Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Public address system wikipedia , lookup
Electronic engineering wikipedia , lookup
Mains electricity wikipedia , lookup
Alternating current wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Buck converter wikipedia , lookup
Power electronics wikipedia , lookup
Switched-mode power supply wikipedia , lookup
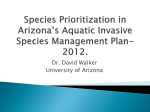
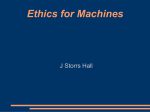
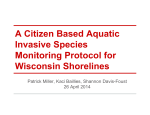
i m pl a nta b l e e l e c tr o n i c s A Cochlear-Implant Processor for Encoding Music and Lowering Stimulation Power This 75 dB, 357 W analog cochlear-implant processor encodes finephase-timing spectral information in its asynchronous stimulation outputs to convey music to deaf patients. C ochlear implants (CIs), or bionic ears, restore hearing in profoundly deaf (greater than –90 dB hearing loss) patients. They function by transforming frequency patterns in sound into corresponding spatial electrode-stimulation patterns for the auditory nerve. Over the past 20 years, improvements in sound-processing strategies, in the number of electrodes and channels, and in the rate of stimulation have yielded improved Ji-Jon Sit sentence and word recogniAdvanced Bionics tion scores in patients.1 Nextgeneration implants will be Rahul Sarpeshkar fully implanted inside the Massachusetts Institute patient’s body. Consequently, of Technology power consumption requirements for signal processing will be very stringent. The processor we discuss in this article is intended for use in such next-generation implants. It can operate on a 100 mA-hr battery with a 1,000 charge-and-discharge cycle lifetime for 30 years, while allowing nearly 1 mW of electrode-stimulation power. It provides more than an order-of-magnitude power reduction over an A/D-then-DSP (analog/digital, then digital signal processor) solution, which often consumes 5 mW or more. Our processor’s digital outputs, its immunity to power-supply noise and temperature variations, and its high 40 P ER VA SI V E computing programmability level ensure ease of use with an implant system’s other parts, such as the wireless communication link and the programming interface. CI users and music perception A common speech-processing strategy, used in implants and speech-recognition systems, employs a mel-cepstrum filter bank with eight to 20 channels. The mel scale maps frequencies to a perceptually linear scale.2 Filter banks based on the mel scale use linearly spaced filter center frequencies of up to 1 KHz and logarithmically spaced center frequencies above 1 KHz. (The center frequency is the frequency of maximum response in a bandpass filter output.) Ubiquitous cepstral techniques use a logarithmic measure of the spectral energy in each filter bank channel for further processing. Implants also use eight to 20 functioning electrodes for stimulation; because of spatial interactions among the electrodes, having more electrodes is often not useful. Compared to normal-hearing listeners, deaf patients who use a cochlear implant have only a very limited ability to perceive music. 3 In an earlier work, we showed that a low-power algorithm providing asynchronous interleaved sampling (AIS) in cochlear implants is wellsuited for encoding fine-phase-timing information.4 The ability to encode such information is Published by the IEEE CS n 1536-1268/08/$25.00 © 2008 IEEE important for music perception by CI users, 5 because even the best-performing CI users appear unable to use more than seven to 10 channels of spectral information.6 A recent study of two stimulation strategies that don’t include fine-phase-timing information—the Advanced Combination Encoder (ACE) and Spectral Peak (Speak) strategies— confirms that music appreciation is less than satisfactory even with the latest implants.7 Consequently, researchers have recently proposed several strategies, in addition to AIS, for delivering finephase-timing information in CI stimulation. These include frequency amplitude modulation encoding (FAME)8 and peak-derived timing (PDT). 