Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
18.311 — MIT (Spring 2015)
Rodolfo R. Rosales (MIT, Math. Dept., E17-410, Cambridge, MA 02139).
April 6, 2015.
Answers to Problem Set # 05.
Contents
1 Linear 1st order PDE #17
1.1 Statement: Linear 1st order PDE #17 (ut + 21 t2 x ux = 0; data on x = 1) . . . . . . . . . . . .
1.2 Answer: Linear 1st order PDE #17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
2
2
2 Linear 1st order PDE #20
2.1 Statement: Linear 1st order PDE #20 (ut − 21 t2 x ux = 0; data on x = −1) . . . . . . . . . . .
2.2 Answer: Linear 1st order PDE #20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
2
3
3 Information loss and traffic flow shocks
3.1 Statement: Information loss and traffic flow shocks . . . . . . . . . . . . . . . . . . . . . . .
3.2 Answer: Information loss and traffic flow shocks . . . . . . . . . . . . . . . . . . . . . . . .
3
3
5
4 Haberman Book problem 71.07
4.1 Statement: Haberman problem 71.07 (observers) . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Answer: Haberman problem 71.07 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
6
6
5 Haberman Book problem 74.01
5.1 Statement: Haberman problem 74.01 (solve initial value problem) . . . . . . . . . . . . . . . .
5.2 Answer: Haberman problem 74.01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
7
7
6 Haberman Book problem 74.03
6.1 Statement: Haberman problem 74.03 (show not a traffic flow model & solve IVP) . . . . . . . .
6.2 Answer: Haberman problem 74.03 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
8
8
7 Haberman Book problem 77.06
7.1 Statement: Haberman problem 77.06 (Burger’s traveling waves) . . . . . . . . . . . . . . . . .
7.2 Answer: Haberman problem 77.06 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
9
10
8 DiAn28. Non-dimensional form
11
8.1 DiAn28 statement: Non-dimensional form (nonlinear damped spring) . . . . . . . . . . . . . . . 11
8.2 DiAn28 answer: Non-dimensional form . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
9 Initial value problem with Q quadratic # 01a
12
9.1 Statement: Initial value problem with Q quadratic # 01a . . . . . . . . . . . . . . . . . . . 12
9.2 Answer: Initial value problem with Q quadratic # 01a . . . . . . . . . . . . . . . . . . . . . 13
1
18.311 MIT, (Rosales)
Linear 1st order PDE #17.
2
List of Figures
1.1
2.1
3.1
5.1
6.1
7.1
1
Characteristics of a 1st order linear pde . . . . . . . . . . . . . . . . . . . .
Characteristics of a 1st order linear pde . . . . . . . . . . . . . . . . . . . .
Information loss and traffic flow shocks . . . . . . . . . . . . . . . . . . . .
Haberman’s problem 74.01: Initial value problem with c linear in ρ . . . .
Haberman’s problem 74.03: Characteristics for an initial value problem .
Haberman’s problem 77.06: Traveling wave solutions for Burger’s equation
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
4
6
8
9
11
Linear 1st order PDE #17
1.1
Statement: Linear 1st order PDE #17 (ut + 12 t2 x ux = 0; data on x = 1)
Consider the following signaling problem, for time −∞ < t < ∞,
ut + 12 t2 x ux = 0,
with u(1, t) =
1
.
1 + t6
(1.1)
1. Use the method of characteristics to solve the problem. Write an explicit formula for the solution.
2. Where is the solution defined by (1.1)?
Be careful here, as the formula you will obtain in item 1 gives values for a larger region.
3. Do a plot/sketch of a few selected characteristic curves.
1.2
Answer: Linear 1st order PDE #17
The characteristics for (1.1) are the curves satisfying the ode ẋ = 21 t2 x, with u̇ = 0 along each curve.
In particular, consider the ones that go through the line x = 1, where the data is given. Then, for some
1
−∞ < τ < ∞, x = 1 and u = f (τ ) = 1+τ
6
3
3
at t = τ . Solving
u = f (τ ) along x = e(t −τ )/6 .
(1.2)
It is easy to see that, along these characteristics
x is a strictly increasing function of t, as seen in figure 1.1. Further, we should use only t ≥ τ in (1.2)
(causality). Thus, solving for τ as a function
1/3 of t and x in (1.2) yields the formula
u = f t3 − 6 ln x
.
