Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
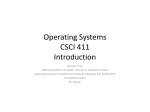
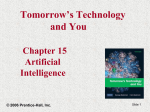
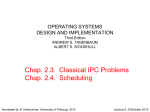
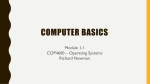
操作系统原理 OPERATING SYSTEM Chapter 2 Processes and Threads 进程与线程 The Process Model Figure 2-1. (a) Multiprogramming of four programs. (b) Conceptual model of four independent, sequential processes. (c) Only one program is active at once. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Process Creation Events which cause process creation: • • • • System initialization. Execution of a process creation system call by a running process. A user request to create a new process. Initiation of a batch job. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Process Termination Events which cause process termination: • • • • Normal exit (voluntary). Error exit (voluntary). Fatal error (involuntary). Killed by another process (involuntary). Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Process States Figure 2-2. A process can be in running, blocked, or ready state. Transitions between these states are as shown. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Implementation of Processes (1) Figure 2-3. The lowest layer of a process-structured operating system handles interrupts and scheduling. Above that layer are sequential processes. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Implementation of Processes (2) Figure 2-4. Some of the fields of a typical process table entry. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Implementation of Processes (3) Figure 2-5. Skeleton of what the lowest level of the operating system does when an interrupt occurs. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Modeling Multiprogramming Figure 2-6. CPU utilization as a function of the number of processes in memory. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Thread Usage (1) Figure 2-7. A word processor with three threads. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Thread Usage (2) Figure 2-8. A multithreaded Web server. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Thread Usage (3) Figure 2-9. A rough outline of the code for Fig. 2-8. (a) Dispatcher thread. (b) Worker thread. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Thread Usage (4) Figure 2-10. Three ways to construct a server. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 The Classical Thread Model (1) Figure 2-11. (a) Three processes each with one thread. (b) One process with three threads. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 The Classical Thread Model (2) Figure 2-12. The first column lists some items shared by all threads in a process. The second one lists some items private to each thread. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 The Classical Thread Model (3) Figure 2-13. Each thread has its own stack. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 POSIX Threads (1) Figure 2-14. Some of the Pthreads function calls. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 POSIX Threads (2) ... Figure 2-15. An example program using threads. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Implementing Threads in User Space Figure 2-16. (a) A user-level threads package. (b) A threads package managed by the kernel. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Implementing Threads in User Space • Advantages – Thread switching in user space is faster than trapping to the kernel • No trapping/ no context switching/ no memory cache flushing – Customized scheduling algorithm – Scale better • Disadvantages – Difficult to use blocking system call • Nonblocking call requires the changes to the OS and user programs • Jacket or wrapper – Page fault • Blocking entire process until the disk I/O is complete – Running for ever unless giving up CPU voluntarily • Runtime request clock signal (interrupt) per second – Crude and messy to program/ Overhead/ interfere with real clock interrupt – Blocking in the system call, kernel or select ? Implementing Threads in the Kernel • Advantages – Schedule the threads across the different processes – Does not need new, nonblocking system calls • Disadvantages – Scheduling cost and system call cost like creation or termination in the kernel is greater than those in run-time • Recycle threads • Existing problems – Fork – Signal Hybrid Implementations Figure 2-17. Multiplexing user-level threads onto kernel-level threads. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Scheduler Activations • Goal – Mimic the functionality of kernel threads – Maintain the better performance and greater flexibility of threads packages in user space • Implementation – Avoid unnecessary transitions between user and kernel space – Upcall – Kernel => runtime • Problem – Violate the principle of layered system structure Pop-Up Threads Figure 2-18. Creation of a new thread when a message arrives. (a) Before the message arrives. (b) After the message arrives. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Making Single-Threaded Code Multithreaded (1) Figure 2-19. Conflicts between threads over the use of a global variable. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Making Single-Threaded Code Multithreaded (2) Figure 2-20. Threads can have private global variables. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Making Single-Threaded Code Multithreaded (3) • New scoping level – variables visible to all the procedures of a thread • New library procedures – Create_global(‘bufptr’); – Set_global(‘bufper’, &buf); – Bufptr = read_global(‘bufptr’); • Reentrant – Communication buffer – Memory allocation • Signal – Kernel hardly directs the signal to the right thread implemented entirely in user space – One thread is only able to process a signal at a time while multiple threads alarm independently – Keyboard interrupt • Stack InterProcess Communication Three basic issues: • How to pass information among processes? • How to avoid two or more processes getting in each other’s way? • How to do proper sequencing when dependencies are present? Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Race Conditions Figure 2-21. Two processes want to access shared memory at the same time. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Race conditions • • • Example •Print spooler Race conditions definition • Two or more processes are reading or writing some shared data and the final result depends on who runs precisely when. Avoid race condition • Mutual exclusion: if one process is using a shard variable or file , the other processes will be excluded from doing the same thing. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Critical Regions (1) Definition of the critical regions: • The part of the program where the shared memory is accessed. Conditions required to avoid race condition: • • • • No two processes may be simultaneously inside their critical regions. No assumptions may be made about speeds or the number of CPUs. No process running outside its critical region may block other processes. No process should have to wait forever to enter its critical region. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Critical Regions (2) Figure 2-22. Mutual exclusion using critical regions. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Mutual Exclusion with Busy Waiting Proposals for achieving mutual exclusion: • • • • • Disabling interrupts Lock variables Strict alternation Peterson's solution The TSL instruction Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Strict Alternation •Busy waiting •Violate condition 3 Figure 2-23. A proposed solution to the critical region problem. (a) Process 0. (b) Process 1. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Peterson's Solution Figure 2-24. Peterson’s solution for achieving mutual exclusion. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 The TSL Instruction (1) • hardware instructions • indivisible Figure 2-25. Entering and leaving a critical region using the TSL instruction. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 The TSL Instruction (2) Figure 2-26. Entering and leaving a critical region using the XCHG instruction. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 More solutions Disadvantages of busy waiting approaches: • • Waste CPU time Priority inversion problem More solutions: • • • • • • Sleep and wakeup Semaphore Mutex Monitor Message passing Barrier Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Example: The Producer-Consumer Problem ( bounded-buffer problem ) Figure 2-27. The producer-consumer problem with a fatal race condition. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Semaphores • semaphore: a variable used to count the number of wakeups saved for future use. • “down/up” = “P/V”: atomic action / indivisible Figure 2-28. The producer-consumer problem using semaphores. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Mutexes • A mutex is a variable that can be one of two states: unlocked or locked • A mutex is used to allow or block access to a critical region Figure 2-29. Implementation of mutex lock and mutex unlock. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Mutexes in Pthreads (1) Figure 2-30. Some of the Pthreads calls relating to mutexes. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Mutexes in Pthreads (2) • Condition variables allow threads to block due to some condition not being met. Figure 2-31. Some of the Pthreads calls relating to condition variables. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Mutexes in Pthreads (3) Figure 2-32. Using threads to solve the producer-consumer problem. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Monitors (1) Figure 2-33. A monitor. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Monitors (2) Figure 2-34. An outline of the producer-consumer problem with monitors. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Monitors (3) Figure 2-35. A solution to the producer-consumer problem in Java. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Monitors (4) Figure 2-35. A solution to the producer-consumer problem in Java. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Monitors (5) Figure 2-35. A solution to the producer-consumer problem in Java. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Producer-Consumer Problem with Message Passing (1) Figure 2-36. The producer-consumer problem with N messages. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Producer-Consumer Problem with Message Passing (2) Figure 2-36. The producer-consumer problem with N messages. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Barriers • Barrier is a synchronization mechanism for groups of processes. • Barrier blocks the processes until all processes arrive. (c) Figure 2-37. Use of a barrier. (a) Processes approaching a barrier. (b) All processes but one blocked at the barrier. When the last process arrives at the barrier, all of them are let through. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Scheduling – Process Behavior Figure 2-38. Bursts of CPU usage alternate with periods of waiting for I/O. (a) A CPU-bound process. (b) An I/O-bound process. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 When to Schedule • • • • • When a new process is created When a process exits When a process blocks on I/O, on a semaphore, or for some other reason When an I/O interrupt occurs When the periodic clock interrupts occur •Nonpreemptive scheduling •Preemptive scheduling Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Categories of Scheduling Algorithms • • • Batch Interactive Real time Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Scheduling Algorithm Goals Figure 2-39. Some goals of the scheduling algorithm under different circumstances. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Scheduling in Batch Systems • • First-come first-served •nonpreemptive Shortest job first •nonpreemptive • Shortest remaining Time next •preemptive Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Shortest Job First Optimal Solution: (4a+3b+2c+d)/4 Figure 2-40. An example of shortest job first scheduling. (a) Running four jobs in the original order. Average turnaround=14 (b) Running them in shortest job first order. Average turnaround=11 Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Scheduling in Interactive Systems • • • • Round-robin scheduling Priority scheduling Multiple queues Shortest process next • T0, T0/2+T1/2,T0/4+T1/4+T2/2… • Guaranteed scheduling • Ratio of actual CPU time consumed to CPU time entitled • Lottery scheduling • A process holding a fraction f of the tickets will get about a fraction f of the resource • Fair-share scheduling • Take into account the owner of the processes Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Round-Robin Scheduling • quantum Figure 2-41. Round-robin scheduling. (a) The list of runnable processes. (b) The list of runnable processes after B uses up its quantum. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Priority Scheduling Adjust priorities: • Decrease the priority of currently running process at each clock tick •Assign a quantum to each process, switch processes when current quantum is used up Figure 2-42. A scheduling algorithm with four priority classes. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Scheduling in Real-Time System • • • Hard real time / soft real time Periodic/ aperiodic Scheduable • ∑Ci/Pi <= 1, (i=1..m) • Example: 100, 200 and 500 msec of periods; 50, 30 and 100 msec of CPU time; 0.5+0.15+0.2 < 1; 1sec / 150 msec; • Static scheduling algorithm • • RMS (Rate Monotonic Scheduling) Dynamic scheduling algorithm • EDF (Earliest Deadline First) Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Thread Scheduling Figure 2-43 (a) Figure 2-43 (b) (a) Possible scheduling of user-level threads with a 50-msec process quantum and threads that run 5 msec per CPU burst. (b) Possible scheduling of kernel-level threads with the same characteristics as (a). Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Classical IPC Problems Dining Philosophers Problem (1) Figure 2-44. Lunch time in the Philosophy Department. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Dining Philosophers Problem (2) Figure 2-45. A nonsolution to the dining philosophers problem. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Dining Philosophers Problem (3) ... Figure 2-46. A solution to the dining philosophers problem. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Dining Philosophers Problem (4) ... ... Figure 2-46. A solution to the dining philosophers problem. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 Dining Philosophers Problem (5) ... Figure 2-46. A solution to the dining philosophers problem. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 The Readers and Writers Problem (1) ... Figure 2-47. A solution to the readers and writers problem. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639 The Readers and Writers Problem (2) ... Figure 2-47. A solution to the readers and writers problem. Tanenbaum, Modern Operating Systems 3 e, (c) 2008 Prentice-Hall, Inc. All rights reserved. 0-13-6006639