9 However, none of these have successfully presented fine-phase-timing information to CI users in a way that can improve music perception. Hence, further tests on CI users are necessary to investigate each technique’s efficacy. Our 16-channel cochlear-implant processor implements our earlier AIS algorithm.4 This processor moves the AIS strategy a step closer to testing on CI users. It is suitable for encoding music, and it operates with very low power consumption because of its use of analog processing techniques.10,11 The AIS algorithm allows high-rate sampling of high-intensity channels while maintaining a low average rate of sampling for all channels, thus allowing lower stimulation power as well.4 Analog versus digital We estimate that an A/D-then-DSP implementation of traditional cochlearimplant processing would use about 0.25 mW to 0.5 mW for the microphone front end and A/D converter, and use 250 W/MIP × 20 MIPS = 5 mW for the other processing, yielding a total power consumption of about 5.5 mW. These numbers are representative of state-of- JANUARY–MARCH 2008 the-art cochlear-implant processing, although many commercial processors’ power consumption is significantly worse because of various system inefficiencies. The power consumption for stimulation can range from 1 mW to 10 mW, depending on the patient and stimulation strategy. Our algorithm’s digital implementation, unlike that of a traditional processing algorithm, will likely be extremely power hungry, owing to its need for asynchronous processing and high-speed sampling of certain channels. Our analog, 357 W processor can improve performance, reduce processing power consumption by more than an order of magnitude, and significantly lower stimulation power consumption. This processor makes a fully implantable system feasible and practical. Thanks to the use of analog processing, its effective computational efficiency is between 1 W/MIP and 5 W/MIP in a 1.5 m process. This is considerably better than even the most power-efficient DSPs, dominated by switching capacitance only in the DSP core, implementing their most favorable applications, and implemented in consumption of a very low-power microphone front end, anti-alias filter, and A/D converter would still likely exceed 357 W. Moreover, A/D scaling in speed, power, and precision is far slower than Moore’s law, and some circuits in our analog implementation could also benefit from these improvements. A custom digital solution would certainly narrow the gap between a DSP’s and our processor’s power consumption, but the high cost of the A/D converter, the microphone, and the asynchronous processing in the digital domain would still give our analog processor a significant advantage. It’s useful to understand why our processor operates more efficiently than an A/D-then-DSP implementation. An A/D converter immediately creates a representation of the incoming information as a series of relatively highprecision and high-speed numbers (16 bits at 44 KHz is typical in such applications) that by themselves carry very little meaningful information. This digitization consumes considerable power because doing any task with high speed and high precision is expensive. (High precision is necessary if an operation Our cochlear-implant processor operates with very low power consumption because of its use of analog processing techniques. an advanced submicron process. The effective computational efficiency for such DSPs is between 50 W/MIP and 100 W/MIP. Needless to say, the efficiency for DSPs will continually improve with Moore’s law, but such improvements are increasingly more modest. Even if we generously assume that the power consumption of the DSP is actually zero at the end of Moore’s law, the power requires a wide dynamic range and all computations, including gain control, are performed in the digital domain. High speed is necessary to avoid aliasing.) Then, a DSP takes all these numbers and crunches them with millions of multiply-accumulate operations per second, burning power in several switching transistors. It finally extracts more meaningful