(1.3)
This solution is defined for x ≥ 1 only,
as this is the region that the characteristics in
1
(1.2) reach for t ≥ τ . For the given f , (1.3) yields
u=
.
(1.4)
3
1 + (t − 6 ln x)2
2
2.1
Linear 1st order PDE #20
Statement: Linear 1st order PDE #20 (ut − 12 t2 x ux = 0; data on x = −1)
Consider the following signaling problem, for time −∞ < t < ∞,
ut − 21 t2 x ux = 0,
with u(−1, t) =
1
.
1 + t6
(2.1)
18.311 MIT, (Rosales)
Information loss and traffic flow shocks.
3
Selected characteristics with −3 ! " ! 3.
3
2
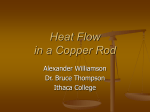
Figure 1.1: Linear 1st order pde #17. Plots of the
characteristics for a few selected values of −3 < τ < 3
(t = τ is where x = 1 along the characteristic). For
each characteristic: x → ∞ as t → ∞, and x → 0 as
t → −∞. Furthermore, x is strictly increasing on the
characteristics.
1
t
0
−1
−2
−3
0
1
2
3
x
4
5
6
1. Use the method of characteristics to solve the problem. Write an explicit formula for the solution.
2. Where is the solution defined by (2.1)?
Be careful here, as the formula you will obtain in item 1 gives values for a larger region.
3. Do a plot/sketch of a few selected characteristic curves.
2.2
Answer: Linear 1st order PDE #20
The characteristics for (2.1) are the curves satisfying the ode ẋ = − 12 t2 x, with u̇ = 0 along each curve.
In particular, consider the ones that go through the line x = −1, where the data is given. Then, for some
1
−∞ < τ < ∞, x = −1 and u = f (τ ) = 1+τ
6
3
3
at t = τ . Solving
u = f (τ ) along x = −e(τ −t )/6 .
(2.2)
It is easy to see that, along these characteristics
x is a strictly increasing function of t, as seen in figure 2.1. Further, we should use only t ≥ τ in (2.2)
(causality). Thus, solving for τ as a function
1/3 of t and x in (2.2) yields the formula
u = f t3 + 6 ln |x|
.
(2.3)
This solution is defined for −1 ≤ x < 0 only,
as this is the region that the characteristics in
1
(2.2) reach for t ≥ τ . For the given f , (2.3) yields
u=
.
(2.4)
3
1 + (t + 6 ln |x|)2
3
3.1
Information loss and traffic flow shocks
Statement: Information loss and traffic flow shocks
In this problem we will show that shocks in traffic flow are associated with information loss, and will derive
a formula that quantifies this loss. For simplicity, consider periodic solutions to the traffic flow equation
ρt + qx = 0,
periodic of period T > 0,
(3.1)
18.311 MIT, (Rosales)
Information loss and traffic flow shocks.
4
Selected characteristics with −3 ! " ! 3.
3
2
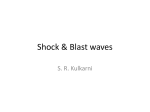
Figure 2.1: Linear 1st order pde #20. Plots of the
characteristics for a few selected values of −3 < τ < 3
(t = τ is where x = −1 along the characteristic). For
each characteristic: x → 0 as t → ∞, and x → −∞
as t → −∞. Furthermore, x is strictly increasing on
the characteristics.
1
t
0
−1
−2
−3
−6
−5
−4
−3
x
−2
−1
0
where the traffic flux is given by q = Q(ρ). Assume that there is a single shock per period, at x = σ(t).
The shock velocity, s, is given by the Rankine-Hugoniot jump condition
dσ
qR − qL
=s=
,
dt
ρR − ρL
(3.2)
where ρR (resp.: ρL ) is the value of ρ immediately to the right (resp.: the left) of the shock discontinuity,
qR = Q(ρR ), and qL = Q(ρL ). In addition, the shock satisfies the entropy condition
cL > s > cR ,
where c =
(3.3)
dQ
is the characteristic speed, cR = c(ρR ), and cL = c(ρL ). Now, let
dρ
Z
1 2
I = I(t) =
ρ (x, t) dx.
period 2
1. Show that:
dI
1
= (qL − qR ) (ρL + ρR ) +
dt
2
Z
(3.4)
ρR
ρ c(ρ) dρ.
