Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
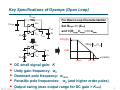
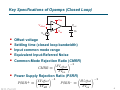
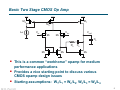
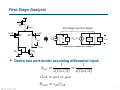
Analysis and Design of Analog Integrated Circuits Lecture 17 Basic Two Stage CMOS Opamp Michael H. Perrott April 4, 2012 Copyright © 2012 by Michael H. Perrott All rights reserved. M.H. Perrott Opamps Are Basic Analog Building Blocks Analog Filters Current References Switched Capacitor Circuits C2 C1 Iref R1 Vin Vout Vin Vref Vref Vout C1 Vref Rref Enable active filters - Can achieve arbitrary pole/zero placement using only capacitor/resistor networks around the opamp Allow accurate voltage to current translation Provide accurate charge transfer between capacitors - Extremely useful for switched capacitor circuits used in analog-to-digital converters and discrete-time analog filters M.H. Perrott 2 Key Specifications of Opamps (Open Loop) Rhuge For Open Loop Characterization Vdd Chuge Vout Vin Vss CL Zout Set Rhuge >> |Zout| and 1/(RhugeChuge) << wdom 20log(K) 20log Vout/Vin Vdd Vout Vin Vss 0dB CL wdom w0 wp w (rad/s) DC small signal gain: K Unity gain frequency: w0 Dominant pole frequency: wdom Parasitic pole frequencies: wp (and higher order poles) Output swing (max output range for DC gain > Kmin) M.H. Perrott 3 Key Specifications of Opamps (Closed Loop) Vdd Voffset Vin Vout Vss CL Offset voltage Settling time (closed loop bandwidth) Input common mode range Equivalent Input-Referred Noise Common-Mode Rejection Ratio (CMRR) à !−1 δVoffset CMRR = δVin Power Supply Rejection Ratio (PSRR) à !−1 à !−1 δVoffset δVoffset − + PSRR = PSRR = δVdd δVss M.H. Perrott 4 Slew Rate Issues for Opamps Vin Vdd Vout Vin Vss CL ideal Vout slew-rate limited Output currents of practical opamps have max limits - Impacts maximum rate of charging or discharging load capacitance, C - For large step response, this leads to the output lagging L behind the ideal response based on linear modeling We refer to this condition as being slew-rate limited Where slew-rate is of concern, the output stage of the opamp can be designed to help mitigate this issue - Will lead to extra complexity and perhaps other issues M.H. Perrott 5 Basic Two Stage CMOS Op Amp M8 M7 M5 Iref Vin- M1 Vin+ M2 Vout CL Rc M3 M4 Cc M6 This is a common “workhorse” opamp for medium performance applications Provides a nice starting point to discuss various CMOS opamp design issues Starting assumptions: W1/L1 = W2/L2, W3/L3 = W4/L4 M.H. Perrott 6 First Stage Analysis M5 -vid/2 M1 Ibias1 First Stage Two-Port Model vid/2 M2 vid Rout1 V1 Zin Gm1V1 Rout1 Zin2 vout1 vout1 M3 M4 Derive two port model assuming differential