Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Ground vehicle system dynamics – 2
Prof. R.G. Longoria
Spring 2016
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin
Wheels rolling and slipping
• In rolling problems, first assume there is pure rolling (no slip),
constraining translation and rotation. This requires a check to
see if the actual friction force is less than the static friction
force, otherwise the wheel is actually slipping and the problem
needs to be re-solved.
• For planar rolling motion, apply two equations for translation
and one for rotation. This leads to four unknowns: friction
force, normal force, translational acceleration, rotational
acceleration (or momentum/velocity states).
• During slip, the friction force can be estimated as µN,
considering either a static or kinetic friction coefficient.
• Review some basic models for rolling cylinders in Ogata and
Hibbeler handouts
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin
Example: a rigid wheel being pulled in pure roll, planar motion
A homogeneous wheel of radius R and mass m is initially at rest on a rough horizontal surface. An
external force F is applied at the top rim of the wheel as shown. Assuming the wheel rolls without
sliding, find the magnitude and direction of the static friction force.
z
F
pɺ x = mvɺx = mxɺɺ = F − Fs
pɺ z = mvɺz = N − W = 0
hɺy = J ωɺ y = Jθɺɺ = FR + Fs R
x
m, J
R θ
FBD:
W
Fs
Assume static force is in direction shown in FBD. Then,
F
Since the cylinder rolls without sliding,
W = mg
mRθɺɺ = F − Fs
Jθɺɺ = R( F + F )
N
s
1
2
x = Rθ
(or, vɺx = Rθɺɺ)
mR 2
( F − F )s = R( F + Fs )
mR
( F − Fs ) = 2( F + Fs ) ⇒ Fs = −
1
F
3
Magnitude is less than F, so no slip assumption ok, but opposite direction. Compare to example in
Ogata handout where force is applied through center.
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin
Example: wheel rolling down incline with friction
A homogeneous wheel of radius R and mass m moves down an incline with inclination α. Find the
angle α for which the wheel moves without sliding (or skidding).
m, J
z
When the wheel rolls without sliding (or slip),
θ
x
α
z
W
x
F
N
pɺ x = mvɺx = mxɺɺ = mg sin α − F
pɺ z = mvɺz = mzɺɺ = N − W = N − mg cos α = 0
hɺy = J ωɺ y = Jθɺɺ = FR
If the wheel rolls without slip, x = Rθ
J = 12 mR 2
ɺɺ
x
J
1
ɺɺ
x = Rθɺɺ ⇒ J = FR ⇒ F = 2 ɺɺ
x = mxɺɺ
R
R
2
1
2
∴ mxɺɺ = mg sin α − mxɺɺ ⇒ ɺɺ
x = g sin α
2
3
1
1
∴ F = mxɺɺ = mg sin α < µk N = µk mg cos α
2
3
The dynamic equations are:
R
θ
F < µk N = µk mg cos α
α
This means that the friction force during sliding is bounded by the static friction force and the rolling
friction force, and you can show:
1
3
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
tan α < µk < µs Defines the no-slip condition for α.
Department of Mechanical Engineering
The University of Texas at Austin
wheel
wheel
Always >0
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin
Example: Consider 3 cases and define ‘slip’ variable
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin
Classical steering mechanisms
5th wheel
steering
δ H = 'hand wheel' angle
‘turntable steering’
•Likely developed by the Romans, and preceded only by a 2
wheel cart.
•Consumes space
•Poor performance – unstable
•Longitudinal disturbance forces have large moment arms
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
•Articulated-vehicle steering
•Tractors, heavy industrial
vehicles
Department of Mechanical Engineering
The University of Texas at Austin
Yaw on purpose: common steering mechanisms
Differential steer
Tricycle
‘Ackermann’-type
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin
Differentially driven mobile robots
DaNI 1.0
DaNI 2.0
DC motors
•Motor: Tetrix DC
•Gear Ratio: 2:1
•Shaft Diameter: 4.73 mm
•Wheel Diameter: 100 mm
•Wheel base: 133 mm.
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Omni-directional wheel
Department of Mechanical Engineering
The University of Texas at Austin
Differential steering is very common. Why?
• Simple mechanism
• Does not take up a lot of space (e.g., used even
for some larger, full-scale vehicles)
• There are disadvantages (tear up the terrain,
wear on system, tires, etc.)
Sliding pivot
Realized as a caster?
Discuss how forces are induced by these types of wheels.
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin
Model of differentially-steered (DS), single-axle vehicle in
For the simple vehicle model shown to the left,
planar motion
assume negligible forces at point A. This could
be a pivot, caster, or some other omni-directional
type wheel.
Y
Assume the wheels roll without slip and cannot
slip laterally.