(3.5)
ρL
Hint. For any short enough time period, a constant “a” exists such that a < σ(t) < a + T during the
Z σ
Z a+T
1 2
1 2
time interval. Given this, write I in the form I =
ρ dx +
ρ dx, before taking the time
2
a 2
σ
derivative. Then use the fact that, in each of the two intervals
Z ρρ satisfies
1
ρt = −c(ρ) ρx = − fx where f =
s c(s) ds.
(3.6)
ρ
0
In addition, use (3.2) to eliminate σ̇ from the resulting formulas.
dI
<0
(3.7)
dt
by interpreting the right hand side in (3.5) geometrically, as (the negative of) the area between two
d
curves — such area known to be positive. Hint. Use ρ c =
(ρ q) − q and (3.9).
dρ
2. Show that:
18.311 MIT, (Rosales)
Information loss and traffic flow shocks.
5
Remark 3.1 Recall that, in traffic flow, q = Q(ρ) is a concave function,1 vanishing at both ρ = 0 and the
jamming density ρj > 0, positive for 0 < ρ < ρj , with a maximum (the road capacity qm ) at some value
0 < ρm < ρj . Because of this, the conditions (3.2–3.3) are equivalent to:2
The shock velocity is given by the slope of the secant
line joining (ρL , qL ) to (ρR , qR ). Further ρL < ρR .
Note that
For ρL < ρ < ρR , the curve q = Q(ρ) is above the secant line,
because Q is concave.
(3.8)
(3.9)
Remark 3.2 How does I in (3.4) related to “information”? Basically, we argue that a function contains
the least amount of information when it is a constant, and that the more “oscillations” it has, the more
information it carries. A (rough) measure of this is given by
Z
1
J =
(ρ − ρ)2 dx,
(3.10)
period 2
where ρ is the average value of ρ (note that conservation guarantees that ρ is a constant in time). AlterP
natively, write ρ the Fourier series ρ = n ρn (t) ei n 2 π x/T for ρ. Then the amount of “oscillation” in ρ
P
can be characterized by n6=0 12 |ρn |2 , which is the same as (3.10). It is easy to see that
J = I − T ρ2 .
(3.11)
Hence J˙ = İ, so that (3.7) indicates that the shock is driving ρ towards a constant value.
The notion of “information” that we use here is not the same as that in “information theory” (which
requires a stochastic process of some kind). Neither is it the same as the related notion of “entropy” of
statistical mechanics (for this we would need a statistical theory 3 for traffic flow). Nevertheless, S = −J
plays the same role for (3.1) that entropy plays for gas dynamics.
Finally, we point out that it can be shown that: for any convex function h = h(ρ) (i.e.: h0 0 > 0)
Z
d
h(ρ) dx < 0 when shocks are present,
dt period
though showing this is a bit more complicated than for the special case h =
3.2
1
2
ρ2 .
Answer: Information loss and traffic flow shocks
Z a+T
1 2
1 2
To derive (3.5), we follow the hint and write I =
ρ dx +
ρ dx. This yields
2
2
a
σ
Z σ
Z a+T
1
2
2
İ =
σ̇ (ρL − ρR ) +
ρ ρt dx +
ρ ρt dx
2
a
σ
Z σ
Z a+T
1
=
(qL − qR )(ρL + ρR ) −
fx dx −
fx dx
2
a
σ
1
=
(qL − qR )(ρL + ρR ) − fL + fa − fa+T + fR
2
Z ρR
1
=
(qL − qR )(ρL + ρR ) +
ρ c(ρ) dρ,
2
ρL
Z
σ
d2 Q
< 0. Note also that only solutions satisfying 0 ≤ ρ ≤ ρj are acceptable.
dρ2
2
Thus shocks move slower than cars, and the density a driver sees increases as the car goes through a shock.
3
Such theories exist.
1
Concave means that
(3.12)
MIT, (Rosales)
Haberman Book problem 71.07.
6
where we have used
Z ρR(3.2), the fact that the solution is periodic (thus fa = fa+T ), and the definition of f
d
(thus fR − fL =
ρ c(ρ) dρ). Now we use the fact that ρ c =
(ρ q) − q to write
dρ
ρL
Z ρR
1
İ =
(qL − qR )(ρL + ρR ) + ρR qR − ρL qL −
Q(ρ) dρ,
2
ρL
Z ρR
1
(qL + qR )(ρR − ρL ) −
Q(ρ) dρ.