log spectral-energy information—but, because of speech data’s P ER VA SI V E computing 41 implantable electronics 18 18 Spike output 16 14 14 12 12 Channel no. Channel no. 16 HWR filter output 10 8 8 6 4 4 2 2 0.330 0.335 (a) 0.340 Time (s) 0.345 0.350 0 0.325 0.355 Inhibition current 10 6 0 0.325 Capacitor voltage 0.330 (b) 0.335 0.340 Time (s) 0.345 0.350 0.355 Figure 1. Matlab simulation of the asynchronous interleaved sampling (AIS) algorithm: (a) the half-wave-rectified (HWR) filter outputs as inputs to the algorithm (dashed black lines) and the spike outputs (solid red lines); (b) the algorithm’s internal state variables, including the neuronal capacitor voltage (solid blue) and the inhibition current (dashed green). The AIS algorithm turns on an inhibition current as soon as a spike (pulse) fires. high variability, at a far slower rate of 100 Hz to 1 KHz in 16 parallel bands and at 6-bit-to-8-bit precision. In contrast, analog preprocessing lets our processor efficiently compress the incoming data such that low-speed and low-precision A/D converters at a later stage of the computation quantize the meaningful information. Some of our prior work analyzes the optimal point for digitizing information in more general systems.12 Too much analog preprocessing before digitization is inefficient because the costs required to maintain precision begin to rise steeply. Too little analog preprocessing before digitization is inefficient because the digital system ignores analog degrees of freedom that can be exploited to improve computational efficiency. Analog systems are more efficient than digital systems at low output precision, whereas digital systems are more efficient than analog systems at high output precision.12 In our processor, the output precision in each channel is 7 bits, and we intentionally limited the maximum output firing rate to 1 KHz, to lower stimulation power and to 42 P ER VA SI V E computing avoid a firing rate in the auditory nerve that is limited to the refractory period of recovery (when the nerve is overstimulated at a rate that is too high). Our processor’s internal dynamic range (IDR) is near 55 dB, with gain control allowing 75 dB of input dynamic range. An analog solution can therefore compete with a digital solution if the entire system maintains the necessary precision. If a task required 14 bits of output precision, 72 dB IDR and 100 KHz bandwidth at each channel, the A/Dthen-DSP strategy would definitely be more efficient than our solution. An analog solution must preserve its efficiency advantage by carefully monitoring robustness (that is, immunity or insensitivity to process variation, power supply noise, crosstalk between signals, and pickup of other interfering noise sources). Such robustness need not be present in every device and every signal, as in a digital solution, but only at important locations in the signal-flow chain, where it truly matters. Our processor is robust in the face of power-supply noise, thermal noise, temperature variations, and transistor mismatches, owing to its use of feedforward and feedback calibration circuits, robust biasing techniques, and careful analog design. Thus, an analog system addresses the robustness-efficiency trade-off very differently than a digital system does. Programmability is certainly not as great in an analog system as in a digital one. However, as in our case, this is less of an issue when implementing an algorithm that’s known to work. Our processor’s programmability of 165 parameters with 546 bits allows sufficient but not excessive programmability. Our processor’s efficiency is high because it exploits the transistor’s analog degrees of freedom for computation without treating it as a mere switch. The AIS algorithm This algorithm uses half-wave-rectified (HWR) and phase-locked current outputs from spectral-analysis channels to charge an array of neuronal capacitors that compete with one another in a race-to-spike paradigm: The first neuron to reach a fixed voltage threshold wins the race and gets to fire a spike www.computer.org/pervasive Bandpass filter channel 1 Envelope detector HWR magnitude 55 dB internal dynamic range FG3329 Microphone Preamplifier 75 dB overall dynamic range Broadband automatic gain control Bandpass filter channel 2 AIS circuit Envelope detector HWR magnitude . . . . . . Bandpass filter channel 16 Log A/D Log A/D AIS circuit . . . Envelope detector HWR magnitude Log A/D AIS circuit 7 bits at 1 KHz Tristates Vo1 output pulse 7 bits at 1 KHz Tristates Output bus Vo2 output pulse . . . 