
Zachary Dodds Associate Professor of Computer Science Harvey
... the prize of a Sony AIBO canine robot. Technical Achievement Award for Overall Excellence in a Fully Autonomous System across all AAAI robotics competition categories, by the four students listed above, at AAAI 2005. Third place, 2005 ACM Student research competition, undergraduate division: Kamil W ...
... the prize of a Sony AIBO canine robot. Technical Achievement Award for Overall Excellence in a Fully Autonomous System across all AAAI robotics competition categories, by the four students listed above, at AAAI 2005. Third place, 2005 ACM Student research competition, undergraduate division: Kamil W ...

Autonomous agent based on reinforcement learning
... The assumption is that the robot is a tabula rasa and has no knowledge of the work space structure. Initially, it has just basic strategic knowledge of searching for solutions, based on random attempts, and a built-in learning system. The reinforcement learning method is used here to evaluate robot ...
... The assumption is that the robot is a tabula rasa and has no knowledge of the work space structure. Initially, it has just basic strategic knowledge of searching for solutions, based on random attempts, and a built-in learning system. The reinforcement learning method is used here to evaluate robot ...
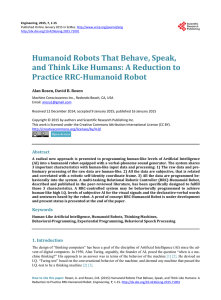
Humanoid Robots That Behave, Speak, and Think Like Humans: A
... circuit that is the central hub of intelligence for the whole robotic system. 2) Humans have a self-location and identification coordinate frame that is trained from infancy to give the human brain a proprioceptive self-knowledge capability. Even a baby, with a self-knowledge capability, instinctive ...
... circuit that is the central hub of intelligence for the whole robotic system. 2) Humans have a self-location and identification coordinate frame that is trained from infancy to give the human brain a proprioceptive self-knowledge capability. Even a baby, with a self-knowledge capability, instinctive ...
ppt
... What lessons for robots from these alternative views? At first sight, they are negative and unhelpful ! For everyday robot actions this implies we should do without planning, without the computational model, without internal representations ... .... but what should we do instead ? Non-Symbolic AI le ...
... What lessons for robots from these alternative views? At first sight, they are negative and unhelpful ! For everyday robot actions this implies we should do without planning, without the computational model, without internal representations ... .... but what should we do instead ? Non-Symbolic AI le ...
CS 561a: Introduction to Artificial Intelligence
... Several Greek schools developed various forms of logic: notation plus rules of derivation for thoughts. ...
... Several Greek schools developed various forms of logic: notation plus rules of derivation for thoughts. ...
Aalborg Universitet The Meaning of Action
... a dinner table may have to plan the order of handling plates, cutlery and glasses in a different way than previously demonstrated by the human teacher. Hence, it is usually not sufficient to just replicate the human movements. Instead, the robot must have the ability to recognize what parts of the w ...
... a dinner table may have to plan the order of handling plates, cutlery and glasses in a different way than previously demonstrated by the human teacher. Hence, it is usually not sufficient to just replicate the human movements. Instead, the robot must have the ability to recognize what parts of the w ...

From Natural Language to Soft Computing: New Paradigms
... in Artificial Intelligence”(EWNLC 2008) was organized as satellite-event of ICCCC 2008 by Dr. Dan Tufiş - director of Institute of Artificial Intelligence of Romanian Academy and Dr. Ioan Dziţac - Agora University of Oradea, and was addressed to the 30 participants, from Romania and other 6 countr ...
... in Artificial Intelligence”(EWNLC 2008) was organized as satellite-event of ICCCC 2008 by Dr. Dan Tufiş - director of Institute of Artificial Intelligence of Romanian Academy and Dr. Ioan Dziţac - Agora University of Oradea, and was addressed to the 30 participants, from Romania and other 6 countr ...

Multi-Robot Box-Pushing in Presence of Measurement Noise
... by twin robots, the range data obtained by the robots at any instant of time are measurements, and the torque and/or force to be developed by the robots for a local movement of the box are estimators. We here use torques and forces developed by the robots to construct two objectives on minimization ...
... by twin robots, the range data obtained by the robots at any instant of time are measurements, and the torque and/or force to be developed by the robots for a local movement of the box are estimators. We here use torques and forces developed by the robots to construct two objectives on minimization ...
Future Computing and Robotics: A Report from the HBP Foresight Lab
... information & communication technology (ICT) and robotics. As computing is increasingly integrated into all aspects of societies, economies and everyday life, and as robotic machines play an ever larger role in industrial production and elsewhere, carrying out many tasks that were previously only po ...
... information & communication technology (ICT) and robotics. As computing is increasingly integrated into all aspects of societies, economies and everyday life, and as robotic machines play an ever larger role in industrial production and elsewhere, carrying out many tasks that were previously only po ...