(3.13)
=
2
ρL
On the other hand, the secant line joining (ρL , qL ) to (ρR , qR ) is given by
Z ρR
ρR − ρ
1
ρ − ρL
+ qL
=⇒
y dρ = (qL + qR )(ρR − ρL )
y = qR
ρR − ρL
ρR − ρL
2
ρL
(3.14)
It follows that
İ = −A < 0,
(3.15)
where A is the area between the curve q = Q(ρ) and the secant line joining (ρL , qL ) to (ρR , qR ), in the
segment ρL < ρ < ρR . That A > 0 follows from (3.9). See figure 3.1.
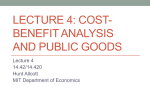
q = Q(!) (red), and secant line (blue).
A
Figure 3.1: The picture on the right illustrates
the area A, determined by the (concave) traffic
flow function q = Q(ρ) and the secant line joining
(ρL , qL = Q(ρL )) to (ρR , qR = Q(ρR )). The negative of this area is the rate at which I, defined in
(3.4), decreases.
q
!L
0
4
4.1
!R
!
Haberman Book problem 71.07
Statement: Haberman problem 71.07 (observers)
Consider two moving observers (possibly far apart), both moving at the same velocity V , such that the
number of cars the first observer passes is the same as the number passed by the second observer.
∆q
(a) Show that V =
.
∆ρ
(b) Show that the average density between the two observers stays a constant.
4.2
Answer: Haberman problem 71.07
Let x = a(t) be the position of the “first” observer and x = b(t) > a that of the “second”. We are told that
da
db
=
= V , and that
dt
dt
{(u − V ) ρ}x=a = {(u − V ) ρ}x=b .
(4.1)
MIT, (Rosales)
Haberman Book problem 74.01.
7
That is: the car flow from the point of view of both observers is the same.
(a) Clearly, (4.1) is the same as
V =
(u ρ)x=a − (u ρ)x=b
∆q
=
.
ρx=a − ρx=b
∆ρ
(b) Since neither the number of cars between the two observers, nor the distance between them, changes
with time: the average density between the two observers stays a constant.
5
5.1
Haberman Book problem 74.01
Statement: Haberman problem 74.01 (solve initial value problem)
Assume that u(ρ) = um (1 − ρ/ρj ), where um is the speed limit and ρj is the jamming density. For the
initial conditions:
for x < 0,
ρ0
ρ(x, 0) =
(5.1)
ρ0 (L − x)/L for 0 ≤ x ≤ L,
0
for L < x,
where 0 < ρ0 < ρj and 0 < L, determine and sketch ρ(x, t).
5.2
Answer: Haberman problem 74.01
2ρ
d(ρ u)
= um 1 −
Note that c = c(ρ) =
— a decreasing function of ρ. We now solve using characdρ
ρj
teristics, as follows:
Region (1) x < 0 at t = 0. Here ρ = ρ0 on x = c0 t + ζ, where ζ < 0
and c0 = c(ρ0 ), with c0 < um . Eliminating ζ, it follows that . . . . . . . . . . . . . . ρ = ρ0 for x < c0 t.
ρ0 (L−ζ)
on
x
=
c
t + ζ,
Region (2) 0 ≤ x ≤ L at t = 0. Here ρ = ρ0 (L−ζ)
L
L
where 0 ≤ ζ ≤ L.
um t + L − x
Eliminating ζ, it follows that . . . . . . . . . . . . . . . . . . . ρ =
ρ0 for c0 t ≤ x ≤ um t + L.
(um − c0 ) t + L
Region (3) L < x at t = 0. Here ρ = 0 along x = um t + ζ,
where L < ζ. Eliminating ζ, it follows that . . . . . . . . . . . . . . . . . . . . . . . . . . . . ρ = 0 for um t + L < x.
Summarizing, we have (see figure 5.1)
ρ
0u t + L − x
m
ρ0
ρ(x, t) =
(u
− c0 ) t + L
m
0
for x < c0 t.
for c0 t ≤ x ≤ um t + L.
for um t + L < x.
(5.2)
MIT, (Rosales)
Haberman Book problem 74.03.
8
!(x, t)
!0
Solution,
case c < 0.