7 bits at 1 KHz Tristates Vo16 output pulse Figure 2. The AIS processor. The FG3329 microphone picks up sound, which goes through a preamplifier and then to a broadband automatic gain control (AGC) circuit. The AGC compresses this sound and converts the input dynamic range of 75 dB to an internal dynamic range of 55 dB. A bank of bandpass filters then filter the AGC’s compressed output. Envelope detectors perform rectification and peak detection on the filter outputs to create inputs for the AIS circuit and log A/D (analog/digital) blocks, respectively. The AIS circuit then generates the asynchronous timing events, while the log A/D converter digitizes the envelope of each channel. (pulse). Thus, the AIS algorithm prevents simultaneous channel stimulation, to avoid spectral smearing through electrode interactions.13 Once a spike fires, all the capacitors reset, and the race to spike begins again, except that the algorithm applies a negative current to the neuron that just spiked, to inhibit it from winning in subsequent races. This inhibition current remains active for the duration of a predetermined relaxation time constant. The algorithm thereby enforces a minimum interspike interval, which the relaxation time constant sets. This prevents the maximum stimulation rate from ever exceeding the refractory rate of neuronal recovery, which would otherwise cause unnatural distortions in the temporal discharge patterns of cochlear implants. However, stimulation is not constrained to fire only at the maximum rate. The algorithm naturally adapts the stimulation rate (effectively, the rate at which the algorithm samples the input) in both time and spectral space to the signal’s information content, so that the JANUARY–MARCH 2008 processor doesn’t spend any power during quiet periods or on quiet channels. Therefore, high-intensity channels win the race to spike more frequently and are sampled at a high phase-encoded rate, whereas low-intensity channels win less frequently and are sampled at a lower phase-encoded rate. This adaptable stimulation rate lowers the average stimulation power and allows more natural, asynchronous stimulation of the auditory nerve.4 Figure 1 shows a M atlab simulation of the AIS algorithm on a segment of speech. The AIS processor Figure 2 shows a block diagram of the AIS processor, which implements the AIS algorithm, building on our prior work.10,11 We modified the envelope detector in our prior work so that it could quickly output HWR currents to the AIS circuit. When a spike fires, the spike activates tristate buffers within the winning channel to report the log envelope amplitude as a 7-bit digital number onto a common output bus, thus providing both amplitude information and fine-phase-timing information in a single output event. The only constraint on the rate of spikes arriving from multiple channels onto the output bus is that they not overlap. Hence, our 16-channel analog AIS processor provides high temporal resolution, without the need for a high-rate sampling clock that constantly runs whether or not events occur. Figure 3 shows a 16-channel, voltage-mode winner-take-all (WTA) circuit that forms the AIS circuit’s core by detecting the first channel whose neuronal state variable, Vix, crosses a fixed voltage threshold, Vthresh. (Throughout our description, the letter x in a signal variable denotes the signal variable corresponding to a channel with a channel number x. The value of x can range from 1 to 16.) Output voltage Vox goes high only in the winning channel, thereby suppressing all other channel outputs from rising by pulling up strongly on the