indexed by π0 (S• ) = π0 (T• )) of maps of connected simplicial sets each of which induces an isomorphism on homotopy groups for any choice of base points. This is part of a natural structure of a closed model category on S. Let T op denote the cat ...
... is equivalent to saying that f is a disjoint union (indexed by π0 (S• ) = π0 (T• )) of maps of connected simplicial sets each of which induces an isomorphism on homotopy groups for any choice of base points. This is part of a natural structure of a closed model category on S. Let T op denote the cat ...

Triangle reflection groups
... The main results of this paper are the introduction and partial proof of a theorem concerning the group of transformations generated by reflections in the sides of a triangle and a corollary concerning the finiteness of the group based on an algebraic property of one of its presentations. The main r ...
... The main results of this paper are the introduction and partial proof of a theorem concerning the group of transformations generated by reflections in the sides of a triangle and a corollary concerning the finiteness of the group based on an algebraic property of one of its presentations. The main r ...

4a.pdf
... A hyperbolic structure for the complement of the figure-eight knot was constructed in 3.1. This structure was in fact chosen to be complete. The reader may wish to verify this by constructing a horospherical realization of the torus which is the link of the ideal vertex. Similarly, the hyperbolic st ...
... A hyperbolic structure for the complement of the figure-eight knot was constructed in 3.1. This structure was in fact chosen to be complete. The reader may wish to verify this by constructing a horospherical realization of the torus which is the link of the ideal vertex. Similarly, the hyperbolic st ...
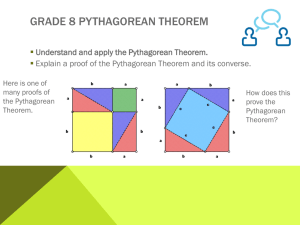
Regular Tesselations in the Euclidean Plane, on the
... ‘Discrete’ is a topological assumption: we put on H the induced topology, as a subset of the topological group of the invertible matrices. In mathematical terms, the discreteness means that H has a fundamental domain D with positive area, that is: (a) every point of the plane can be moved to D by ap ...
... ‘Discrete’ is a topological assumption: we put on H the induced topology, as a subset of the topological group of the invertible matrices. In mathematical terms, the discreteness means that H has a fundamental domain D with positive area, that is: (a) every point of the plane can be moved to D by ap ...
chapter 9
... • A topological surface is orientable if you can determine the outside and inside. • Any orientable, compact (finite size) surface is determined by its number of holes (called the genus). ...
... • A topological surface is orientable if you can determine the outside and inside. • Any orientable, compact (finite size) surface is determined by its number of holes (called the genus). ...
Course Outline - Palisades School District
... If you miss class to participate in a school-approved trip or activity, the assignment is still due. (Student Handbook). HOMEWORK POLICY: Homework will be assigned regularly and is due the following day. Late homework will receive no credit. Work must be shown for each problem, answers only is not ...
... If you miss class to participate in a school-approved trip or activity, the assignment is still due. (Student Handbook). HOMEWORK POLICY: Homework will be assigned regularly and is due the following day. Late homework will receive no credit. Work must be shown for each problem, answers only is not ...
Course Outline - Palisades School District
... If you miss class to participate in a school-approved trip or activity, the assignment is still due. (Student Handbook). HOMEWORK POLICY: Homework will be assigned regularly and is due the following day. Late homework will receive no credit. Work must be shown for each problem, answers only is not ...
... If you miss class to participate in a school-approved trip or activity, the assignment is still due. (Student Handbook). HOMEWORK POLICY: Homework will be assigned regularly and is due the following day. Late homework will receive no credit. Work must be shown for each problem, answers only is not ...
Boundaries of CAT(0) Groups and Spaces
... there exists K > 0 such that d(γ(t), γ 0 (t)) ≤ K for any t ∈ [0, +∞). In this case we write γ ∼ γ 0 and we define ∂X := {γ geodesic ray in X}/ ∼ . We call ∂X the boundary of X. In the following we will explore the different topologies that we can use on ∂X. As this definition of the boundary is a d ...
... there exists K > 0 such that d(γ(t), γ 0 (t)) ≤ K for any t ∈ [0, +∞). In this case we write γ ∼ γ 0 and we define ∂X := {γ geodesic ray in X}/ ∼ . We call ∂X the boundary of X. In the following we will explore the different topologies that we can use on ∂X. As this definition of the boundary is a d ...