Natural Language Interaction with Robots Alden Walker May 7, 2007
... language processor on top of it which can handle the small subset of English which makes sense for commands and queries. By limiting the problem in such a way, we hope not only to end up with a functioning example of a robot able to follow commands given in natural language but also to develop metho ...
... language processor on top of it which can handle the small subset of English which makes sense for commands and queries. By limiting the problem in such a way, we hope not only to end up with a functioning example of a robot able to follow commands given in natural language but also to develop metho ...

Robotics and Artificial Intelligence: a Perspective on
... to be abandoned, and goals to be updated. These deliberation functions interact within a complex architecture (not depicted in Fig. 1) that will be discussed later. They are interfaced with the environment through the robot’s platform functions, i.e., devices offering sensing and actuating capabilit ...
... to be abandoned, and goals to be updated. These deliberation functions interact within a complex architecture (not depicted in Fig. 1) that will be discussed later. They are interfaced with the environment through the robot’s platform functions, i.e., devices offering sensing and actuating capabilit ...

Execution monitoring in robotics: A survey
... Received 20 September 2004; received in revised form 1 September 2005; accepted 13 September 2005 ...
... Received 20 September 2004; received in revised form 1 September 2005; accepted 13 September 2005 ...
The Intelligent Conversational Humanoid Robot
... study of the mind and the way it works. For the purposes of cognitive science, artificial intelligence is defined as “ a codification of knowledge will finally explain intelligence” [2]. However, when it comes to engineering, the purpose of artificial intelligence is to use knowledge to solve real-w ...
... study of the mind and the way it works. For the purposes of cognitive science, artificial intelligence is defined as “ a codification of knowledge will finally explain intelligence” [2]. However, when it comes to engineering, the purpose of artificial intelligence is to use knowledge to solve real-w ...

Multi-Agent Path Finding with Kinematic Constraints
... events v and v 0 indicating that event v must be scheduled between LB(e) and U B(e) time units before event v 0 . We add two additional vertices. XS represents the start event and therefore has edges annotated with the STN bounds [0, 0] to all vertices without incoming edges. Similarly, XF represent ...
... events v and v 0 indicating that event v must be scheduled between LB(e) and U B(e) time units before event v 0 . We add two additional vertices. XS represents the start event and therefore has edges annotated with the STN bounds [0, 0] to all vertices without incoming edges. Similarly, XF represent ...

PDF
... Robotic applications often include risky actions that, if applied under certain circumstances, may yield unrecoverable errors. When planning, these unrecoverable errors may lead to “dead-ends”, as they are states from where the planner cannot provide a solution anymore [1]. The robot decisionmaker s ...
... Robotic applications often include risky actions that, if applied under certain circumstances, may yield unrecoverable errors. When planning, these unrecoverable errors may lead to “dead-ends”, as they are states from where the planner cannot provide a solution anymore [1]. The robot decisionmaker s ...
Robot Control Paradigms Intelligent Mobile Robotics CS 490 Fall 2002
... – The robot must be able to handle unexpected events. – The usual state of affairs Derived from slides by Jerry Weinberg: http://www.cs.siue.edu/classes/Fall%202002/CS/CS490-CIS588/Weinberg/Lectures/ ...
... – The robot must be able to handle unexpected events. – The usual state of affairs Derived from slides by Jerry Weinberg: http://www.cs.siue.edu/classes/Fall%202002/CS/CS490-CIS588/Weinberg/Lectures/ ...

review and analysis of different methodologies used in mobile robot
... respond to human supplied commands such as “Follow the corridor and turn right at the second T junction” is achieved by an ensemble of neural networks whose activation and deactivation are controlled by a supervisory controller that is rule-based. Glasius, Komoda, and Stan (1994) have proposed a mod ...
... respond to human supplied commands such as “Follow the corridor and turn right at the second T junction” is achieved by an ensemble of neural networks whose activation and deactivation are controlled by a supervisory controller that is rule-based. Glasius, Komoda, and Stan (1994) have proposed a mod ...