common source voltage Vs through positive feedback in the P ER VA SI V E computing 43 implantable electronics T103 T104 T1603 T1604 T105 T1601 Vi16 ... Vo1 Vs Channel 1 T114 ... T115 l in V8 Channel 16 Vthresh T1614 Vncasc Ib ↓ T1615 ... l pota Vsink T015 la + lr ↓ Tx24 Vpcasc T001 Vo16 ↓ Tx22 ↓ Tx03 Tx04 Tx23 Tx06 Tx25 Tx05 Vpcasc Translinear current gain T1602 l3 ↓ Tx21 T005 Vpcasc T102 Figure 3. The voltage-mode winnertake-all (WTA) circuit that implements the AIS algorithm. T004 T1605 Vpcasc T101 Vi1 T003 Tx01 Tx02 Vox Tx32 lo ↓ Tx31 VinhTH Vix Tx11 Cin Tx10 Vs Vax Tx07 Vhx Vrx Tx08 Tx33 Tx09 Tx34 Cr Reset Tx12 l2 ↓ Tx13 lr Tx14 Tx15 ↓ Vncasc Vsink Figure 4. One channel of the AIS circuit, with the attack-and-release subcircuit shown in bold. loop of transistors Tx02 , Tx03, Tx04, and Tx05. The current sink gate voltage Vsink, which falls in the vicinity of a threshold crossing, reduces the pull-down current from all the Tx15 transistors. This action 44 P ER VA SI V E computing enhances the circuit’s positive-feedback loop gain, making it greater than that of an earlier voltage-mode WTA circuit that Gert Cauwenberghs and Volnei Pedroni described.14 When a channel wins and Vox rises, signaling an asynchronous firing event, a method of setting a one-shot pulse width on Vox is required. It’s also necessary to immediately inhibit the winning channel from firing again until after an absolute refractory period. Figure 4 shows a single channel of the AIS circuit. The attack-and-release subcircuit (shown in bold in the figure), defines both Vox pulse width Ta and the absolute refractory period of inhibition Tr immediately after a pulse fires. This subcircuit works as follows: A twotransistor superbuffer of cascaded n and p source followers (Tx07 and Tx08 in figure 4) is biased with a large pullup current Ia and a small pull-down current Ir. By design, the superbuffer output voltage Vax initially sits below comparator input threshold voltage VinhTH , so comparator output voltage Vhx is low, and devices Tx10 and Tx11 are off. At the rising edge of Vox, Vax initially undershoots because Tx07 shorts out the threshold drop on Tx08 such that Vax falls to approximately the value of the release voltage Vrx. Current Ia then charges up the release capacitor C r, and Vax ramps up from a minimum value until it crosses VinhTH and causes Vhx to go high, turning on Tx10 and Tx11 and terminating the pulse by pulling Vox low again. Fixing C r and VinhTH lets us make pulse width Ta programmable by varying Ia. The pulse width’s programmability is necessary to accommodate different time profiles for charge transfer in each stimulation event. Turning on Tx10 and Tx11 pulls Vox low and inhibits input voltage Vix from rising. Upon the falling edge of Vox, Tx07 shuts off, causing Vax to step back up to a threshold drop above Vrx. Vax then follows Vrx, which ramps down as Ir discharges C r. The inhibition from Vhx, therefore, remains high until Vax falls below VinhTH again, and the time www.computer.org/pervasive Superbuffer output, Va (V) Figure 5. Measured chip waveforms showing the range of programmability in the AIS circuit: (a) superbuffer output voltage Va waveforms with increasing pulse width Ta and absolute refractory period of inhibition Tr, where I a is the pull-down current and I r is the pull-up current; (b) input voltage V i waveforms with increasing current gain A, where I 3 is the parameter used to set A. (a) JANUARY–MARCH 2008 VinhTH = 1.1 V l a = 0, l r = 7 l a = 3, l r = 5 l a = 5, l r = 3 l a = 6, l r = 2 Ta 0 Tr 0.2 0.4 0.6 0.8 1.0 Time (ms) 1.2 1.4 1.6 1.8 1.5 Capacitor voltage, Vi (V) it takes to do so sets Tr, programmable by varying Ir. Programmability in Tr is necessary to enforce a minimum interpulse interval, which prevents a channel that has just won the race from immediately winning again. This programmability is also necessary for setting a minimum refractory period, which allows the auditory nerves stimulated by the winning channel to recover. To perform pre-emphasis or equalization across channels, which might be necessary due to patient