input: 1 1 = Zin1 = s(Cgs1/2) s(Cgs2/2) Gm1 = gm1 = gm2 M.H. Perrott Rout1 = ro2 ||ro4 7 Derivation of Rout1 (Incorrect Approach) ro5 -vid/2 M1 vid/2 M2 ro2 (1+gm2 1 ) gm1 ro4 1 gm3 2ro2 M4 Application of Thevenin analysis seems to imply that Rout1 = 2ro2||ro4 - Why is this incorrect? M.H. Perrott 8 Derivation of Rout1 (Correct Approach) ro5 M1 i1 i1 M2 vtest i 1= 2ro2 i2 1 gm3 ro4 itest = i1 + i2 vtest M4 i2 2ro2 vtest i1 + r o4 Correct approach includes the impact of the current mirror feedback vtest vtest vtest itest = i1 + i2 = i1 + i1 + =2 + ro4 2ro2 ro4 ⇒ Rout1 = ro2||ro4 M.H. Perrott 9 Derivation of Gm1 incremental ground -vid/2 M1 i1 vid/2 M2 iout = i1 + i2 i2 i1 1 gm3 M4 For differential input, we can approximate the source of M1 and M2 as being at incremental ground gm1 vid i1 = −gm1(−vid /2) = 2 gm2 gm1 i2 = gm2(vid/2) = vid = vid 2 2 ⇒ iout = gm1vid ⇒ Gm1 = gm1 = gm2 M.H. Perrott 10 Derivation of Zin incremental ground Cgs2 Cgs1 -vid/2 M1 M2 vid/2 -vid/2 vid/2 Cgs1 -vid/2 1 gm3 M4 M.H. Perrott 1 sCgs1/2 = vid/2 Cgs1 For differential input, we can simplify the input capacitance calculation through the steps shown at the right ⇒ Zin1 = Cgs2 1 Cgs2 -vid/2 vid/2 Cgs1/2 vid Cgs1/2 sCgs2/2 11 Second Stage Analysis M7 Second Stage Two-Port Model Ibias2 Vout vin2 V2 Zin2 Gm2V2 Rout2 CL vout CL Vin2 M6 Two port model derivation is straightforward - This is a common source amplifier 1 Zin2 = sCgs6 Gm2 = gm6 M.H. Perrott Rout2 = ro6 ||ro7 12 Overall Opamp Model First Stage Two-Port Model vid V1 Cgs1 gm1V1 2 ro2||ro4 Second Stage Two-Port Model V2 Cgs6 gm6V2 ro6||ro7 vout CL Overall transfer function vout (s) K H(s) = = vid(s) (1 + s/wp1)(1 + s/wp2) - DC gain - Poles K = gm1(ro2||ro4 )gm6(ro6||ro7 ) wp1 = 1 (ro2||ro4 )Cgs6 1 wp2 = (ro6||ro7 )CL In general, wp2 << wp1 since CL >> Cgs6 M.H. Perrott 13 Consider The Dominant Pole To Be wp2 20log(gm1(ro2||ro4)gm6(ro6||ro7)) 20log Vout/Vid 0dB 1 wp2 = (ro6||ro7)CL w0 w (rad/s) K gm1(ro2||ro4 )gm6(ro6||ro7 ) H(s) = = 1 + s/wp2 1 + s(ro6||ro7 )CL At frequencies >> wp2 gm1(ro2||ro4 )gm6 H(s) ≈ sCL gm1(ro2||ro4 )gm6 ⇒ wo ≈ CL We want wp1 > w0 for good phase margin with unity gain feedback M.H. Perrott 14 Key Issue for Achieving Adequate Phase Margin 20log(gm1(ro2||ro4)gm6(ro6||ro7)) 20log Vout/Vid 0dB wp2 = 1 (ro6||ro7)CL w (rad/s) w0 1 wp1 = (ro2||ro4)Cgs6 gm1(ro2||ro4 )gm6 wo ≈ CL To achieve wp1 > w0 1 wp1 = > wo ⇒ CL > gm1gm6(ro2 ||ro4 )2Cgs6 (ro2||ro4 )Cgs6 - We need a very large value of C relative to Cgs6 This will generally be impractical! M.H. Perrott L 15 Pole Splitting Using a Compensation Capacitor Cc CM vid V1 Cgs1 gm1V1 2 ro2||ro4 V2 Cgs6 gm6V2 ro6||ro7 vout CL Consider placing capacitor Cc across the