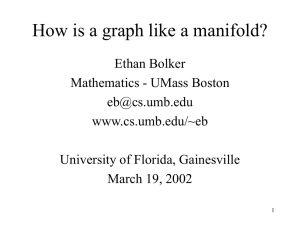
Wu-yen Chuang Curriculum Vitae
... • Postdoctoral Research Associate, Rutgers University, 2007–2010 • Ph.D. in Physics, Stanford University, 2001–2007 Thesis: Geometric Transitions, Topological Strings, and Generalized Complex Geometry Advisors: Michael E. Peskin, Shamit Kachru • B.S. in Physics, National Tsing-Hua University, Taiwan ...
... • Postdoctoral Research Associate, Rutgers University, 2007–2010 • Ph.D. in Physics, Stanford University, 2001–2007 Thesis: Geometric Transitions, Topological Strings, and Generalized Complex Geometry Advisors: Michael E. Peskin, Shamit Kachru • B.S. in Physics, National Tsing-Hua University, Taiwan ...

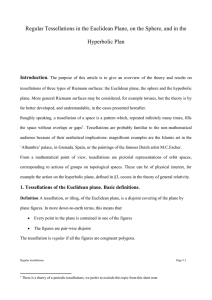
Homology Group - Computer Science, Stony Brook University
... Definition (Projective Plane) All straight lines through the origin in ℝ3 form a two dimensional manifold, which is called the projective plane RP 2 . A projective plane can be obtained by identifying two antipodal points on the unit sphere. A projective plane with a hole is called a crosscap. π1 (R ...
... Definition (Projective Plane) All straight lines through the origin in ℝ3 form a two dimensional manifold, which is called the projective plane RP 2 . A projective plane can be obtained by identifying two antipodal points on the unit sphere. A projective plane with a hole is called a crosscap. π1 (R ...
area - StFX
... • A topological surface is orientable if you can determine the outside and inside. • Any orientable, compact (finite size) surface is determined by its number of holes (called the genus). ...
... • A topological surface is orientable if you can determine the outside and inside. • Any orientable, compact (finite size) surface is determined by its number of holes (called the genus). ...
chapter 9
... • A topological surface is orientable if you can determine the outside and inside. • Any orientable, compact (finite size) surface is determined by its number of holes (called the genus). ...
... • A topological surface is orientable if you can determine the outside and inside. • Any orientable, compact (finite size) surface is determined by its number of holes (called the genus). ...
Topology

In mathematics, topology (from the Greek τόπος, place, and λόγος, study), is the study of topological spaces. It is an area of mathematics concerned with the properties of space that are preserved under continuous deformations, such as stretching and bending, but not tearing or gluing. Important topological properties include connectedness and compactness.Topology developed as a field of study out of geometry and set theory, through analysis of such concepts as space, dimension, and transformation. Such ideas go back to Gottfried Leibniz, who in the 17th century envisioned the geometria situs (Greek-Latin for ""geometry of place"") and analysis situs (Greek-Latin for ""picking apart of place""). Leonhard Euler's Seven Bridges of Königsberg Problem and Polyhedron Formula are arguably the field's first theorems. The term topology was introduced by Johann Benedict Listing in the 19th century, although it was not until the first decades of the 20th century that the idea of a topological space was developed. By the middle of the 20th century, topology had become a major branch of mathematics.Topology has many subfields:General topology establishes the foundational aspects of topology and investigates properties of topological spaces and investigates concepts inherent to topological spaces. It includes point-set topology, which is the foundational topology used in all other branches (including topics like compactness and connectedness).Algebraic topology tries to measure degrees of connectivity using algebraic constructs such as homology and homotopy groups.Differential topology is the field dealing with differentiable functions on differentiable manifolds. It is closely related to differential geometry and together they make up the geometric theory of differentiable manifolds.Geometric topology primarily studies manifolds and their embeddings (placements) in other manifolds. A particularly active area is low dimensional topology, which studies manifolds of four or fewer dimensions. This includes knot theory, the study of mathematical knots.See also: topology glossary for definitions of some of the terms used in topology, and topological space for a more technical treatment of the subject.