variability or fabrication offsets, a translinear input stage programs the effective threshold in each channel by varying the current gain, A, applied to each input. Rather than fixing A and varying Vthresh across channels, we equivalently fix Vthresh and vary A. Because PMOS (p-channel metal-oxide semiconductor) devices Tx21, Tx22 , Tx23, and Tx24 are biased below threshold, the translinear loop yields output current Io as Iin(I2/I3); thus, A = I2/I3, and we make A programmable by fixing I2 and varying I3. The AIS algorithm requires resetting all input capacitors, Cin, to ground whenever a stimulation pulse is generated. A reset digital signal, which is a Schmitt-triggered, buffered version of analog signal Vs, accomplishes this resetting. Thus, Cin discharges through Tx09 when Vs goes high, for a stimulation pulse’s duration. We program Ia, Ir, and I3 using 3-bit current D/A converters. Figure 5 shows the range of programmability in the AIS circuit from measured chip waveforms. The chip has a total of 546 programmable 2.0 1.8 1.6 1.4 1.2 1.0 0.8 0.6 0.4 0.2 0 –0.2 (b) l3 = 0 l3 = 3 l3 = 4 l3 = 5 l3 = 7 1.0 0.5 0 –0.5 Vthresh = 1.1 V Reset –0.4 –0.3 bits, allowing the adjustment of 165 spectral-analysis and AIS parameters through a three-wire serial peripheral interface. We employed robust biasing of D/A currents, immune to both power supply noise and temperature, as described in our earlier work.10,11 Performance comparisons We played various sound clips from the computer into the AIS processor, and we recorded the asynchronous stimulation pulses along with their 7bit log envelope values. One of these clips, taken from Handel’s Messiah, was analyzed by a bandpass filter bank in M atlab that was mathematically equivalent to the filters on the chip. Figure 6a shows this clip as a spectrogram. Figure 6b shows the asynchronous spike pulses scaled by the log envelope energy, which we reconstructed into a continuous-time signal (shown in figure 6c) using low-pass filtering.4 As the spectrograms show, the chip reconstruction matches the ideal M atlab simulation very well. Figure 7 compares the performance –0.2 Time (ms) –0.1 0 0.1 of the AIS processor (tested with various speech and music sound clips), an ideal M atlab AIS simulation, and a traditional non-phase-based tone-vocoding simulation representing continuous-interleaved-sampling (CIS) synchronous stimulation. The tonevocoding simulation represents only a traditional CIS strategy; to achieve higher performance, most modern cochlear implants implement more sophisticated strategies, which could be based on CIS7 or on some other sampling technique. 9 Nevertheless, cochlear implant simulations are still helpful for normal-hearing listeners to gauge the best possible outcomes in CI users. The reason is that electrical stimulation creates many artificial problems, such as cross-fiber synchrony and perceptual dissonance,15 that don’t exist in natural acoustic stimulation. In Figure 7a, we correlated the sound reconstruction (given by the summation of all channels) with the original sound signal, and the vertical bars represent the correlation coefficient, r. A high correlation coefficient between P ER VA SI V E computing 45 implantable electronics 16 14 Channel no. 12 10 8 6 4 2 0 (a) 0.2 0.4 0.6 0.8 Time (s) 1.0 1.2 1.4 16 N=0 N=0 N = 137 N = 277 N = 808 N = 654 N = 670 N = 1,252 N = 1,098 N = 1,300 N = 929 N = 875 N = 810 N = 866 N = 318 N = 295 14 Channel no. 12 10 8 6 4 2 0 (b) 0.2 0.4 0.6 0.8 Time (s) 1.0 1.2 1.4 16 r = NaN r = NaN r = 0.01 r = 0.03 r = 0.00 r = 0.15 r = 0.08 r = 0.39 r = 0.11 r = 0.04 r = 0.50 r = 0.57 r = 0.28 r = 0.31 r = 0.82 r = 0.64 14 Channel no. 12 10 8 6 4 2 (c) 46 f = 6,280 Hz f = 5,214 Hz f = 4,132 Hz f = 3,126 Hz f = 2,595 Hz f = 1,963 Hz f = 1,556 Hz f = 1,233 Hz f = 1,123 Hz f = 933 Hz f = 739 Hz f = 586 Hz f = 486 Hz f = 385 Hz f = 266 Hz f = 183 Hz 0 0.2 0.4 P ER VA SI V E computing 0.6 0.8 Time (s) 1.0 1.2 1.4 Figure 6. Spectrograms comparing (a) an ideal Matlab simulation of the bandpass filter outputs in each channel, where f indicates the center