0
x
c0t
0
u t+L
m
Figure 5.1: Haberman’s problem 74.01. Solution to the initial value problem posed in equation (5.1), for
the case c(ρ0 ) < 0, plotted for some arbitrary t > 0. The case c(ρ0 ) > 0 is similar.
6
6.1
Haberman Book problem 74.03
Statement: Haberman problem 74.03 (show not a traffic flow model & solve IVP)
Consider the (non-dimensionalized) partial differential equation
ρt − ρ2 ρx = 0 ,
−∞ < x < ∞ and t > 0.
(6.1)
(a) Why can’t this equation model a traffic flow problem?
(b) Solve this P.D.E. by the method of characteristics,
1
ρ(x, 0) =
1−x
0
6.2
subject to the initial conditions:
for x < 0,
for 0 ≤ x ≤ 1,
for 1 < x.
(6.2)
Answer: Haberman problem 74.03
(a) If equation (6.1) was a model for traffic flow, with ρ the car density, then the flow would have to be:
q = C − ρ3 /3, where C is some constant. However, q(0) = 0, so that C = 0. But then q = −ρ3 /3,
which is always negative (thus not acceptable as a model for traffic flow).
dx
dρ
(b) The characteristic equations are
= −ρ2 and
= 0.
(6.3)
dt
dt
For the given initial conditions this yields (see figure 6.1):
Region (1) 1 < x at t = 0. Here ρ = 0 along x = ζ, for ζ > 1. Thus ρ = 0 for x > 1.
Region (2) 0 ≤ x ≤ 1 at t = 0. Here ρ = 1 − ζ along x = −(1 − ζ)2 t + ζ, for 0 ≤ ζ ≤ 1. Eliminating ζ from these last two equations, we get ρ2 t + ρ + x − 1 = 0, for −t ≤ x ≤ 1.
r
1
1
1−x
Therefore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ρ = − +
+
for − t ≤ x ≤ 1.
2t
4 t2
t
MIT, (Rosales)
Haberman Book problem 77.06.
9
t
(2)
(1)
(3)
!
0
1
x=-t
x = - (1 - !2) t + !
x=-t+ !
"=1- !
"=1
!
x
"= 0
Characteristics.
Figure 6.1: Haberman’s problem 74.03. Characteristics for the initial value problem given by equations
(6.1–6.2). Note that the characteristics neither cross, nor do they leave any gaps — so that we do not have
to worry about introducing shocks or expansion fans into the solution.
Note that the positive square root gives the right behavior as t → 0, with no singularity. The other
root is spurious (introduced when eliminating ζ above).
Region (3) x < 0 at t = 0. Here ρ = 1 along x = −t + ζ, for ζ < 0.
Therefore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ρ = 1 for x < −t.
To summarize, the solution is:
1
r
1
1−x
1
ρ(x, 0) =
+
− +
2
4t
t
2t
0
7
7.1
for x < −t,
for − t ≤ x ≤ 1,
(6.4)
for 1 < x.
Haberman Book problem 77.06
Statement: Haberman problem 77.06 (Burger’s traveling waves)
Consider Burger’s equation, as derived in exercise 77.5:
2ρ
ρt + umax 1 −
ρx = ν ρxx .
ρmax
(7.1)
Suppose that a solution exists as a density wave, moving without change of shape at velocity V
ρ = f (x − V t).
(7.2)
MIT, (Rosales)
Haberman Book problem 77.06.
10
(a) What O.D.E. is satisfied by f ?
(b) Integrate this differential equation once. By graphical techniques show that a solution exists, such
that ρ → ρ2 as x → ∞ and ρ → ρ1 as x → −∞, only if ρ2 > ρ1 . Roughly sketch this solution, and
give a physical interpretation of this result.
(c) Show that the velocity of wave propagation, V , is the same as the shock velocity separating ρ = ρ1
from ρ = ρ2 (occurring if ν = 0).
7.2
Answer: Haberman problem 77.06
(a) Substituting (7.2) into (7.1), we find:
−V f 0 + umax
2f
1−
f 0 = ν f 00 .
ρmax
(7.3)
Here we have used that ρt = −V f 0 (z), ρx = f 0 (z), and ρxx = f 00 (z), where
primes denote derivatives with respect to z.
z =x−V t
and
(b) Equation (7.3) can be integrated once, to
f2
ν f = κ − V f + umax f −
,
ρmax
0
where κ is the integration constant, and we have used that 2 f f 0 =
(7.4)
d 2
(f ).
dz
Let now p = p(f ) be the quadratic polynomial given by
1
umax 2
p=
κ + (umax − V ) f −
f .