second stage - Load capacitance seen by stage 1 becomes roughly CM = (1 + gm6(ro6||ro7 ))Cc ≈ gm6(ro6||ro7 )Cc This large Miller capacitance now causes wp1 to become dramatically lower such that it forms the dominant pole 1 1 wp1 ≈ ≈ (ro2 ||ro4 )CM (ro2||ro4 )gm6(ro6||ro7 )Cc We will see that wp2 actually increases in frequency! M.H. Perrott 16 Pole Splitting Using a Compensation Capacitor (Part 2) CM vid V1 Cgs1 gm1V1 2 Cc ro2||ro4 V2 Cgs6 gm6V2 Rth_C ro6||ro7 vout L CL Assuming wp1 forms the dominant pole, we can approximate Cc as a short when calculating wp2 1 Rth CL ≈ gm6 gm6 1 = ⇒ wp2 ≈ (1/gm6)(Cgs6 + CL) Cgs6 + CL - Note: we must have C c >> Cgs6 for this to be accurate The inclusion of capacitor Cc has led to wp2 increasing in frequency M.H. Perrott 17 Impact of Pole Splitting using Compensation Cap 20log(gm1(ro2||ro4)gm6(ro6||ro7)) 20log Vout/Vid w (rad/s) wp1 = 1 (ro2||ro4)gm6(ro6||ro7)Cc 1 wp2 = (ro6||ro7)CL gm6 wp2 = Cgs6+CL 1 wp1 = (ro2||ro4)Cgs6 Pole splitting allows the dominant pole frequency to be dramatically decreased and the main parasitic pole to be dramatically increased - We can achieve higher unity gain frequency with improved phase margin and with reasonable area M.H. Perrott 18 Unity Gain Frequency with Compensation Cap 20log(gm1(ro2||ro4)gm6(ro6||ro7)) 20log Vout/Vid 0dB w (rad/s) wp1 = 1 (ro2||ro4)gm6(ro6||ro7)Cc w0 gm6 wp2 = Cgs6+CL K gm1(ro2 ||ro4 )gm6(ro6 ||ro7 ) H(s) = = 1 + s/wp1 1 + s(ro2||ro4)gm6(ro6||ro7 )Cc At frequencies >> wp1 gm1(ro2||ro4 )gm6(ro6||ro7 ) gm1 H(s) ≈ ⇒ wo ≈ s(ro2 ||ro4)gm6(ro6||ro7 )Cc Cc We want wp2 > w0 for good phase margin with unity gain feedback M.H. Perrott 19 Key Constraints for Achieving Adequate Phase Margin 20log(gm1(ro2||ro4)gm6(ro6||ro7)) 20log Vout/Vid 0dB w (rad/s) wp1 = w0 1 (ro2||ro4)gm6(ro6||ro7)Cc To achieve wp2 > w0 gm6 wp2 = Cgs6+CL gm1 wo ≈ Cc gm6 gm1 wp2 = > wo ⇒ Cc > (Cgs6 + CL) Cgs6 + CL gm6 - Note: we must have C M.H. Perrott c >> Cgs6 for this to be accurate 20 More Accurate Calculations Related to Phase Margin 20log(gm1(ro2||ro4)gm6(ro6||ro7)) 20log Vout/Vid 0dB wp1 = w0 1 (ro2||ro4)gm6(ro6||ro7)Cc To achieve wp2 > w0 w (rad/s) gm6Cc wp2 = Cgs6CL+Cc(Cgs6+CL) gm1 wo ≈ Cc à gm1 Cgs6CL wp2 > wo ⇒ Cc > + Cgs6 + CL gm6 Cc M.H. Perrott ! 21 A More Accurate Transfer Function Model Cc vid V1 Cgs1 gm1V1 2 ro2||ro4 V2 Cgs6 gm6V2 ro6||ro7 vout CL K(1 + s/wz ) vout (s) = H(s) = vid(s) (1 + s/wp1)(1 + s/wp2) K = gm1(ro2||ro4 )gm6(ro6||ro7 ) 1 wp1 = (ro2||ro4 )gm6(ro6||ro7 )Cc gm6Cc wp2 = Cgs6CL + Cc(Cgs6 + CL) µ ¶ gm6 Right half plane (RHP) zero wz = − causes potential stability issues Cc M.H. Perrott 22 Plotting the Magnitude of a RHP Zero Plot the magnitude response of right half plane wz 20 