A Relational Approach to Tool
... by active experimentation, selecting different types of objects as the tool and manipulating them in different ways. By analysing the teacher’s demonstration and then experimenting, the robot learns a new tool action that will allow the agent to perform variations of the task. We define a tool actio ...
... by active experimentation, selecting different types of objects as the tool and manipulating them in different ways. By analysing the teacher’s demonstration and then experimenting, the robot learns a new tool action that will allow the agent to perform variations of the task. We define a tool actio ...
What doctor? Why AI and robotics will define New Health
... medication intake. The application uses a visual recognition system to identify the patient’s face, the medication they’re taking, and confirm ingestion. The data is then sent back to the care provider or to a pharmaceutical company conducting a clinical trial. Robots have been used in medicine for ...
... medication intake. The application uses a visual recognition system to identify the patient’s face, the medication they’re taking, and confirm ingestion. The data is then sent back to the care provider or to a pharmaceutical company conducting a clinical trial. Robots have been used in medicine for ...
Fortnightly Thoughts
... into in the next few paragraphs. However, we are writing about AI now because we think that it is on the cusp of a period of more rapid growth in its use and applications. The reasons are multipronged, but the improvements in the capability and economics of hardware is a good place to start. On one ...
... into in the next few paragraphs. However, we are writing about AI now because we think that it is on the cusp of a period of more rapid growth in its use and applications. The reasons are multipronged, but the improvements in the capability and economics of hardware is a good place to start. On one ...

38. Behavior-Based Systems - Server users.dimi.uniud.it
... Hybrid control aims to combine the best aspects of reactive and deliberative control: the real-time response of reactivity and the rationality and optimality of deliberation. As a result, hybrid control systems contain two different components, the reactive/concurrent condition–action rules and the ...
... Hybrid control aims to combine the best aspects of reactive and deliberative control: the real-time response of reactivity and the rationality and optimality of deliberation. As a result, hybrid control systems contain two different components, the reactive/concurrent condition–action rules and the ...
eref Saglroglu Intelligent Systems Research Group, Contra
... fast real-time operation and easy implementation capabilities [1-5]. The aim in robotics is to create a device or a machine which can behave under human authority without representing any threat [6]. To reach this aim, it should be considered that the robots are highly nonlinear and complex systems ...
... fast real-time operation and easy implementation capabilities [1-5]. The aim in robotics is to create a device or a machine which can behave under human authority without representing any threat [6]. To reach this aim, it should be considered that the robots are highly nonlinear and complex systems ...

paper here
... Conference on Parallel Problem Solving from Nature, a.k.a. PPSN 2014, about what I call the Evolution of Things or strongly Embodied Evolution.1 It builds on the ideas presented in my TEDx talk (http://tinyurl.com/EibenTEDx) and the 2012 paper in the Evolutionary Intelligence journal [17]. To avoid ...
... Conference on Parallel Problem Solving from Nature, a.k.a. PPSN 2014, about what I call the Evolution of Things or strongly Embodied Evolution.1 It builds on the ideas presented in my TEDx talk (http://tinyurl.com/EibenTEDx) and the 2012 paper in the Evolutionary Intelligence journal [17]. To avoid ...

E-Proceedings - Machine Ethics and Machine Law
... The category of simple immoral machines includes socalled Munchausen machines (Bendel 2015), that is to say machines and systems that systematically produce lies. A concrete manifestation of this category is a chatbot that tells an untruth, like the LIEBOT. The LIEBOT project, which is discussed in ...
... The category of simple immoral machines includes socalled Munchausen machines (Bendel 2015), that is to say machines and systems that systematically produce lies. A concrete manifestation of this category is a chatbot that tells an untruth, like the LIEBOT. The LIEBOT project, which is discussed in ...
Robotics

Robotics is the branch of mechanical engineering, electrical engineering, electronic engineering and computer science that deals with the design, construction, operation, and application of robots, as well as computer systems for their control, sensory feedback, and information processing.These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, and/or cognition. Many of today's robots are inspired by nature contributing to the field of bio-inspired robotics.The concept of creating machines that can operate autonomously dates back to classical times, but research into the functionality and potential uses of robots did not grow substantially until the 20th century. Throughout history, it has been frequently assumed that robots will one day be able to mimic human behavior and manage tasks in a human-like fashion. Today, robotics is a rapidly growing field, as technological advances continue; researching, designing, and building new robots serve various practical purposes, whether domestically, commercially, or militarily. Many robots do jobs that are hazardous to people such as defusing bombs, mines and exploring shipwrecks.