ν
ρmax
(7.5)
Then the equation for f = f (z) can be written in the form:
df
= p(f ).
dz
(7.6)
Thus we have the following two cases:
1. κ < ρmax (umax − V )2 /(4 umax ). Then p(f ) ≥ δc > 0, for some constant δc , and one cannot have
f → ρ2 as z → ∞ — with ρ2 finite.
2.
κ > ρmax (umax − V )2 /(4 umax ).
Then p has two real zeros, say ρ1 and ρ2 — which we label
so that ρ2 > ρ1 — see the left frame in figure 7.1. Thus, for ρ1 < f < ρ2 , equation (7.6) shows that
df
> 0, so that the solution will be monotone increasing, with f → ρ1 as z → −∞, and f → ρ2 as
dz
z → ∞. These solutions have a “sigmoid” shape (see the right frame in figure 7.1). Outside this range
the solutions cannot have finite limits at both z → ±∞ (see the right frame in figure 7.1) because
they are monotone decreasing, with p → −∞ as |y| grows.
The traveling wave solutions found here are actually the shocks found in the case ν = 0. When ν > 0,
because of the fact that the car drivers actually look ”ahead” in the road, the model does not develop
discontinuities, but merely very sharp transitions in the car density ρ, whose thickness is controlled
18.311 MIT, (Rosales)
Dimensional analysis.
DiAn28.
11
Solutions to f" = p(f).
p
p = p(f)
f"
f
!
1
!
2
!2
!1
f
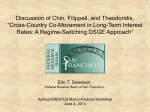
Figure 7.1: Haberman’s problem 77.06. Left: p = p(f ) in (7.5), for κ > ρmax (umax − V )2 /(4 umax ). Right:
typical solutions for equation (7.6), corresponding to the left frame.
by how sensitive the drivers are to ”what is coming” in the density ρ (this is, in fact, the meaning of
the parameter ν). Notice that, in terms of Burger’s equation (7.1), the ”look–ahead” feature shows
up as a ”diffusion” term in the model.
(c) It is easy to check that the polynomial p, defined in (7.5), satisfies
1
ρ
p(ρ) = (q(ρ) − V ρ + κ), where q = umax 1 −
ρ
ν
ρmax
is the car flow rate for the case ν = 0. Since p(ρ1 ) = p(ρ2 ), this implies
q(ρ1 ) − V ρ1 = q(ρ2 ) − V ρ1 .
But then
V =
q(ρ1 ) − q(ρ2 )
.
ρ1 − ρ2
Thus the velocity of wave propagation, V , is the same as the shock velocity separating ρ = ρ1 from
ρ = ρ2 (occurring if ν = 0).
8
8.1
DiAn28. Non-dimensional form
DiAn28 statement: Non-dimensional form (nonlinear damped spring)
d2 x̃
dx̃
k x̃
=
Consider a nonlinear damped mass-spring system
m 2 +ν
,
(8.1)
1 + α x̃2
dt̃
dt̃
where x̃ = x̃ t̃ is the position of the center of mass, m > 0 is the mass, ν > 0 is the (constant) damping
coefficient, k > 0 is the spring constant for small deviations, α > 0 is a coefficient that characterizes the
spring nonlinearity, and tildes (i.e.: x̃ and t̃) denote dimensional variables. The spring coefficient is
Since the spring to gets weaker as it stretches, the nonlinearity is called “soft”.
k
.
1 + α x̃2
18.311 MIT, (Rosales)
Initial value problem with Q quadratic # 01a.
12
1. What are the dimensions of ν, k, and α?
2. Introduce a-dimensional variables 4 x and
t, so that the equation takes the form
γ
d2 x
dx
= f (x),
(8.2)
dt
where γ is a constant without dimensions, and f is a function that involves no free constants.5
8.2
dt2
+
DiAn28 answer: Non-dimensional form
1. The units are:
[ν] =
mass
,
time
[k] =
mass
,
(time)2
and
[α] =
1
.
length2
1
√
2. There is a single length, √ , provided. Thus it should be . . . . . . . . . . . . . . . . . . . . . . . . . . . . x = x̃ α.
