Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
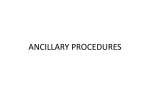
20 10 Investigation in LVAD&CVS interaction and A Non-Invasive control approach Author – Huaiyu Scott Lin Supervisor : Andrey Savkin / Co-Supervisor: Nigel Lovell / Assessor: Victor Solo Introduction Existing designs of Left Ventricular Assist Device have their limitations in responding to recipients’ changing physiological status. The aim of this thesis is to investigate the interaction between the Cardiovascular system and its assisting device, then take a non-invasive approach to control the device thus avoid the extreme scenarios in terms of assistance failure which further damages the native heart. While the invasive methods are commonly used in current researches, it is essential to seek for a non-invasive approach that minimise the risks of thrombus formation caused by implementing physiological sensors and transducers. In additional, a control strategy which is able to track for a changing optimal operating point is the key in designing future fully adaptive control algorithms. Part2: Non-invasive control approach 1. Optimal operating point searching using Extremum Seeking Algorithm for suction avoidance Part1: Biological Signal Analysis 1. Measurement of system Preload Pulsatile waveforms present throughout the blood circulation of body due to the contractile force of cyclic heart beats. Such pulsatile signal indicates the status of left ventricle function as it responds to physiological blood demand. It can be obtained as: PI = LPF(abs(HPF(X))) PI(w) Vs Pump Speed mean Pump speed (rpm) 2800 2600 2400 2200 2000 Low Afterload Medium Afterload Medium High Afterload High Afterload 1800 1600 0 20 40 60 80 PI(w) 100 120 140 160 PI(w) Vs Mean Pump Flow 7 6.5 Mean Pump Flow(L/min) 6 5.5 5 4.5 4 3.5 Low Afterload Medium Afterload Medium High Afterload High Afterload 3 2.5 2 0 20 40 60 80 PI(w) 100 120 140 160 Maintaining a desire pump flow by adjusting a right amount of pump speed is critical in order to achieve a target assistance. Experimental results showed that an increase in speed is required for maintaining a target flow for each increment of systemic afterload as shown on the left. This is true for high flow values and it provides us with an approximated linear relationship between PI(speed) and flow within the drawn box. Clinically, this is the expected working range for an appropriately controlled LVAD since PI(w) can not be less than a certain level which induces suction, and non-linearity beyond the right boundary of the box. 3. Optimal operating point UNSW Result on the left shows a convergence of output value as input is stable. Output 2. Feedback approach to compensate system afterload 2. Non-linearity between pump speed and flow for varying afterload 3000 Input ESC tracks the optimal point of PI by watching its cost function, which is defined as gradient of PI w.r.t speed GPI = dPI/dw A small sinusoidal perturbation is added in order to track the slope of changing convex function of GPI. A simulation work has been carried out by assigning a second order polynomial as plant. An optimal operating point for full assist can be defined as the minimum gradient of PI w.r.t speed thus gives the maximum possible assistance with leaving enough safe margin before suction. Due to the major system linearity between a mean pump flow and the mean rotational speed is caused by changing systemic peripheral resistance (afterload) once a high pump flow is required. We required a speed compensation in order to keep up with the desired flow hence follow the starling law. Result is able to track the reference PI value with inversely change of the input rotational speed. The right top figure shows the tracking process for reaching the desired optimal value obtained from ESC. The bottom figure shows the changing speed with respect to that. PI speed ENGINEERING @ UNSW