frequency of each filter; (b) asynchronous spike outputs from the AIS processor, where N is the number of spikes recorded in that channel; (c) spike-reconstructed filter outputs from the AIS processor, where r shows the correlation coefficient of each channel ranging from 0 to 1, or NaN (meaning “not a number,” resulting from N in that channel being 0). Note that fine phase-timing information is preserved. (Sound source: 1.46 s of the Hallelujah chorus from Handel’s Messiah.) the reconstruction and original sound captures the fidelity of both envelope and fine-phase-timing preserved in the signal.4 A high correlation coefficient can also predict a normal-hearing listener’s increased ability to recognize words and music while listening to a reconstruction. The AIS processor’s correlation coefficients are comparable to those from the M atlab AIS simulation. Thus, the AIS processor, unlike traditional CIS, encodes fine-phasetiming information, which is necessary for preserving music. Figure 7b compares the average firing rate (AFR) of the AIS processor, the ideal AIS M atlab simulation, and the CIS tone-vocoding simulation. The CIS stimulation rate is the fixed rate at which a conventional CIS processor samples the envelope of each analysis channel. In practice, clinicians typically set this fixed rate to between 800 Hz and 2.5 KHz and then adjust it to maximize performance.1 So, for comparison purposes, we chose a rate of 2 KHz in figure 7b. AIS achieves a lower AFR than conventional CIS, without compromising signal fidelity; in fact, AIS increases this fidelity. Hence, the AIS processor demonstrates that adapting the sampling rate to the signal’s needs can substantially save stimulation power. This benefit comes at the cost of increased signal-processing www.computer.org/pervasive 2,000 1,800 0.50 1,600 Average firing rate (Hz) Coefficient of correlation with original sound, r 0.60 0.40 0.30 0.20 1,400 1,200 1,000 800 600 400 0.10 200 0.00 “die” “buy” (a) Handel chorus Jazz Blues “die” (b) Sound clip AIS processor 0 Beethoven symphony “buy” Handel chorus Jazz Blues Beethoven symphony Sound clip AIS MATLAB simulation CIS tone-vocoding simulation Figure 7. Performance comparison between the AIS processor outputs, an ideal AIS simulation in Matlab, and a traditional tonevocoding simulation representing traditional synchronous continuous-interleaved-sampling (CIS) stimulation that doesn’t preserve phase information: (a) coefficients of correlation between signal reconstruction and original sound using each method; (b) average rates of stimulation using each method. Power-supply-immune biasing Automatic gain control Figure 8. Die photo of the AIS processor, showing the various blocks. Microphone preamplifier AIS output tristates AIS output tristates AIS circuit JANUARY–MARCH 2008 Log A/D Bandpass filters Envelope detectors Local bias distribution circuits Log A/D AIS circuit power. However, in our analog implementation with the AIS processor, the increase is a modest 106 W (or 6.6 W per channel) over our analog CIS processor, which consumes 251 W.10 Figure 8 shows a die photo of the 9.23 mm × 9.58 mm AIS processor, with labels describing the various blocks. The entire processor, built in a 1.5 m process, consumes 357 W. This is very efficient compared to typical A/D-then-DSP cochlear-implant processors, which often consume 5 mW or more. T he AIS processor demonstrates an example of how simple analog circuit-building blocks can help implement a complex signal-processing P ER VA SI V E computing 47 implantable electronics the Authors Ji-Jon Sit is an RFIC and systems engineer at Advanced Bionics. He completed the work described in this article while pursuing his PhD at the Massachusetts Institute of Technology. His research interests focus on emerging cochlear implant technology. He received his PhD in electrical engineering from MIT. Contact him at Advanced Bionics Corp., 12740 San Fernando Rd., Sylmar, CA 91342. Rahul Sarpeshkar heads a research group on Analog VLSI and Biological Systems on the faculty of the Electrical Engineering and Computer