log |Az (w)| = 20 log |1 − jw/wz | - For w << |w |: - For w >> |w |: z 20 log |Az (w)| ≈ 20 log |1| = 0 z 20 log |Az (w)| ≈ 20 log |w/wz | 20log|Az(ω)| 20 dB/decade 0 dB ωz ω Magnitude response is the same as for left half plane zero M.H. Perrott 23 Plotting the Phase of a RHP Zero Plot the phase response of right half plane wz 6 Az (w) = 6 (1 − jw/wz ) = arctan (−w/wz ) - For w << |w |: - For w = |w |: - For w >> |w |: 6 z z 6 z 0o 6 Az (w) ≈ arctan (0) = 0◦ Az (w) ≈ arctan (−1) = −45◦ Az (w) ≈ arctan (−∞) = −90◦ ωz/10 ωz ωz∗10 ω Az(ω) -45o -90 o Phase response is negative rather than positive (similar to pole) M.H. Perrott 24 Phase Margin Degradation Due to RHP Zero 20log Vout/Vid 0dB w (rad/s) gm6 gm1 |wz| = w0 = Cc Cc gm6 wp2 = Cgs6+CL Since the RHP zero adds negative phase (similar to pole), it reduces phase margin - We want: |wz | À wo ⇒ gm6 À gm1 This is not a desirable constraint M.H. Perrott 25 Adding a Compensation Resistor Cc Rc vid V1 Cgs1 gm1V1 2 ro2||ro4 V2 ro6||ro7 Cgs6 gm6V2 vout CL K(1 + s/wz ) vout (s) = H(s) = vid(s) (1 + s/wp1)(1 + s/wp2) K = gm1(ro2||ro4 )gm6(ro6||ro7 ) 1 wp1 = (ro2||ro4 )gm6(ro6||ro7 )Cc gm6Cc wp2 = Cgs6CL + Cc(Cgs6 + CL) µ ¶ gm6 1 wz = − Cc 1 − gm6Rc M.H. Perrott RHP zero effectively removed if Rc = 1/gm6 Improved phase margin possible with Rc > 1/gm6 - See Johns&Martin, pp. 242-244 26 Implementing Rc with a Triode Device M8 M7 M5 Iref Vin- M1 Vin+ M2 Vout CL M9 M3 M4 Cc M6 More compact implementation than a poly resistor Triode channel resistance can somewhat track 1/gm6 across process and temperature variations Key issue: supply sensitivity - See pp. 246-248 of Johns&Martin for solutions to this issue M.H. Perrott 27 Calculations for Triode Compensation Resistor Vdd M9 M4 Cc M6 Triode resistance calculated as 1 Rc = μnCox(W9/L9)(Vgs9 − VT H ) 1 = μn Cox(W9/L9)(Vdd − Vgs6 − VT H ) Assuming square law, 1/gm6 is calculated as 1 1 = gm6 μnCox(W6/L6)(Vgs6 − VT H ) Depending on Vdd, Rc can track 1/gm6 across process/temp M.H. Perrott 28 Summary Basic two-stage CMOS opamp is a workhorse for many moderate performance analog applications - Relatively simple structure with reasonable performance Key issue: two-stages lead to two poles that are relatively close to each other - This leads to very poor phase margin unless very large CL is used Inclusion of a compensation capacitor across the second stage leads to pole splitting such that stable performance can be achieved with reasonable area - A compensation resistor is also desirable to help eliminate the impact of a RHP zero that occurs due to compensation We will use the basic two stage CMOS opamp structure to explore various opamp specifications in the next lecture M.H. Perrott 29