α
t̃
A unit of time can be constructed using ν and k. Thus take . . . . . . . . . . . . . . . . . . . . . . . . . t = k.
ν
mk
x
Then the equation takes the form in (8.2), with γ = 2 and f (x) =
.
ν
1 + x2
r
m
to the force-damping balance
The parameter γ is the square of the ratio of the oscillation time scale
k
ν
time scale . Hence it measures the relative importance of inertia versus damping.
k
Note. Alternative units of time can be constructed using either m and k (oscillation time scale), or m and ν (damping
time scale). However these do not yield the form in (8.2). Instead, they produce ẍ + γ1 ẋ = f (x) or ẍ + ẋ = γ2 f (x),
respectively, for some a-dimensional constants γ1 and γ2 .
9
Initial value problem with Q quadratic # 01a
9.1
Statement: Initial value problem with Q quadratic # 01a
Consider the traffic flow equation
ρt + qx = 0,
(9.1)
for a flow q = Q(ρ) that is a quadratic function of ρ. In this case c = dQ/dρ is a conserved quantity, and
the problem (including shocks, if any) can be entirely formulated in terms of c, which satisfies
1 2
ct +
c
= 0.
(9.2)
2
x
1. Consider the initial value problem determined by (9.2) and 6
c(x, 0) = 0 for x ≤ 0
and c(x, 0) = 2
√
x for x ≥ 0.
(9.3)
Without actually solving the problem, argue that the solution to this problem must have the form
c = t f (x/t2 ) for t > 0,
4
for some function f .
That is: x = x̃/L and t = t̃/T , for appropriate choices of a length L and a time T .
That is, no letter constants in it.
6
In a traffic problem, c must satisfy c(ρj ) ≤ c ≤ c(0). Ignore the fact that this does not apply for (9.2).
5
(9.4)
18.311 MIT, (Rosales)
Initial value problem with Q quadratic # 01a.
13
Hint. Let c = c(x, t) be the solution to the problem. For any constant a > 0, define C = C(x, t) by C =
1
c(a2 x, a t). What problem does C satisfy? Use now the fact that the solution to (9.2–9.3) is unique to
a
show that (9.4) must apply, by selecting a appropriately at any fixed time t > 0.
2. Use the method of characteristics to solve the problem in (9.2–9.3). Write the solution explicitly for
all t > 0, and verify that it satisfies (9.4). Warning: the solution involves a square root. Be careful to
select the correct sign, and to justify your choice.
3. For the solution obtained in item 2, evaluate cx at x = 0 for t > 0. Note that this derivative is
discontinuous there, so it has two values.
9.2
Answer: Initial value problem with Q quadratic # 01a
Note that
Ct = ct
and
(C 2 )x = (c2 )x
(9.5)
with c and its derivatives evaluated at (a2 x, a t). Furthermore C(x, 0) = c(x, 0). It follows that C = c,
hence
1
(9.6)
c(x, t) = c(a2 x, a t) for any a > 0.
a
Now, evaluate (9.6) at t = 1/a. Since a > 0 is arbitrary, it follows that
c(x, t) = t c(x/t2 , 1)
for any t > 0.
(9.7)
This is (9.4) with f (ξ) = c(ξ, 1).
Now we solve (9.2–9.3) using characteristics. For ζ ≤ 0 we obtain c = 0 along x = ζ, hence
c = 0 for x ≤ 0.
p
p
On the other hand, for ζ ≥ 0 the characteristics give c = 2 ζ along x = 2 ζ t + ζ. Thus
r
p
x
2
x + t − t = 2t
1+ 2 −1
for x ≥ 0.
c=2
t
(9.8)
(9.9)
As ζ varies from ζ = 0 to ζ = ∞, the characteristics in (9.9) cover the entire region x ≥ 0 — in a one-to-one fashion,
p
p
since ∂ζ x = p
1 + t/ ζ > 0. Furthermore, we can write these characteristics
in the form (t + ζ)2 = x + t2 , so that
p
p
p
ζ = −t + x + t2 — since ζ ≥ 0, the positive square root x + t2 must be selected.
The solution to (9.2–9.3) is given by (9.8–9.9), which clearly satisfies (9.4).
Finally, from (9.8–9.9), at (0, t) and t > 0, we have
cx = 0 from the left,
and cx =
THE END.
1
from the right.
t
(9.10)