Science Department at the Massachusetts Institute of Technology. His research interests include analog and mixed-signal VLSI, biomedical systems, ultralow-power circuits and systems, biologically inspired circuits and systems, molecular biology, neuroscience, and control theory. He received his PhD in computation and neural systems from the California Institute of Technology. He is an associate editor of IEEE Transactions on Biomedical Circuits and Systems. Contact him at Massachusetts Inst. of Technology, 77 Massachusetts Ave., Cambridge, MA 02139; [email protected]. IEEE algorithm with minimal resources of power and silicon area. In this example, the implemented algorithm is one that encodes music and lowers stimulation power, making fully implanted cochlear implants with good performance possible. Future work needs to combine work such as ours with other improvements to allow fully implanted systems to enter clinical practice. These improvements include lowering electrode impedances to further reduce stimulation power, improving the performance of implantable microphones to a level that is comparable to highquality external microphones, and reducing spectral and temporal smear- THE #1 ARTIFICIAL INTELLIGENCE MAGAZINE! 48 P ER VA SI V E computing ing due to current-spreading interactions among electrode channels. References 1. P.C. Loizou, “Mimicking the Human Ear,” IEEE Signal Processing Magazine, vol. 15, no. 5, 1998, pp. 101–130. 2. J.W. Picone, “Signal Modeling Techniques in Speech Recognition,” Proc. IEEE, vol. 81, no. 9, 1993, pp. 1215–1247. 3. H.J. McDermott, “Music Perception with Cochlear Implants: A Review,” Trends in Amplification, vol. 8, no. 2, 2004, pp. 49–82. Cochlear Implants that Encodes Envelope and Phase Information,” IEEE Trans. Biomedical Eng., vol. 54, no. 1, 2007, pp. 138–149. 5. Z.M. Smith, B. Delgutte, and A.J. Oxenham, “Chimaeric Sounds Reveal Dichotomies in Auditory Perception,” Nature, 7 Mar. 2002, pp. 87–90. 6. L.M. Friesen et al., “Speech Recognition in Noise as a Function of the Number of Spectral Channels: Comparison of Acoustic Hearing and Cochlear Implants,” J. Acoustical Soc. of America, vol. 110, no. 2, 2001, pp. 1150–1163. 7. V. Looi et al., “Comparisons of Quality Ratings for Music by Cochlear Implant and Hearing Aid Users,” Ear and Hearing, vol. 28, no. 2, 2007, pp. 59S–61S. 8. K. Nie, G. Stickney, and F.-G. Zeng, “Encoding Frequency Modulation to Improve Cochlear Implant Performance in Noise,” IEEE Trans. Biomedical Eng., vol. 52, no. 1, 2005, pp. 64–73. 9. A.E. Vandali et al., “Pitch Ranking Ability of Cochlear Implant Recipients: A Comparison of Sound-Processing Strategies,” J. Acoustical Soc. of America, vol. 117, no. 5, 2005, pp. 3126–3138. 10. R. Sarpeshkar et al., “An Analog Bionic Ear Processor with Zero-Crossing Detection,” Proc. IEEE Int’l Solid-State Circuits Conf. (Isscc 05), IEEE Press, 2005, pp. 78–79. 4. J.-J. Sit et al., “A Low-Power Asynchronous Interleaved Sampling Algorithm for 11. R. Sarpeshkar et al., “An Ultra-LowPower Programmable Analog Bionic Ear Processor,” IEEE Trans. Biomedical Eng., vol. 52, no. 4, 2005, pp. 711–727. IEEE Intelligent Systems delivers the latest peer-reviewed research on all aspects of artificial intelligence, focusing on practical, fielded applications. Contributors include leading experts in 12. R. Sarpeshkar, “Analog Versus Digital: Extrapolating from Electronics to Neurobiology,” Neural Computation, vol. 10, no. 7, 1998, pp. 1601–1638. • Intelligent Agents • The Semantic Web • Natural Language Processing • Robotics • Machine Learning Visit us on the Web at www.computer.org/intelligent 13. B.S. Wilson et al., “Better Speech Recognition with Cochlear Implants,” Nature, 18 July 1991, pp. 236–238. 14. G. Cauwenberghs and V.A. Pedroni, “A Charge-Based CMOS Parallel Analog Vector Quantizer,” Proc. Advances in Neural Information Processing Systems 7 (NIPS 94), MIT Press, 1994, pp. 779– 786. 15. G.E. Loeb, “Are Cochlear Implant Patients Suffering from Perceptual Dissonance?” Ear and Hearing, vol. 26, no. 5, 2005, pp. 435–450. www.computer.org/pervasive