A
Designate the right wheel ‘1’ and the left ‘2’, and
define: v = R ω Velocities at
1x
w
1
v2 x = Rwω2 each wheel
X
ω1 = right wheel angular velocity
ω2 = left wheel angular velocity
Rw = wheel radius
Velocity
vector
vx
qɺ = v y
ω z
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Then, show that the vehicle velocities at the CG
in the body-fixed frame:
vx =
1
2
( v1 + v2 ) = 12 Rw (ω1 + ω2 )
(longitudinal
velocity)
Since the velocity along the rear axle is
constrained to be zero, you can show that,
v y = l2ω z
(lateral velocity)
Rw
ω
=
(ω1 − ω2 )
Yaw rate is
z
B
Department of Mechanical Engineering
The University of Texas at Austin
Kinematic 2D model for DS vehicle in inertial frame
†
Find this vehicle’s kinematic state in the inertial frame, q I = [ X Y ψ ]
Y
You can transform the velocities in the local (body-fixed)
x
y
reference frame into the inertial frame using the rotation matrix,
l2
l1
ψ
cosψ
R (ψ ) = − sinψ
0
X
B
sinψ
cosψ
0
0
0
1
or, specifically,
X
So velocities in the global reference frame are found from,
Xɺ
cosψ
qɺ I = Yɺ = R (ψ )† ⋅ qɺ = sinψ
ψɺ
0
− sinψ
cosψ
0
0 vx
0 v y
1 ω z
So, for the single-axle vehicle, the
velocities in the inertial frame can
be found in terms of the wheel
velocities, and these equations must
be integrated to find the positions
and orientation.
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin
Example: Special case of DS single-axle vehicle with CG on axle
For a kinematic model of a differentially-driven vehicle, we assume there is no slip, and that
the wheels have controllable speeds, ω1 and ω2. If the CG is on the (rear) axle,
Y
x
y
ψ
l1 = L
l2 = 0
B = track width
X
the velocities in the global reference frame are,
Note: this defaults to a common ‘mobile robot’ model seen throughout robotics literature.
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin
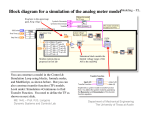
Simulation of the DS single-axle vehicle trajectory
Matlab to compute and plot vehicle CG trajectory is provided below.
% Differentially-steered kinematic vehicle model
% Requires right (#1) and left (#2) wheel velocities, omegaw1 and omegaw2,
% as controlled inputs for single axle, to be passed as global parameters
% Wheel radius, R_w, and axle track width, B, are also required
% Updated 2/20/12 RGL
function Xidot = DS_vehicle(t,Xi)
global R_w B omegaw1 omegaw2
X = Xi(1); Y = Xi(2); psi = Xi(3);
% NOTE: these are global coordinates
% These equations assume CG on single axle
Xdot = 0.5*cos(psi)*R_w*(omegaw1+omegaw2);
Ydot = 0.5*sin(psi)*R_w*(omegaw1+omegaw2);
psidot = R_w*(omegaw1-omegaw2)/B;
Vehicle trajectory in XY
Xidot=[Xdot;Ydot;psidot];
% test_DS_vehicle.m
clear all
global R_w B omegaw1 omegaw2
% Rw = wheel radius, B = track width
% omegaw1 = right wheel speed
R_w = 0.05; B = 0.18;
omegaw1 = 4; omegaw2 = 2;
Xi0=[0,0,0];
[t,Xi] = ode45(@DS_vehicle,[0 10],Xi0);
N = length(t);
figure(1)
plot(Xi(:,1),Xi(:,2)), axis([-1.0 1.0 -0.5 1.5]), axis('square')
xlabel('X'), ylabel('Y')
‘Open loop’
constant wheel
velocities
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin
One last set of problems to review.
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin
Example: Karnopp and Margolis P1.11
(cf. Karnopp & Margolis,
eqs. 1.18)
Vp = Vo + Ω× R
ɺ Ap = A0 + Ω× R + Ω× Ω× R
(
y
w
2
vy
l2
ωz
l1
x
vx
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
δ
Department of Mechanical Engineering
The University of Texas at Austin
)
Solution from
Karnopp & Margolis
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin
Example: Karnopp and Margolis P1.12
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin
Solution from
Karnopp & Margolis
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin
Summary
• This review continued on a discussion of dynamics relevant to
study ground vehicles.
• Wheels rolling and slipping play a key role, and basic problems
involving friction were discussed.
• Looked at very basic steering under the assumption that the
vehicle motion would follow a kinematic model, presented
models and a simulation to illustrate the results.
• An additional turning vehicle that illustrates the role of basic
kinematic relations.
ME 360/390 – Prof. R.G. Longoria
Cyber Vehicle Systems
Department of Mechanical Engineering
The University of Texas at Austin